







操纵杆按钮功能
默认情况下,ArduSub固件带有如下所示的按钮设置:

可通过以下步骤重新分配按钮:
进入车辆设置视图,然后选择“操纵杆”。
“按钮分配”选项卡显示所有按钮当前设置为控制的内容。
按你想换的按钮按钮号码将亮起。
从按钮编号右侧的下拉列表中选择希望按钮执行的操作。
飞行模式
在手动模式下,车辆将仅根据操纵手柄的先导输入输出电机控制。没有反馈稳定,航向保持或深度保持。
在稳定模式下,车辆将稳定侧翻至水平位置,并且在未被指令转弯时保持前进方向。垂直控制权完全交给飞行员。
在深度保持模式下,除非您命令它俯冲/上升,否则车辆将保持深度。当没有指令转弯时,它还将稳定侧翻至水平并保持航向。
导频输入增益
飞行员输入增益控制有多少功率可用于推进器控制。
增益设置可以通过JS_Gain参数设置进行调整。
俯仰/侧倾控制
目前(由于传统/继承原因),没有方便的方法来控制和ArduSub车辆的侧倾和俯仰。可用的解决方案是使用roll_pitch_toggle操纵杆按钮功能。按下此按钮时,前向和横向操纵手柄轴在控制车辆向前和横向运动以及控制车辆侧倾和俯仰之间切换。
侧倾和俯仰输入在不同的飞行模式下表现不同。有关不同飞行模式如何工作的更多信息,请参阅飞行模式文档。
手动:侧倾和俯仰输入控制车辆的转速。只要操纵杆输入偏转,车辆将继续旋转。中央操纵杆输入命令转速为零。
ACRO:这个功能和手动一样,但旋转速度是精确控制和稳定的。
稳定:侧倾和俯仰输入控制车辆姿态的期望角度。当操纵杆输入居中时,车辆将稳定水平姿态。当操纵手柄输入偏转时,车辆将稳定偏转角度。有两个参数控制车辆的最大偏转角度:飞行员输入增益(缩放输入)和角度最大参数(控制车辆在稳定模式下偏转的最大角度)。例如,如果ANGLE_MAX参数为80度,输入增益为50%,当横摇或俯仰操纵杆输入完全偏转时,车辆将偏转40度(0.5*80)。当车辆转向时,按下滚动/俯仰切换操纵杆按钮,以锁定当前偏转角度并返回控制向前和横向运动。要清除侧滚和俯仰输入命令,请切换到手动模式,或按滚动俯仰切换按钮。
深度保持:此功能类似于稳定模式,但仅允许小角度。车辆在较大角度时会出现异常行为。在深度保持模式下,应避免横摇和俯仰输入,直到得到正确支持。
配套Web界面
伴随计算机(安装说明)拥有一个有用的web界面,该界面具有不同的页面,用于访问与Companion相关联的参数和功能。当伴生计算机连接到地面计算机时,用户可以访问192.168.2.2:2770上的web界面。用户可以访问网络、系统、摄像头和路由页面以及其他一些用户友好的选项,如下所述。
伴奏头
web界面标题显示配套软件版本。它提供指向web界面中可用的主配置页面的导航链接、重新启动和关闭配套计算机的选项以及启用当前页面上的高级选项的开关(如果可用)。

以下页面可直接从主标题获取:
网络
系统
照相机
路由
其他页面:
除了可以通过直接链接访问的四个页面外,Companion web interface还提供了一些其他页面,用于与更多功能进行交互。
MAVProxy
吉特
Water Linked
浏览器终端
文件系统访问
MAVLink REST API
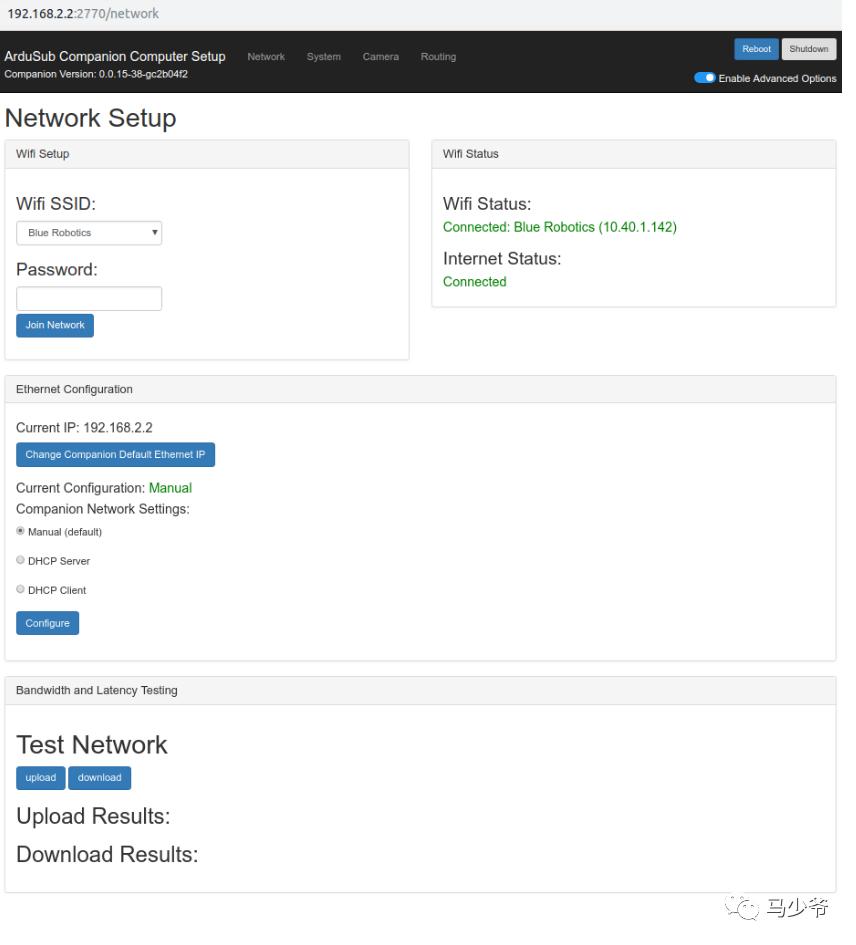
网络
默认情况下,web界面在“网络”页面打开。此页面允许用户:
配置WiFi
检查WiFi和互联网状态
配置以太网IP地址
测试网络的上传和下载
以太网网络配置(高级):以太网接口可以配置为DHCP服务器、DHCP客户端或手动(静态)模式。
手动:手动:接口配置静态IP地址。这是默认配置。默认IP地址为192.168.2.2。
DHCP服务器:接口配置为192.168.2.x子网上的DHCP服务器。在此模式下,接口IP地址为192.168.2.2。
DHCP客户端:这对于连接到路由器很有用。
系统
系统页面提供以下功能和功能:
更新配套软件
显示系统资源信息
显示活动服
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 337
337











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









