







 本文详细介绍使用OpenCV对游戏帧进行预处理的方法,包括图片灰度化、非游戏区域剪切、图片缩放至84*84,以及如何初始化和迭代state,通过叠加连续的4帧图片来提取游戏角色的移动趋势特征。
本文详细介绍使用OpenCV对游戏帧进行预处理的方法,包括图片灰度化、非游戏区域剪切、图片缩放至84*84,以及如何初始化和迭代state,通过叠加连续的4帧图片来提取游戏角色的移动趋势特征。
帧图片处理 openCV
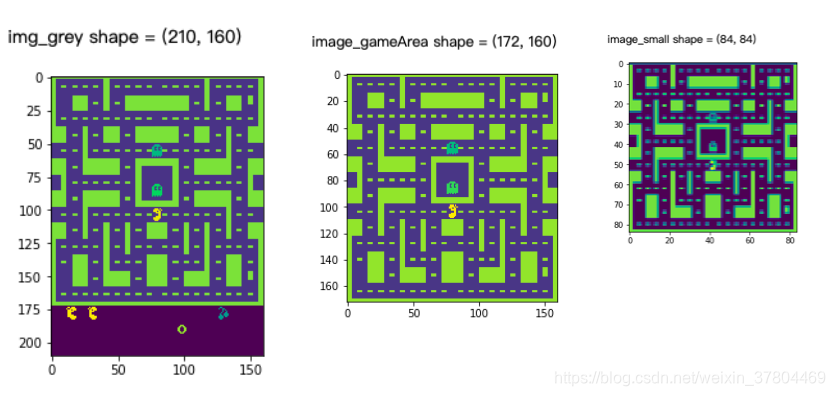
step1.图片灰度处理
图片灰度处理后,三通道(RGB) ===>> 单通道
两种方式:
- 常用的公式对三通道进行处理:ray = R0.299 + G0.587 + B*0.114
- openCV 直接灰度处理:img_grey=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
step2.图片剪切,减去非游戏区域
step3.缩小图片至84*84
#别问我图片为什么不灰
import gym
import time
import cv2
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
#chage the image size from 210*160*3 to 84*84
#change the RGB image into grey image
def preprocess(obs):
img = obs.astype(np.float32)
#step1: a common formula converting converting RGB images into gray images:
#ray = R*0.299 + G*0.587 + B*0.114
img_grey = img[:, :, 0] * 0.299 + img[:, :, 1] * 0.587 + img[:, :, 2] * 0.114 #shape = (210,160,1)
#img_grey=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
print('img_grey shape =', np.shape(img_grey))
plt.imshow(img_grey)
plt.show()
#step2: Crop out the non-game area of the image
image_gameArea = img_grey[0:172,:] #shape = (172,160,1)
print('image_gameArea shape =', np.shape(image_gameArea))
plt.imshow(image_gameArea)
plt.show()
#step3: reduce the scale of the picture into 84*84
image_small = cv2.resize(image_gameArea, (84, 84), interpolation=cv2.INTER_AREA) # shape(84,84)
print('image_small shape =', np.shape(image_small))
plt.imshow(image_small)
plt.show()
state的初始化和迭代
设置定义:
observation:一帧图片
state: state是最近的、连续的4帧图片叠加。
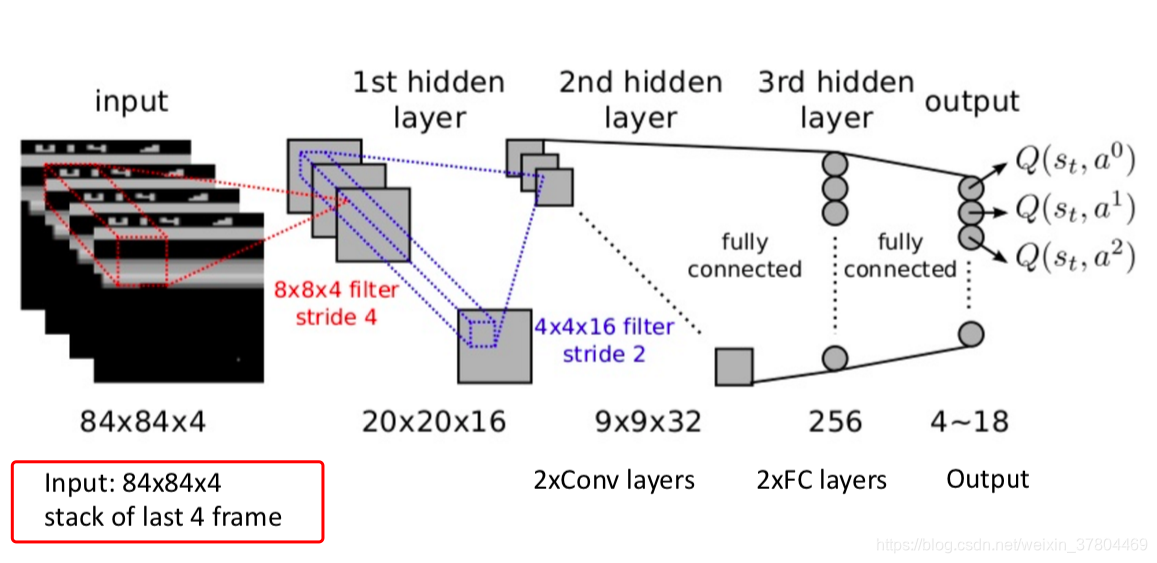
为什么要叠加4帧图片呢?因为有的游戏需要提取移动趋势特征,比如有两帧相同的图片(相同的observation),游戏角色在相同的位置,但是运动趋势不一样,一个是从左往右移动到这个位置,一个是从右往左移动到这个位置,提取游戏角色的移动趋势特征更有利于训练出准确的动作预测。
由上图可见,state会做为CNN的输入,经过多层卷集处理,输出是各个action对应的Q-value.后面文章会详细说明。
当刚加载游戏时,游戏处于第一帧图片时,这时自然是没有前3帧,怎么办呢?把这一帧图片复制4份叠加。
def init_state(self, obs):
x = self.preprocess(obs)
state_initial = np.stack((x, x, x, x), axis=0) # shape(4, 84, 84)
#print('shape_ state_initial =', np.shape(state_initial))
return state_initial
之后就不断迭代state:
在每做完一个动作后,会产生reward和next observation,把这个observation添加进state,然后最老的那个observation剔除出去,组成next state
def next_state(self, state, obs):
x = self.preprocess(obs)
#state = np.reshape(state, (4,84,84))
next_state = np.append(state[1:, :, :], np.expand_dims(x, 0), axis=0) # shape(4, 84, 84)
#print('shape_next_state =', np.shape(next_state))
return next_state
用于经验回放 的经验库的初始化 replay experience initialization
经验回放之后的文章会介绍,这里先说经验数据需要哪些字段
如果你学过Q-learning(Reinforcement Learning 的一种方式), 你就会知道在其学习过程中,会需要: state, action, reward, next_state,这里也一样(就是多个个游戏是否结束的状态done)。
当然一样啦,因为经验回放就是用于Deep Q-learning Network 的学习的。
for epis in range(experience):
action = env.action_space.sample()
obs, reward, done, _ = env.step(action)
next_state = state_update(state,obs) #shape_next_state = (4, 84, 84)
memory.append((state, action, reward, next_state, done))
附上完整代码,可以跑的那种
import gym
import time
import cv2
import torch
import torch.nn as nn
import numpy as np
from collections import deque
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
#chage the image size from 210*160*3 to 84*84
#change the RGB image into grey image
def preprocess(obs):
img = obs.astype(np.float32)
# a common formula converting converting RGB images into gray images: ray = R*0.299 + G*0.587 + B*0.114
img_grey = img[:, :, 0] * 0.299 + img[:, :, 1] * 0.587 + img[:, :, 2] * 0.114 #shape = (210,160,1)
#print('img_grey shape =', np.shape(img_grey))
#plt.imshow(img_grey)
#plt.show()
#Crop out the non-game area of the image
image_gameArea = resized_screen = img_grey[0:172,:] #shape = (172,160,1)
#print('image_gameArea shape =', np.shape(image_gameArea))
#plt.imshow(image_gameArea)
#plt.show()
#reduce the scale of the picture into 84*84
image_small = cv2.resize(image_gameArea, (84, 84), interpolation=cv2.INTER_AREA) # shape(84,84)
#print('image_small shape =', np.shape(image_small))
#plt.imshow(image_small)
#plt.show()
return image_small.astype(np.float32) / 255.0
def init_state(obs):
x = preprocess(obs)
state_initial = np.stack((x, x, x, x), axis=0) # shape(4, 84, 84)
#print('shape_ state_initial =', np.shape(state_initial))
return state_initial
def state_update(state, obs):
x = preprocess(obs)
#state = np.reshape(state, (4,84,84))
next_state = np.append(state[1:, :, :], np.expand_dims(x, 0), axis=0) # shape(4, 84, 84)
#print('shape_next_state =', np.shape(next_state))
return next_state
experience = 1000
memory = deque(maxlen=experience)
env = gym.make('MsPacman-v0')
#print(env.observation_space)
obs = env.reset()
state = init_state(obs)
#print('state =', np.shape(state))
for epis in range(experience):
action = env.action_space.sample()
obs, reward, done, _ = env.step(action)
next_state = state_update(state,obs) #shape_next_state = (4, 84, 84)
memory.append((state, action, reward, next_state, done))
if done:
print('done')
obs = env.reset()
state = init_state(obs)
else:
state = next_state
time.sleep(0.05) # sleep for 1 second to observe the whole process
env.render()
env.close()


















 374
374

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











