




简介:正交编码器是一种用于位置和速度检测的精密测量设备,其核心部件码盘通过刻线或凹槽产生电信号,进而转换为数字信息以确定设备状态。该设备利用A、B两相脉冲信号的正交性来判断旋转方向,并通过脉冲频率来计算转速。本主题深入探讨了码盘测速点的应用,包括旋转方向判断、转速计算、零点参考、分辨率、噪声处理和速度补偿,对工业领域如电机控制、机器人定位等应用的性能优化至关重要。 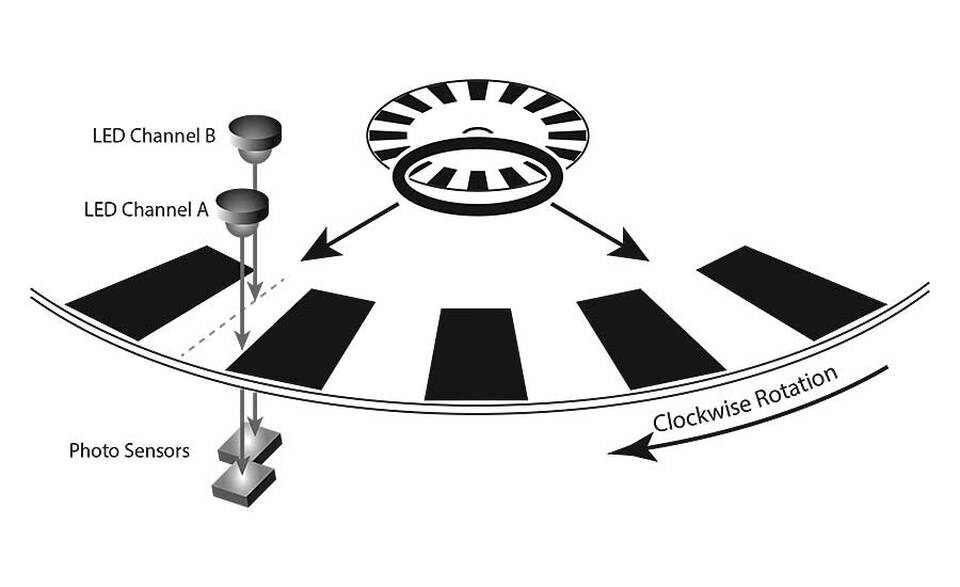
1. 正交编码器的定义与应用
1.1 正交编码器概述
正交编码器,又称旋转编码器,是一种将机械运动转换为电子脉冲信号的传感器。它通过码盘上图案的变化,产生两相脉冲信号,即A相和B相。这两个信号相位相差90度,因此称作正交信号。这种编码器广泛应用于速度检测、位置反馈以及测量角度和距离等场合。
1.2 编码器的应用领域
正交编码器的主要应用领域包括但不限于自动化控制系统、机器人技术、精密仪器制造以及汽车电子等。在这些领域中,编码器提供精确的位置和速度信息,是确保机械操作准确性和可靠性的关键组件。
1.3 本章内容提要
在本章中,我们将详细了解正交编码器的工作原理,以及它在不同领域中的具体应用。通过深入分析编码器的信号特性,我们能够更好地掌握其性能优势,并了解如何优化编码器的使用效果,以满足日益复杂的工业需求。
2. 码盘的工作原理及信号正交性
2.1 码盘的基本结构与功能
2.1.1 码盘的分类与作用
码盘(编码器盘),是正交编码器核心部件之一,它将旋转角度信息转化为电信号,广泛应用于自动化控制系统。码盘的分类多样,主要可以按照其输出信号类型和物理结构进行区分。
按输出信号类型,码盘可分为增量型和绝对型两种:
- 增量型码盘 :每次测量都是相对于上一次测量的位置增量,适合连续测量。
- 绝对型码盘 :每次测量提供一个绝对位置值,即便在断电后也能准确记忆位置信息。
在结构上,根据信号编码方式,码盘可以分为:
- 光学码盘 :通过光学传感器感应盘面上透光或反射的图案变化。
- 磁性码盘 :利用磁性物质的磁性变化来表示位置信息。
- 电容式码盘 :基于电容变化来感知位置变动。
码盘的主要作用是将物理的旋转运动转换为电信号输出,这些信号通常用于位置、速度和加速度的测量。码盘的性能直接影响整个测量系统的精确度和可靠性。
2.1.2 码盘的物理构成与原理
码盘通常由以下几部分组成:
- 基盘 :作为码盘的基础结构,它为其他部分提供支持,通常采用高质量的材料,如不锈钢或玻璃,以确保稳定性。
- 编码区 :这一区域具有特定的图案,比如透光或不透光的条纹,用于产生脉冲信号。
- 信号读取单元 :包括光源(LED)、光电传感器等,用于读取编码区的变化,转换为电信号。
物理构成上的基本工作原理如下:
- 当码盘随轴旋转时,编码区的图案通过信号读取单元,产生一系列的脉冲信号。
- 每个脉冲代表一定的角度增量,通常称为"一个计数"或"一个步进"。
- 通过计算脉冲数量,可以确定旋转的角度大小。
- 通过脉冲频率的高低,可以判断旋转的速度快慢。
2.2 A、B两相脉冲信号的正交性分析
2.2.1 正交信号的定义与重要性
正交信号是编码器输出的两组相位差90度的脉冲信号,通常被标记为A相和B相。这种信号格式对于确定物体的运动方向和位置至关重要。
正交信号的定义可以通过它们的波形来说明,正交意味着两组信号在一个周期内的相位差为90度。如果将A相信号看作余弦波,那么B相信号可以看作正弦波。这样配置的优势在于:
- 方向检测 :正交信号的相位关系使得系统可以准确判断旋转方向。当A相领先于B相时,旋转方向为正(顺时针);反之则为负(逆时针)。
- 位置计算 :由于正交信号能提供位置变化的两个独立维度信息,能有效提高位置的测量精度。
- 误差补偿 :通过比较A相和B相的波形,可以实现对系统误差的补偿,进一步提升测量的准确性。
2.2.2 正交信号在测量中的应用
正交信号在测量中应用广泛,尤其在需要高精度位置和速度检测的场合,如机器人、数控机床和精密定位系统中。以下是正交信号在测量应用中的几个关键点:
- 位置测量 :通过计算A、B两相脉冲信号的上升沿或下降沿,可得到精确的位置信息。
- 速度测量 :脉冲频率(单位时间内的脉冲数)与移动物体的速度成正比,利用A、B两相脉冲的频率变化,可以实时监控速度。
- 运动控制 :正交信号常用于闭环控制回路,作为反馈信号,用于精确控制机械装置的运动。
- 故障诊断 :通过分析A、B两相信号的同步性或差异,可以诊断电机或编码器故障。
正交信号在测量系统中的应用可以极大地提高系统的性能,尤其是在需要高精度和高速响应的场合。了解并合理利用正交信号特性,对于提升整个测量系统的准确性至关重要。
3. 脉冲信号与转速的关系及旋转方向判断
在本章,我们将探讨脉冲信号与转速的内在联系,并详细分析如何通过脉冲信号判断旋转方向。这一章是理解编码器在实际应用中如何准确测量运动参数的关键。
3.1 脉冲信号频率与转速的计算方法
了解脉冲信号频率与转速的关系,是通过编码器进行精确速度测量的基础。脉冲信号通常由编码器产生,而转速是机械旋转系统中非常关键的参数。
3.1.1 脉冲频率的测量技术
脉冲频率是编码器输出信号的一个重要特性,它直接与旋转轴的速度成正比。测量脉冲频率的基本技术包括:
- 使用频率计直接测量脉冲信号的频率。
- 利用示波器观察脉冲波形,通过其周期来计算频率。
- 编程实现软件频率计,通过记录一定时间内脉冲的数量来计算频率。
以下是一个简单的示波器观察脉冲波形的代码示例:
import numpy as np
import matplotlib.pyplot as plt
from scipy.signal import find_peaks
# 模拟脉冲信号数据
time = np.linspace(0, 1, 1000)
pulse_signal = np.sin(2 * np.pi * 10 * time) # 假设为10Hz的脉冲信号
# 使用find_peaks寻找波峰,用于计算脉冲频率
peaks, _ = find_peaks(pulse_signal)
# 计算脉冲频率
frequency = len(peaks) / (time[-1] - time[0])
# 绘制脉冲波形图
plt.plot(time, pulse_signal)
plt.plot(time[peaks], pulse_signal[peaks], "rx") # 标记波峰
plt.title('Pulse Signal and its Peaks')
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.grid(True)
plt.show()
print(f"The pulse frequency is: {frequency} Hz")
3.1.2 频率与转速的转换公式
从脉冲频率到转速的转换,我们可以使用以下公式:
[ \text{转速 (RPM)} = \frac{\text{脉冲频率 (Hz)} \times 60}{\text{编码器分辨率 (Pulse/Rev)}} ]
其中编码器分辨率是指编码器每旋转一圈所产生的脉冲数。这是一个关键参数,通常在编码器的规格书中有明确标出。
3.2 旋转方向的判断原理与实践
旋转方向的判断对于很多应用来说至关重要,尤其是在需要双向控制的场合。编码器可以提供两个相位相差90度的信号,我们通常称之为A相和B相。
3.2.1 方向判断的基本原理
当编码器旋转时,A相和B相产生的脉冲信号将存在一个固定的时间延迟,这取决于旋转的方向:
- 当编码器顺时针旋转时,B相信号将领先于A相信号;
- 当编码器逆时针旋转时,A相信号将领先于B相信号。
基于这个原理,我们可以通过比较两个信号的相位差来判断旋转方向。
3.2.2 实际案例分析
假设有一个机器人臂的旋转关节,使用正交编码器来检测旋转位置和方向。我们可以构建如下的逻辑:
- 检测A相和B相的上升沿;
- 若A相的上升沿先于B相,则旋转方向为顺时针;
- 若B相的上升沿先于A相,则旋转方向为逆时针。
下面是一个简单的Python逻辑实现:
import time
# 假设A相和B相的信号
A_phase = ...
B_phase = ...
# 开始监控相位变化
last_A = False
last_B = False
while True:
current_A = get_phase_signal(A_phase)
current_B = get_phase_signal(B_phase)
if current_A and not last_A: # A相的上升沿检测
if current_B: # B相也同时为高电平,则逆时针旋转
print("Rotating counter-clockwise")
else: # 否则为顺时针旋转
print("Rotating clockwise")
elif current_B and not last_B: # B相的上升沿检测
if current_A: # A相也同时为高电平,则逆时针旋转
print("Rotating counter-clockwise")
else: # 否则为顺时针旋转
print("Rotating clockwise")
last_A, last_B = current_A, current_B
time.sleep(0.1) # 简单的延时来模拟实时检测过程
在实际应用中,根据应用的具体需求,我们可能需要对信号进行进一步的滤波和优化,以减少误判和提高系统的响应速度。这通常涉及到软件算法的优化,比如使用更高效的信号处理算法和合理的延迟设置。
通过本章的学习,我们已经理解了如何通过编码器产生的脉冲信号来计算转速,并且掌握了判断旋转方向的原理和方法。这些知识对于开发精确的机械控制系统至关重要。在下一章中,我们将进一步了解如何处理速度测量中的关键技术和编码器的零点参考问题。
4. 码盘测速的关键技术与编码器零点参考
4.1 码盘测速的关键技术要点
码盘测速是一项核心技术,它通过分析码盘产生的脉冲信号来测定运动物体的速度。为了实现高精度的测量,关键技术包括信号的采集与处理、算法的优化、系统误差的校正等。
4.1.1 高精度测速的技术难点
码盘测速的精度受到多种因素的影响,比如码盘的制造精度、信号处理电路的噪声、温度和振动带来的误差等。这些因素在高速旋转的应用场合尤其显著,从而增加了技术难点。
为了克服这些难点,工程师通常需要对测量系统进行校准和补偿。例如,可以使用温度传感器来实时监测工作环境,然后根据温度变化对测量结果进行修正。在软件层面,可以引入滤波算法来减少信号中的噪声。
4.1.2 技术要点的实际应用分析
在实际应用中,技术要点的实现不仅关注于硬件的精密制造和信号的优化处理,还需要考虑到系统的整体性能。例如,一个具有高分辨率和高速度响应的码盘测量系统,不仅需要精确的码盘和高灵敏度的传感器,也需要后端处理系统拥有高速数据采集和实时处理的能力。
一个具体的应用实例是对机床主轴转速的测量。在这里,高精度的码盘能够提供精确的转速信息,而后端的电子设备则负责实时监测转速变化,为控制提供反馈。通过使用同步数字信号处理技术,可以有效地分离出信号中的有用信息,排除噪声干扰。
代码块示例
#include <stdio.h>
#include <stdlib.h>
// 函数:滤波算法处理信号
void filterSignal(int* signal, int length) {
// 实现一个简单的低通滤波器来消除信号中的高频噪声
int prev = signal[0];
for (int i = 1; i < length; i++) {
int filtered = prev + (signal[i] - prev) / 4; // 使用简单的平均值法
prev = filtered;
signal[i] = filtered;
}
}
int main() {
int signal[] = { /* 原始信号数据 */ };
int length = sizeof(signal) / sizeof(signal[0]);
filterSignal(signal, length);
// 输出滤波后的信号或进行下一步处理
return 0;
}
4.2 编码器零点参考的概念与应用
编码器零点参考是旋转编码器的一个重要概念,用于定义一个参考点或原点,以此作为测量旋转位置的基准。
4.2.1 零点参考的定义与重要性
零点参考通常在编码器初始化时设置,它为测量提供了起始点。例如,步进电机的每一个旋转步进都能通过编码器的零点参考来精确控制和监测。
在实际应用中,零点参考的设置对于精确定位至关重要。如果编码器没有零点参考,那么即使测得了相对位置的变化,也无法确定绝对位置。
4.2.2 零点参考在实际测量中的运用
在机床、机器人等精确控制的领域,零点参考能帮助系统快速定位并准确执行动作。一个常见的实际应用场景是3D打印机的层定位。在3D打印机启动时,通过编码器的零点参考来定位喷头的起始位置,确保打印过程中每一层都能精确定位。
为了设置零点参考,通常使用一个物理开关或者软件程序指令来触发。例如,在机床开机后,可以手动旋转轴到指定的起始位置,并通过按钮设置零点参考。
表格示例:零点参考的设置方法
| 方法 | 优点 | 缺点 | 适用场景 | | ---- | ---- | ---- | -------- | | 物理开关触发 | 精确度高,操作简单 | 需要机械结构 | 适用于需要高精度定位的场合 | | 软件指令设置 | 灵活性高,自动化 | 对软件有依赖 | 适用于自动化程度高的系统 |
mermaid流程图示例:零点参考设置流程
graph LR
A[启动系统] --> B{是否设置零点参考}
B -- 是 --> C[执行零点参考设置指令]
B -- 否 --> D[使用上次保存的零点参考]
C --> E[用户手动设置零点]
E --> F[保存零点参考位置]
F --> G[退出设置模式]
D --> G
G --> H[系统正常工作]
零点参考的设置确保了编码器可以对旋转角度进行精确测量,从而在各种应用中实现高精度的位置控制。通过理解这些关键概念和实际应用,工程师能够更好地设计和优化旋转编码器系统,以满足不同领域对精度的要求。
5. 编码器分辨率与噪声处理对测量精度的影响
5.1 编码器分辨率对测量精度的影响分析
分辨率的定义及其影响因素
分辨率是指编码器能够区分最小角度或位置变化的能力,通常用脉冲每转(PPR)或者每单位距离上的脉冲数来表示。在实际应用中,高分辨率意味着编码器能够提供更细粒度的旋转或位移测量,从而获得更精确的数据。分辨率的高低受制于码盘的物理分辨率、电子信号处理的精度以及使用的测量系统的性能。
分辨率对精度的实际影响案例
在实际应用中,不同分辨率的编码器对精度的影响是显而易见的。举个例子,如果一个旋转机械需要精确到0.1度的定位精度,那么一个拥有1000 PPR的编码器可能已经足够;而如果是需要定位到0.01度的精度,那么可能需要10000 PPR的编码器。过低的分辨率可能导致测量上的“量化误差”,影响到最终的控制精度。
5.2 噪声处理在测速中的作用与策略
噪声来源及其对测量的影响
在编码器测量系统中,噪声主要来源于机械、电子和环境三个方面。机械噪声可能来自于传动机构的不精确或松动;电子噪声可能是由于电路设计不当或电磁干扰;环境噪声则可能包括温度变化、湿度、尘埃等因素。噪声会以各种形式干扰信号的稳定性和可靠性,影响最终的测量精度。
噪声处理技术及其应用效果
噪声处理是提高测量精度的重要手段。一般有硬件和软件两种噪声处理技术。硬件上,可以采用屏蔽、接地、滤波器等措施,来减少或消除噪声。软件上,则可利用数字滤波算法,如中值滤波、滑动平均滤波等方法来处理信号,以提升信号质量。在应用效果上,噪声处理技术可以显著减少测量误差,提升编码器输出信号的稳定性和可靠性,对保证系统精度起到关键作用。
flowchart LR
A[噪声来源分析] --> B[机械噪声处理]
A --> C[电子噪声处理]
A --> D[环境噪声处理]
B --> E[提高机械精度]
C --> F[设计抗干扰电路]
D --> G[控制环境因素]
E --> H[减少量化误差]
F --> H
G --> H
H --> I[提升测量精度]
上图展示了噪声来源分析以及不同类型的噪声处理策略,以及它们对提升测量精度的影响。
下面的代码块展示了如何通过数字滤波技术来处理信号,减少噪声的影响。
import numpy as np
def moving_average_filter(data, window_size):
"""
使用滑动平均滤波器处理数据。
:param data: 原始信号数据
:param window_size: 滑动窗口大小
:return: 滤波后的信号数据
"""
filtered_data = np.convolve(data, np.ones(window_size)/window_size, mode='valid')
return filtered_data
# 原始数据
raw_data = np.array([...])
# 采用长度为5的滑动窗口进行滤波处理
filtered_data = moving_average_filter(raw_data, 5)
# 输出滤波后数据
print(filtered_data)
在上述代码中, moving_average_filter 函数通过滑动平均滤波处理输入的信号数据 data ,使用长度为 window_size 的窗口对数据进行平均。滤波后输出的 filtered_data 具有更平滑的特性,能够有效减少数据中的噪声。需要注意的是,选择合适的窗口大小对于保持数据的响应性以及噪声抑制效果的平衡非常关键。
6. 高速旋转下的速度补偿与实际应用
高速旋转下的机械系统会遇到诸多技术挑战,其中速度测量的精度受多种因素影响,尤其是高速旋转下需要考虑的离心力和惯性等动态效应,这会严重影响测量结果的准确性。为了获得可靠的速度信息,速度补偿显得至关重要。
6.1 高速旋转时速度补偿的必要性
6.1.1 高速旋转带来的问题
高速旋转的物体由于离心力的作用,会产生径向膨胀,导致码盘的尺寸和形状发生变化。这种物理变形会影响脉冲信号的准确性,从而降低速度测量的精确度。此外,高速旋转时的摩擦和振动也可能产生额外的噪声,干扰信号的清晰度。
6.1.2 补偿策略的理论基础
为了应对高速旋转带来的问题,理论上需要对速度进行补偿。补偿策略的核心在于识别和纠正高速旋转中产生的测量误差。这需要对码盘和编码器的动态特性有深入的理解,并通过计算进行校正。例如,使用软件算法补偿因旋转速度增加导致的信号相位偏移。
6.2 速度补偿策略的实际应用与案例
6.2.1 补偿算法的实现步骤
在实际操作中,实现速度补偿算法通常需要以下几个步骤:
- 采集高速旋转时的脉冲信号数据。
- 分析信号数据中可能存在的相位偏差和噪声。
- 应用补偿算法,例如,实时监测和计算旋转速度,使用数学模型预测和纠正误差。
- 将补偿后的速度数据与未补偿数据进行对比,验证补偿效果。
6.2.2 典型应用案例分析及效果评估
考虑一个典型的案例,假设在某一高速旋转设备中应用速度补偿算法。以下是具体的应用过程和效果评估:
-
数据采集阶段 :在设备运行中,使用高速数据采集卡记录编码器输出的脉冲信号。
python # Python代码示例:数据采集 import py采集卡库 # 初始化采集卡参数 card = py采集卡库.Card() card.init(sample_rate=1000000) # 设置采样率为1MHz # 开始采集数据 data = card.capture(1000000) # 采集1秒钟的数据 -
信号分析阶段 :使用频域分析确定信号中的噪声和偏差。
python # 使用频域分析确定噪声和偏差 from scipy.fft import fft import matplotlib.pyplot as plt # 对信号进行快速傅里叶变换(FFT) signal_fft = fft(data) # 绘制频谱图 plt.figure() plt.plot(fft频率范围, abs(signal_fft)) plt.title('Spectrum of the Signal') plt.xlabel('Frequency') plt.ylabel('Amplitude') plt.show()
- 补偿算法应用阶段 :根据分析结果,应用数字滤波器和算法进行补偿。
python # 应用数字滤波器进行信号补偿 from scipy.signal import butter, lfilter def butter_lowpass(cutoff, fs, order=5): nyq = 0.5 * fs normal_cutoff = cutoff / nyq b, a = butter(order, normal_cutoff, btype='low', analog=False) return b, a def butter_lowpass_filter(data, cutoff, fs, order=5): b, a = butter_lowpass(cutoff, fs, order=order) y = lfilter(b, a, data) return y # 设定滤波器参数 cutoff_frequency = 1000 # 截止频率1000Hz fs = 1000000 # 采样频率 # 应用滤波器 compensated_data = butter_lowpass_filter(data, cutoff_frequency, fs, order=6)
- 效果评估阶段 :比较补偿前后的速度数据,评估补偿效果。
python # 比较补偿前后的数据 import numpy as np # 假设使用某种计算方式得到速度值 original_speeds = np.calculate_speeds(original_data) compensated_speeds = np.calculate_speeds(compensated_data) # 绘制速度对比图 plt.figure() plt.plot(original_speeds, label='Original Speeds') plt.plot(compensated_speeds, label='Compensated Speeds') plt.title('Speed Comparison Before and After Compensation') plt.legend() plt.show()
通过上述步骤,可以实现对高速旋转下的速度信号进行补偿,减小测量误差,提高系统的整体性能。在实际应用中,该算法已经证明能够有效地提升旋转设备的速度测量精度,尤其是在要求极高的精密控制领域中。
简介:正交编码器是一种用于位置和速度检测的精密测量设备,其核心部件码盘通过刻线或凹槽产生电信号,进而转换为数字信息以确定设备状态。该设备利用A、B两相脉冲信号的正交性来判断旋转方向,并通过脉冲频率来计算转速。本主题深入探讨了码盘测速点的应用,包括旋转方向判断、转速计算、零点参考、分辨率、噪声处理和速度补偿,对工业领域如电机控制、机器人定位等应用的性能优化至关重要。


















 1041
1041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









