






给自己的学习总结帖~~ 这里仅都是c语言 嵌入式相关代码第2季啊
一、高效解析不定长度的协议帧
通信设计中考虑协议的灵活性,经常把协议设计成“不定长度”。一个实例如下图:锐米LoRa终端的通信协议帧。
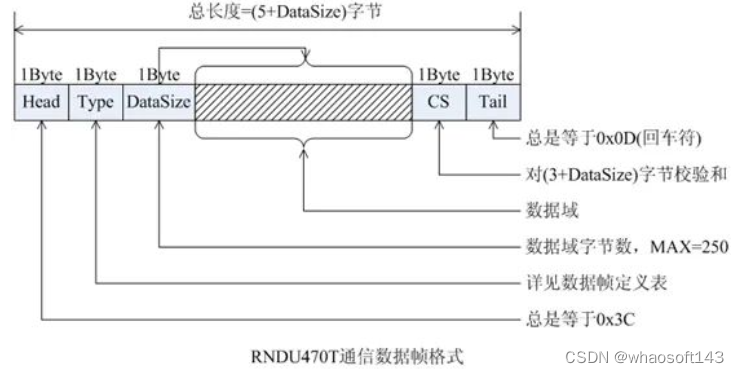
如果一个系统接收上述“不定长度”的协议帧,将会有一个挑战--如何高效接收与解析。 为简化系统设计,我们强烈建议您采用“状态机”来解析UART数据帧,并且把解析工作放在ISR(中断服务程序)完成,仅当接收到最后一个字节(0x0D)时,再将整个数据帧提交给进程处理。该解析状态机的原理如下图所示:
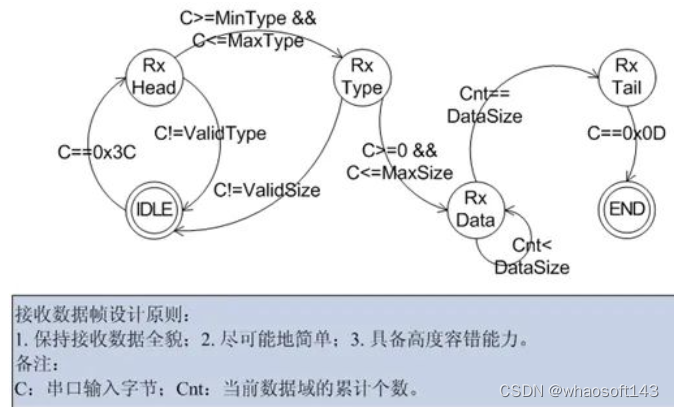
那么ISR处理这个状态机来得及吗?答案是:so easy!因为它只有3个动作,运算量十分小:
比较接收数据 -> 更新状态变量 -> 存储接收数据,C语言仅3条语句,翻译成机器指令也不超过10条。
代码清单如下:
二、按键的短按、长按检测
在电子产品中经常用到按键,尤其是经常需要MCU判断短按和长按这两种动作,本篇我们来专门聊下这个话题。
只谈理论太无聊,我们还是结合着实际应用来说明。例子默认的功能是蓝牙连接后不断的发送数据,从而不断的拍照。而实际中的遥控器通常是按一次按键,控制一次,我们在来实现该功能。
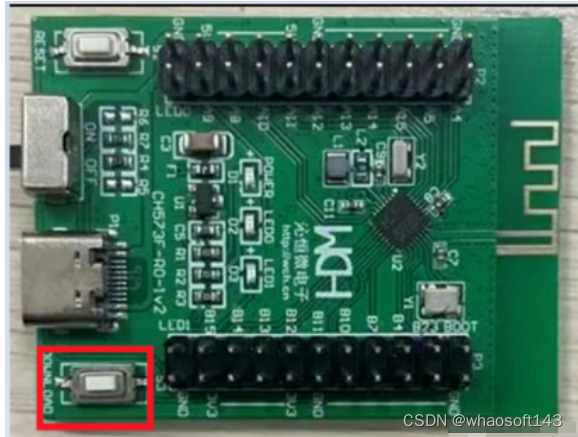
板子上只有两个按键,一个是RESET按键,一个是DOWNLOAD按键,我们使用DOWNLAOD按键,按键的一端接GND,另外一端接CH573的PB22引脚。
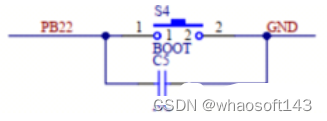
原理图中有一个NC的C5,但是实际板子上我却没有找到它,可能是版本不一致。
提前说明一下:CH573的代码里跑了TMOS(Task Management Operating System),可以理解为一个简单的操作系统,所以下面的代码一般的裸机代码看着略有不同,不过核心思想都是一样的,用在其他地方也很容易移植,只需要将其中的定时器部分改写即可。
最初我是这么做的,把PB22配置为上拉输入,开启下降沿中断,在中断服务函数里,启动一个事件,执行蓝牙发送。代码如下:
这么写能工作,但是有问题,就是经常会出现按一下误判为多次按下。原因大家应该都清楚,因为按键存在抖动,所以一次按下有可能进入多次进入中断。
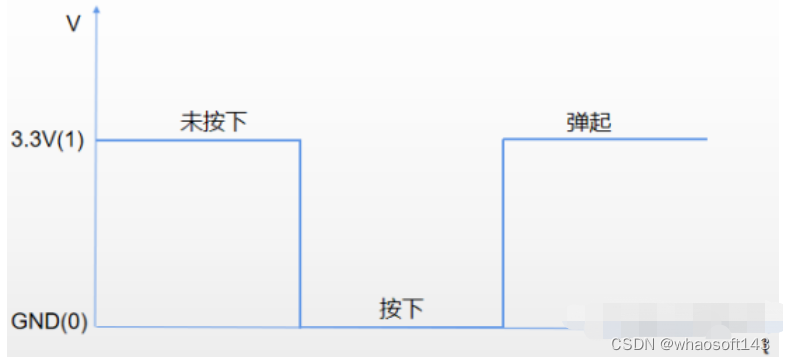
理想中的按下-弹起波形是这样的:
但是实际由于按键抖动的存在,实际的波形可能是这样的:
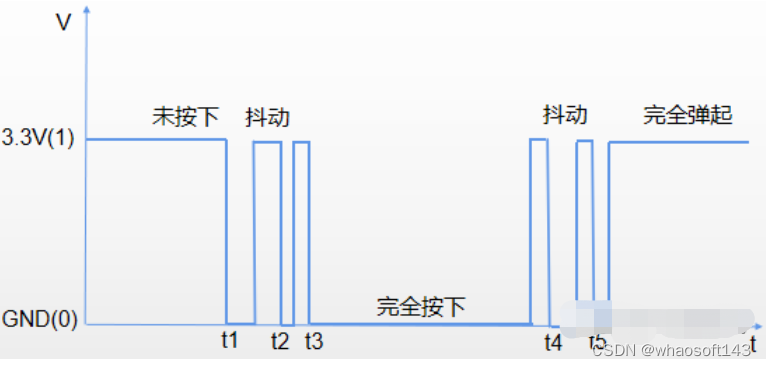
不信的话你可以接上示波器看看,或者软件验证,比如在GPIO中断服务函数里,设置一个全局变量,让它每次进入中断后加1,按按键观察这个变量的值。
那么该如何消除抖动呢?一种方法是硬件消抖,即按键两端并联一个小电容(电容大小由按键的机械特性来决定),另外一种方法是我们今天要重点介绍的软件消抖。
方法一:常用的加延时函数
在中断服务函数中加一个比如10ms的延时函数,延时时间的长短取决于实际所用的按键特性,只要延时时间比抖动时间略大即可。原理很简单,加了延时就避开了抖动的这段时间,在延时之后判断引脚电平,如果为低电平就表示是按下。
这个方法很简单,但是不好的地方是延时占用MCU资源。尤其是这里的BLE应用,在中断服务函数中执行时间长会引起蓝牙连接中断,所以这里不能这么用,我实际测试当按键按快一点就很容易引起蓝牙连接中断。
方法二:加定时器
它的原理和方法一类似,只不过是不在中断服务函数中阻塞等待,而是用一个定时器,代码如下:
它的逻辑是每次抖动的下降沿重新开启10ms定时器,在定时器时间到之后判断IO电平状态来判断按键是否按下。
需要注意的是:10ms定时器不是一个周期性的定时器,它是一次性的,即时间到了之后就停止计时了。另外每次进中断后先让定时器重新重头开始计时。如果大家用其他代码实现时要注意这两点。
此方法的好处不像加延时函数那样占用MCU资源。我实际测试这个方法可用,不会引起蓝牙连接中断。
以上介绍了使用中断的方式来判断按键短按,可以看到它判断的依据是按键按下(由高电平变到低电平)这个状态。下面在方法二的基础上我们来实现长按的检测,判断长按的依据是按下后持续的维持一段时间低电平。代码如下:
实现的逻辑是:当检测到短按时,再开启一个10ms定时器,在定时器到时之中判断电平状态,如果为低电平,就让cnt变量加1,否则cnt=0,当cnt>100,即低电平持续1s认为是长按。我在这里当判断到长按之后或者IO变高之后会停止掉这个定时器,否则周期定时,因为没必要一直开着定时器。
除了上述的中断方式,还可以使用轮询的方式来实现,代码如下:
上面的这段代码初次看着有点绕,但是看明白了之后会觉得这个实现逻辑还是挺好的,注释写了,这里不再详细解释了,我在多个项目里使用的都是它。它兼顾了去抖和短按/长按的检测,并且长按可以判断出长按按下/长按弹起。短按是检测到弹起时认为是短按动作。另外如果想同时支持多个长按,也很方便添加。
轮询和中断各有优缺点,大家可以根据实际情况来选择,你一般常用哪种方式呢?
三、单片机多任务事件驱动
单片机的ROM与RAM存贮空间有限,一般没有多线程可用,给复杂的单片机项目带来困扰。
经过多年的单片机项目实践,借鉴windows消息机制的思想,编写了单片机多任务事件驱动C代码,应用于单片机项目,无论复杂的项目,还是简单的项目,都可以达到优化代码架构的目的。
经过几轮的精简、优化,现在分享给大家。
代码分为3个模块:任务列表、事件列表、定时器列表。
任务列表创建一个全局列表管理任务,通过调用taskCreat()创建事件处理任务,创建成功返回任务ID,任务列表、事件列表与定时器列表通过任务ID关联。
事件列表创建一个全局循环列表管理事件,调用taskEventIssue()生成一个事件,放到事件循环列表,taskEventLoop()函数放到主线程循环调用,当事件循环列表中有事件时,根据任务ID分发到具体的事件处理任务。
定时器列表创建一个全局列表管理定时器,taskTimer()建立一个定时器,放到定时器列表执行,当定时时间到,会生成一个定时器事件,放到事件列表,分发到具体的事件处理任务。
四、嵌入式编程模板
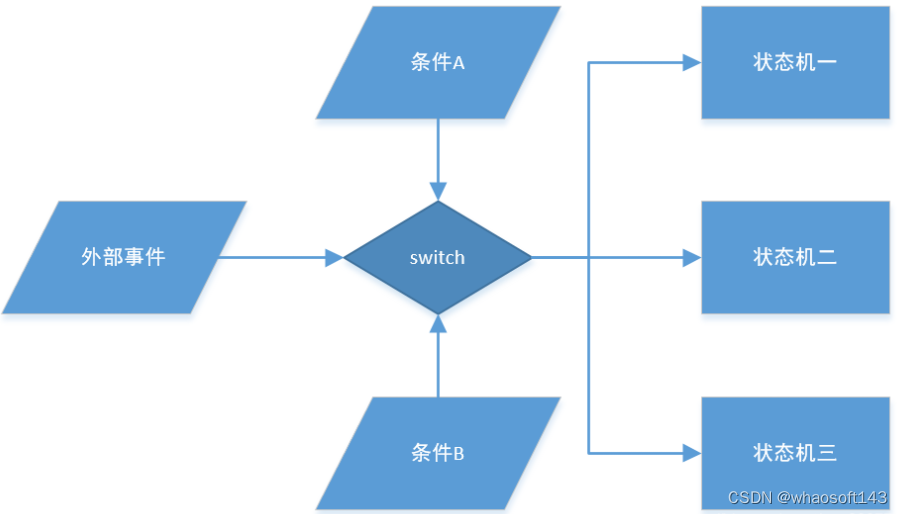
输入事件到状态机
对应:
(1)条件A:status_index_e
(2)条件B:event_index_e
(3)switch:
当一个外部事件来的时候(比如按键输入),通过一个全局的结构体变量(C语言中最常用的方法)引入当前的实时状态,由条件导向各种状态机。
这里的实现是通过二维数组即两个下标代表两个条件,两个条件的交点就是具体的状态机。
状态机到面向过程
以上实现的是“输入外部事件>>>>引流到>>>>状态机”
那如何实现“状态机>>>>执行>>>>具体地操作”呢?状态机有一个固定的执行流程(当然也有根据条件执行不同的运行流程的分支),其实这些个流程都是非常确定的执行过程。
在开发过程中的经验体现:就是对所有执行流程的精确完整的分析,然后将其全部罗列出来。“全部罗列出来”这个执行流程在程序中有两种体现方式:
1、把所有的执行流程以“空函数”的形式罗列出来。
2、把所有的执行流程以“函数指针”的形式罗列出来:
好处一:
可以把软件框架写出来,具体逻辑流程已经做好。
好处二:
具体的函数的接口可以先空着(NULL),待写好了函数就把函数名赋值给它(sys_api_func* = you_func ;)。
好处三:
通用性更高,逻辑性更强。
五、STM32中常用的C语言知识点
C语言是单片机开发中的必备基础知识,本文列举了部分STM32学习中会遇见的C语言基础知识点,希望能对大家有所帮助。
位操作
下面,我们先讲解几种位操作符,然后讲解位操作使用技巧。C语言支持如下6中位操作:
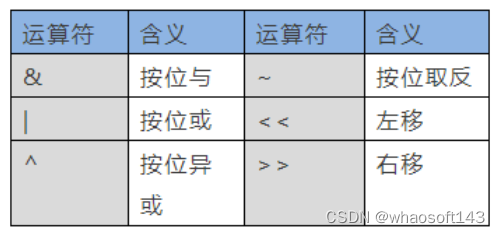
六种位操作
下面,我们想着重讲解位操作在单片机开发中的一些实用技巧。
1.在不改变其他位的值的状况下,对某几个位进行设值
这个场景在单片机开发中经常使用,方法就是先对需要设置的位用&操作符进行清零操作,然后用 | 操作符设值。
比如我要改变GPIOA的状态,可以先对寄存器的值进行&清零操作:
2. 移位操作提高代码的可读性
移位操作在单片机开发中非常重要,下面是delay_init函数的一行代码:
这个操作就是将CTRL寄存器的第1位(从0开始算起)设置为1,为什么要通过左移而不是直接设置一个固定的值呢?
其实这是为了提高代码的可读性以及可重用性。这行代码可以很直观明了的知道,是将第1位设置为1。如果写成:
SysTick->CTRL |= 0X0002;
这个虽然也能实现同样的效果,但是可读性稍差,而且修改也比较麻烦。
3. 按位取反操作使用技巧
按位取反在设置寄存器的时候经常被使用,常用于清除某一个/某几个位。下面是delay_us函数的一行代码:
SysTick->CTRL &= ~(1 << 0) ; /* 关闭SYSTICK */
该代码可以解读为 仅设置CTRL寄存器的第0位(最低位)为0,其他位的值保持不变。
同样我们也不使用按位取反,将代码写成:
SysTick->CTRL &= 0XFFFFFFFE; /* 关闭SYSTICK */
可见前者的可读性,及可维护性都要比后者好很多。
4. 按位异或操作使用技巧
该功能非常适合用于控制某个位翻转,常见的应用场景就是控制LED闪烁,如:
GPIOB->ODR ^= 1 << 5;
执行一次该代码,就会使PB5的输出状态翻转一次,如果我们的LED接在PB5上,就可以看到LED闪烁了。
define宏定义
define是C语言中的预处理命令,它用于宏定义(定义的是常量),可以提高源代码的可读性,为编程提供方便。常见的格式:

定义标识符HSE_VALUE的值为8000000,数字后的U表示unsigned的意思。
至于define宏定义的其他一些知识,比如宏定义带参数这里我们就不多讲解。
ifdef条件编译
单片机程序开发过程中,经常会遇到一种情况,当满足某条件时对一组语句进行编译,而当条件不满足时则编译另一组语句。
条件编译命令最常见的形式为:
#ifdef 标识符 程序段1#else 程序段2#endif
它的作用是:当标识符已经被定义过(一般是用#define命令定义),则对程序段1进行编译,否则编译程序段2。其中#else部分也可以没有,即:
#ifdef 程序段1 #endif
条件编译在HAL库里面是用得很多,在stm32mp1xx_hal_conf.h这个头文件中经常会看到这样的语句:
#if !defined (HSE_VALUE) #define HSE_VALUE 24000000U #endif
如果没有定义HSE_VALUE这个宏,则定义HSE_VALUE宏,并且HSE_VALUE的值为24000000U。条件编译也是C语言的基础知识吧。
这里提一下,24000000U中的U表示无符号整型,常见的,UL表示无符号长整型,F表示浮点型。
这里加了U以后,系统编译时就不进行类型检查,直接以U的形式把值赋给某个对应的内存,如果超出定义变量的范围,则截取。
extern变量申明
C语言中extern可以置于变量或者函数前,以表示变量或者函数的定义在别的文件中,提示编译器遇到此变量和函数时在其他模块中寻找其定义。
这里面要注意,对于extern申明变量可以多次,但定义只有一次。在我们的代码中你会看到看到这样的语句:
extern uint16_t g_usart_rx_sta;
这个语句是申明g_usart_rx_sta变量在其他文件中已经定义了,在这里要使用到。
所以,你肯定可以找到在某个地方有变量定义的语句:
uint16_t g_usart_rx_sta;
extern的使用比较简单,但是也会经常用到,需要掌握。
typedef类型别名
typedef用于为现有类型创建一个新的名字,或称为类型别名,用来简化变量的定义。typedef在HAL库用得最多的就是定义结构体的类型别名和枚举类型了。
struct _GPIO { __IO uint32_t CRL; __IO uint32_t CRH; … };
定义了一个结构体GPIO,这样我们定义结构体变量的方式为:
struct _GPIO gpiox; /* 定义结构体变量gpiox */
但这样很繁琐,HAL库中有很多这样的结构体变量需要定义。这里我们可以为结体定义一个别名GPIO_TypeDef,这样我们就可以在其他地方通过别名GPIO_TypeDef来定义结构体变量了,方法如下:
Typedef为结构体定义了一个别名GPIO_TypeDef,这样我们可以通过GPIO_TypeDef来定义结构体变量:GPIO_TypeDef gpiox;
这里的GPIO_TypeDef就跟struct _GPIO是等同的作用了,但是GPIO_TypeDef使用起来方便很多。















 8929
8929

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









