






装配约束是建立相关零部件模型之间的位置关系。偏移量是选定两个零部件之间的距离,输入偏移量所需的值可以指定基准位置。
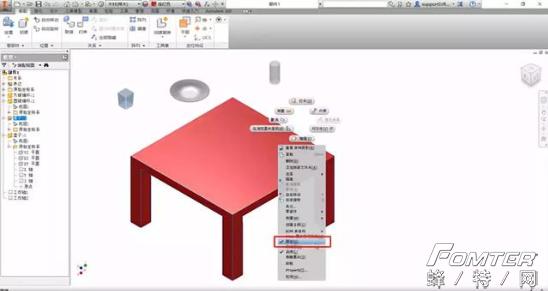
如下面图中所示,使用装配约束将方形杯子、圆形杯子和圆盘放置在方桌上的固定位置,通过配合约束指定偏移量就可以实现。

1.新建部件,进入装配环境,载入需要装配的所有零部件。将方桌固定,为其他零部件提供固定点。
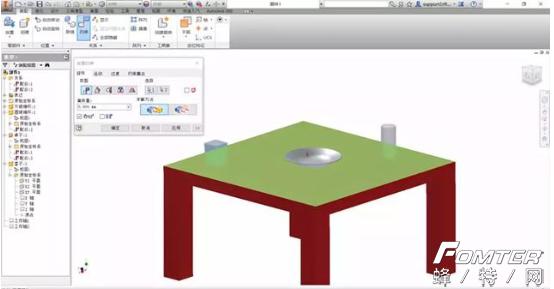
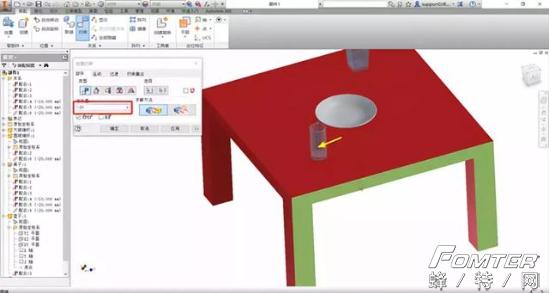
2.使用“配合”约束,选择杯子底平面和方桌表面,将杯子、盘子放置到桌子上。拖动杯子和盘子,将只能在方桌表面上移动。
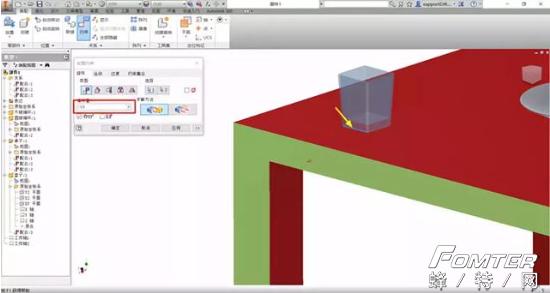
3.固定方形杯子,距离两侧桌边分别为10mm和20mm。使用“配合”约束,选择方形杯子底部的一条边和方桌侧面,在“偏移量”数值框中输入距离-10,方形杯子将放置在距离桌边10mm的地方。拖动方形杯子,将只能沿一个方向移动。
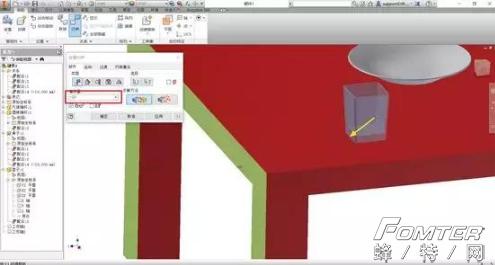
4.重复步骤3,选择方形杯子底部的另一边(与前一条边垂直)和方桌另一个侧面,在“偏移量”数值框中输入距离-20,方形杯子将被固定在距离桌边为10mm和20mm的地方。
5.固定圆形杯子,距离两侧桌边均为20mm。使用“配合”约束,选择圆形杯子外表面和方桌侧面,中心轴将与侧面对齐,在“偏移量”数值框中输入距离-20。同理,选择圆形杯子外表面和方桌另一个侧面,在“偏移量”数值框中输入距离-20。
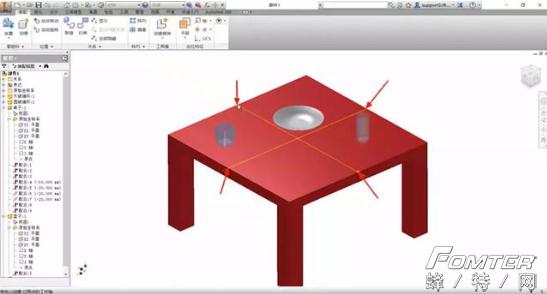
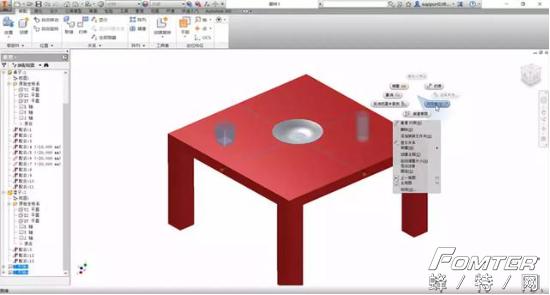
6.固定盘子,放置在方桌的中心。打开盘子和桌子的原始坐标系节点,观察三个原始坐标面,发现盘子的原始坐标面都经过零件的中心,而桌子的三个原始坐标面没有在零件的中心。所以,就需要创建辅助定位特征,便于将盘子装配到方桌的中心。在功能区选择“定位特征>轴>通过两点”,移动鼠标到桌边中点处,中点将显示为黄色圆点,选择桌子两对边的中点,创建两个工作轴。
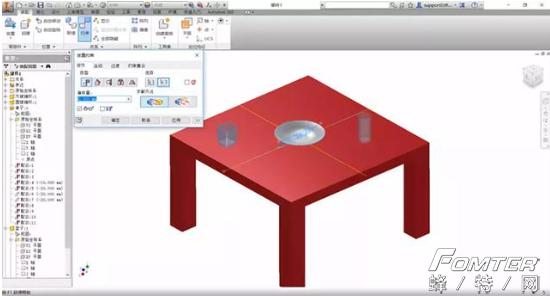
7.使用“配合”约束,分别选择盘子的坐标面与工作轴对齐,盘子将被固定在桌子的中心。
8.隐藏两个工作轴,完成装配。

















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









