






(1)工件到达检测工位后可实现自动拍照;
(2)采集的图像可放大,可以看清条码数字、接线端等细节图,满足技术要求中的检测项;
(3)读出被测物上指定的条形码;
(4)采集后图像及条形码信息打包存入数据库,且数据库便于操作人员查阅。

相关尺寸如下,可根据不同项目借鉴
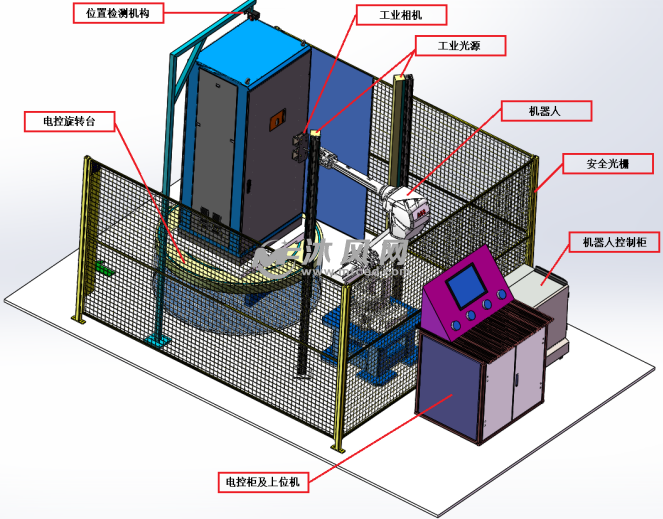
机器人末端夹持相机、光源进行拍照和条码读取
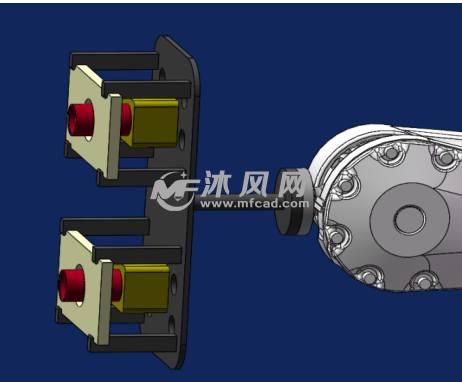
功能:对工件进行拍照和条码读取
视觉系统由工业相机及光源组成,工业光源及工业相机的使用寿命皆可达到5年以上。光源为相机提供稳定的拍照环境,使所拍摄的图像更加清晰。视觉系统由两个相机组成,一个相机负责拍摄较大范围的图像,另一个相机负责拍摄并识别条形码。
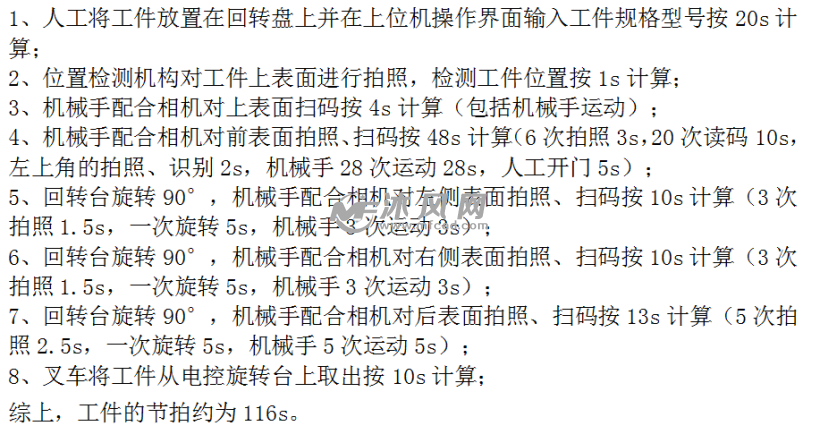
相关工艺流程如图
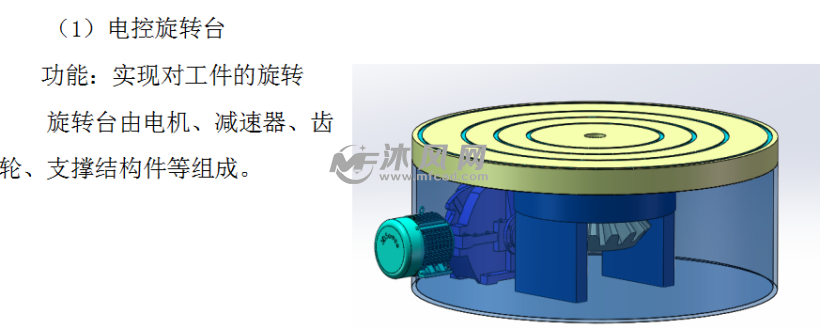
(1)电控旋转台
功能:实现对工件的旋转
旋转台由电机、减速器、齿轮、支撑结构件等组成。
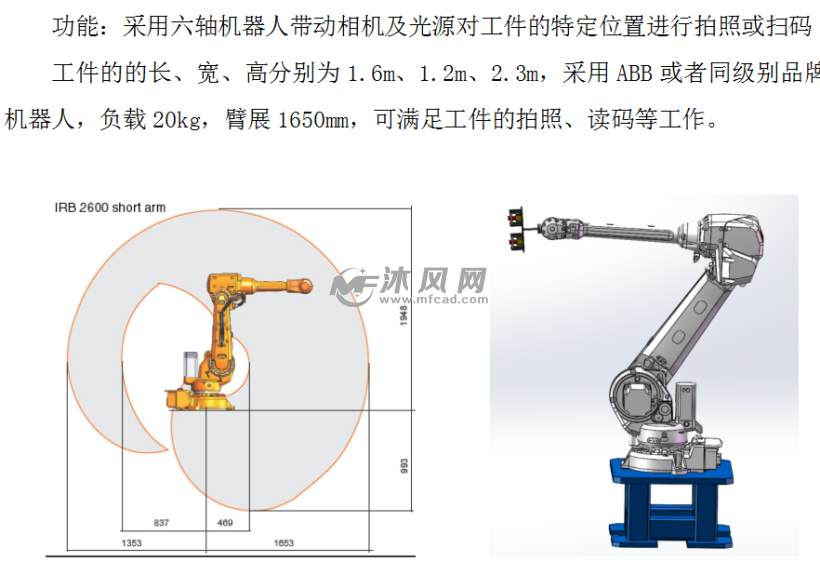
功能:采用六轴机器人带动相机及光源对工件的特定位置进行拍照或扫码
工件的的长、宽、高分别为1.6m、1.2m、2.3m,采用ABB或者同级别品牌机器人,负载20kg,臂展1650mm,可满足工件的拍照、读码等工作。















 2730
2730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









