







一. 线程模型
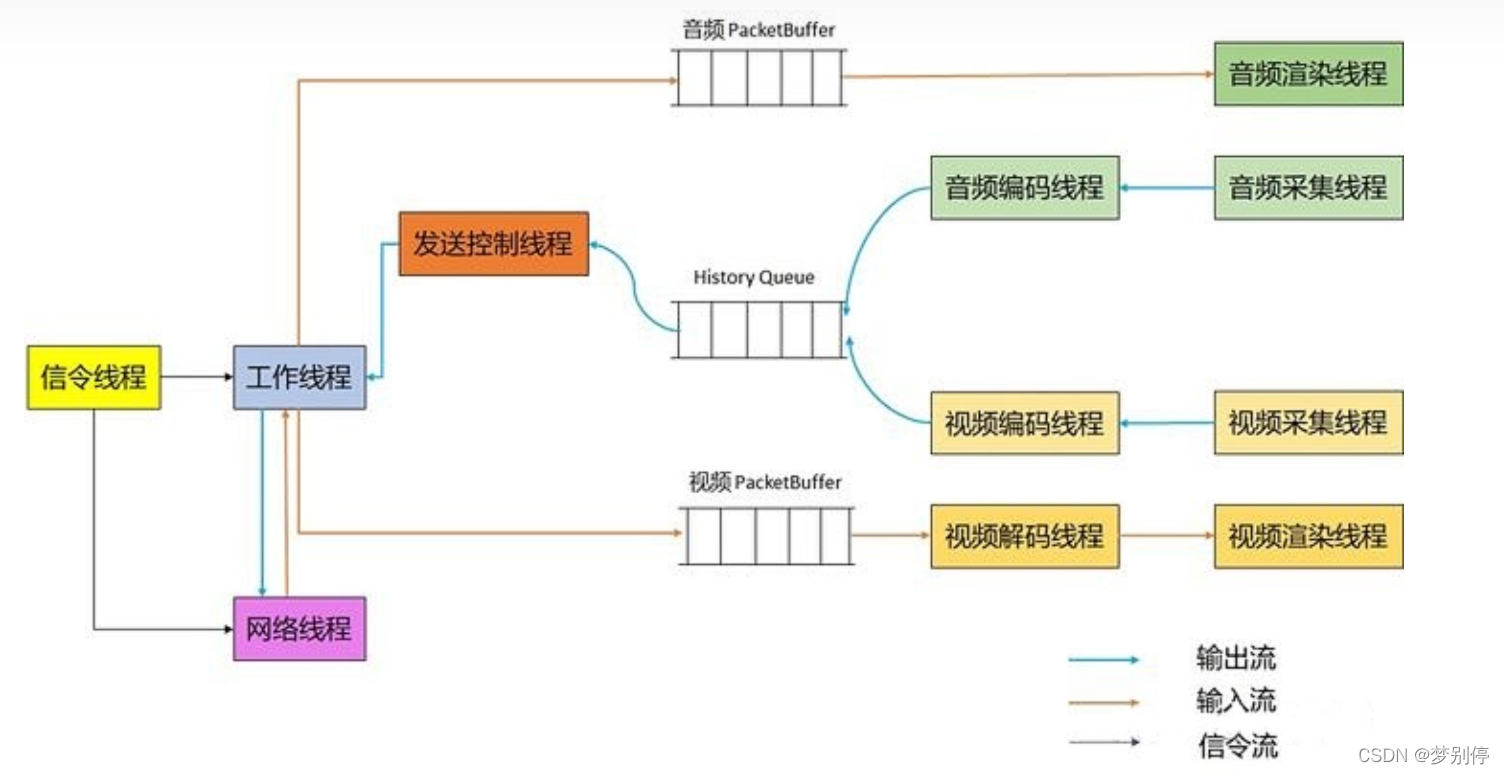
WebRTC 有三类线程:信令线程,网络线程,工作线程。
信令线程一般工作在 PeerConnection 层,它负责与应用层交互,例如 createOffer,createAnswer 等操作,并通知工作线程和网络线程相应的信号事件。
网络线程工作在网络传输层,它负责网络收发包,从网络接收包数据并发送给工作线程,工作线程也会把要发送的包数据给网络线程。
工作线程工作在媒体引擎层(engine),包含视频采集线程,视频渲染线程,视频编码线程,视频解码线程等。
二. 线程创建与启动
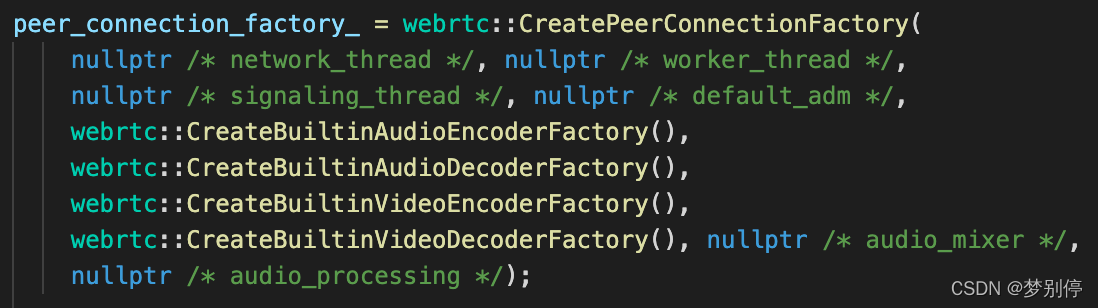
使用 webrtc::CreatePeerConnectionFactory 创建 PeerConnectionFactoryInterface 时有 network_thread,worker_thread,signaling_thread 参数可以让我们指定使用的 Thread 对象,当传递 nullptr 时表示希望函数内部帮助我们创建并启动对应的线程。
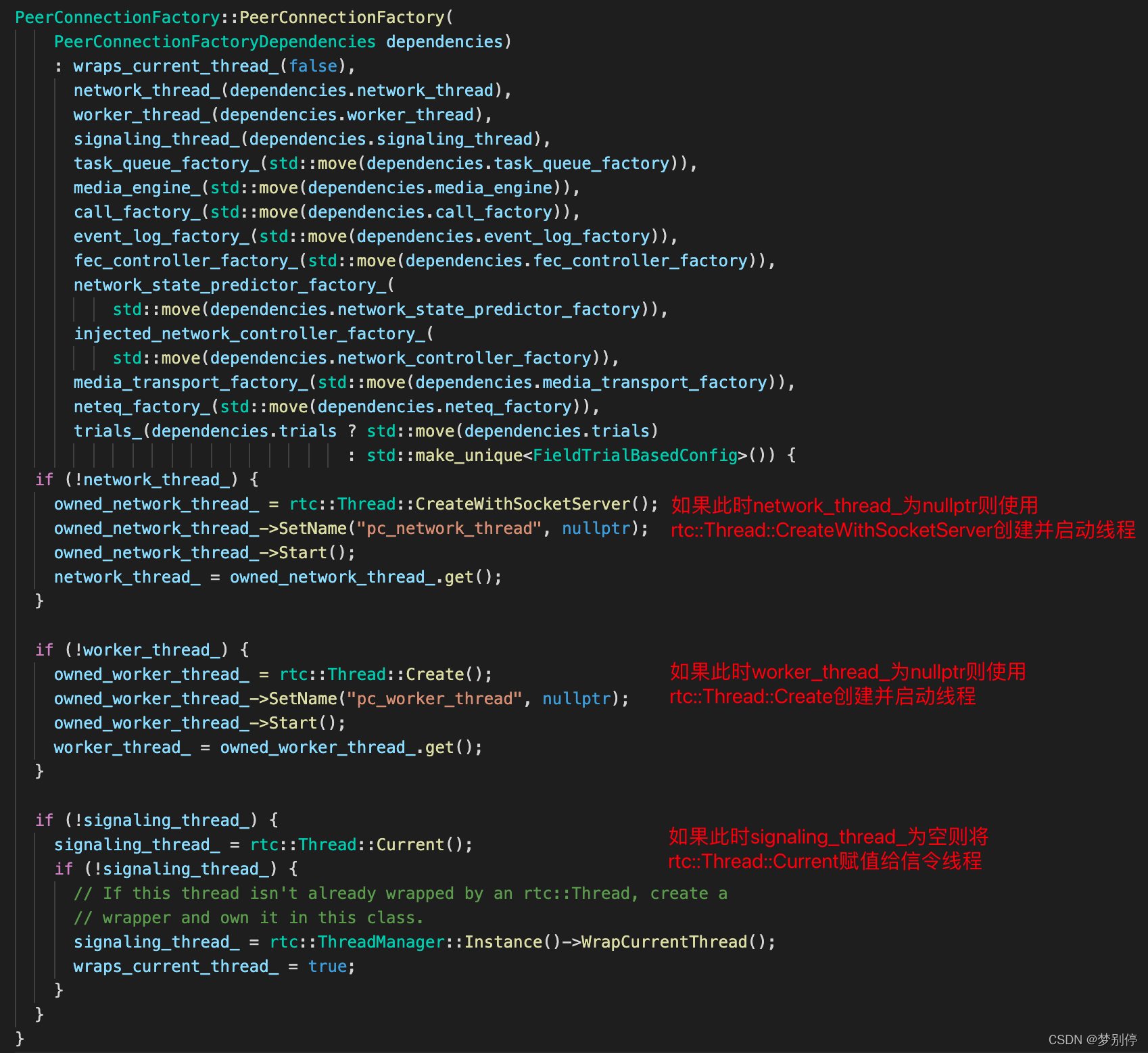
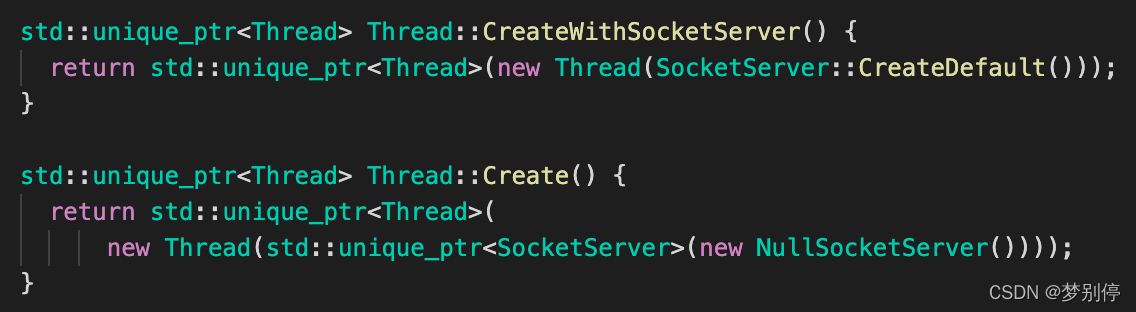
如果传入的 network_thread 为空则使用 rtc::Thread::CreateWithSocketServer() 创建 Thread 对象,如果传入的 worker_thread 为空则使用 rtc::Thread::Create() 创建 Thread 对象,如果传入的 signaling_thread 为空则使用 rtc::Thread::Current() 对其进行赋值。
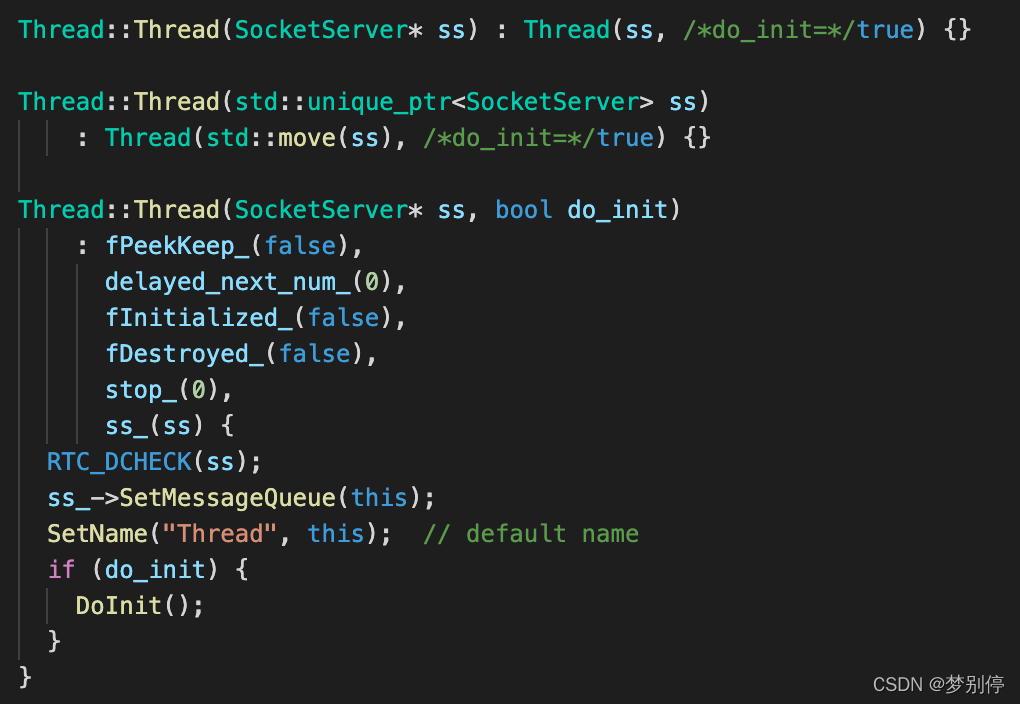
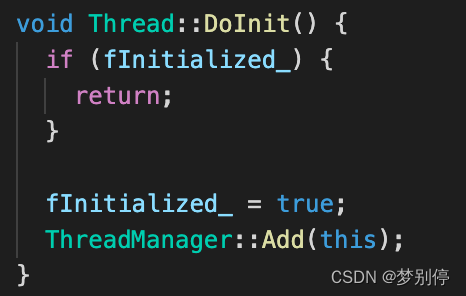
Thread 构造函数逻辑主要是将该 Thread 对象添加到 ThreadManager 中进行管理。
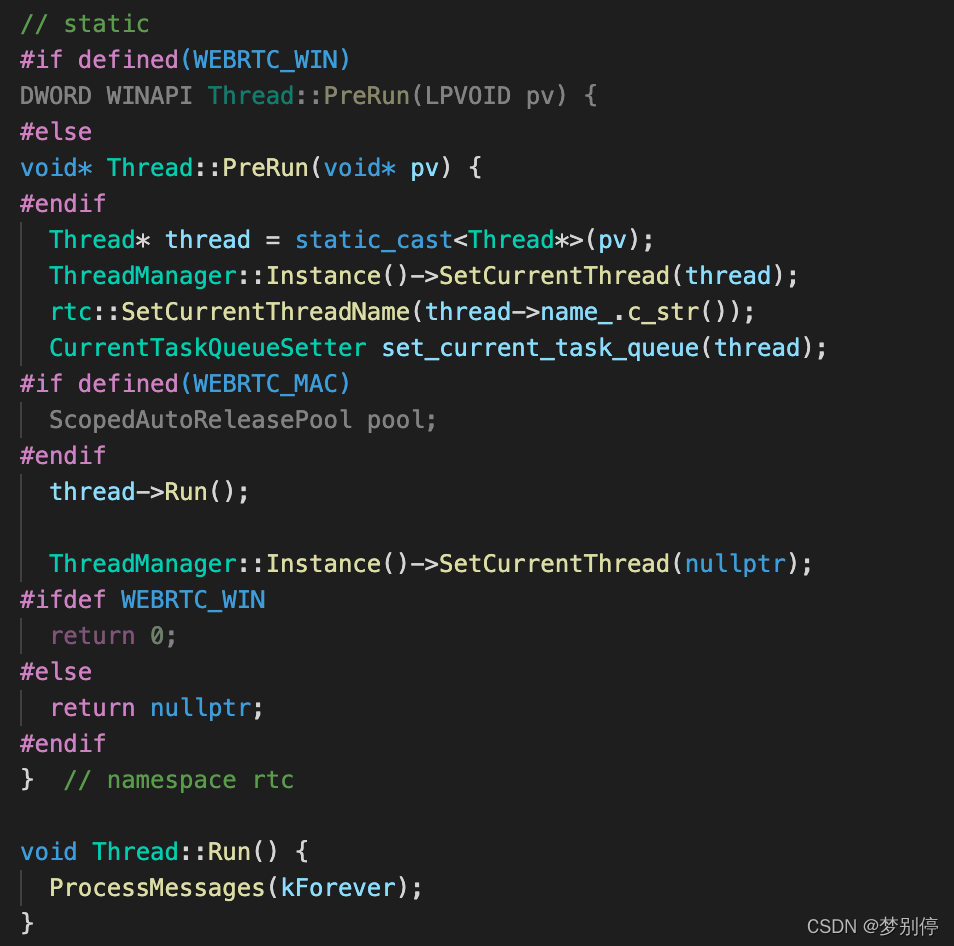
线程创建与启动逻辑如下,对于 Windows 使用 CreateThread 创建线程,对于使用 POSIX 方式的系统则使用 pthread_create 创建线程,线程创建后都运行 PreRun 函数。
bool Thread::Start() {
RTC_DCHECK(!IsRunning());
if (IsRunning())
return false;
Restart(); // reset IsQuitting() if the thread is being restarted
// Make sure that ThreadManager is created on the main thread before
// we start a new thread.
ThreadManager::Instance();
owned_ = true;
#if defined(WEBRTC_WIN)
thread_ = CreateThread(nullptr, 0, PreRun, this, 0, &thread_id_);
if (!thread_) {
return false;
}
#elif defined(WEBRTC_POSIX)
pthread_attr_t attr;
pthread_attr_init(&attr);
int error_code = pthread_create(&thread_, &attr, PreRun, this);
if (0 != error_code) {
RTC_LOG(LS_ERROR) << "Unable to create pthread, error " << error_code;
thread_ = 0;
return false;
}
RTC_DCHECK(thread_);
#endif
return true;
}Thread::PreRun 主要的逻辑为 thread->Run(),该函数调用 ProcessMessages 从 Thread 对象里的 messages_ 取出消息并进行处理,不同的线程接收不同的消息处理,消息处理逻辑由 MessageHandler::OnMessage 定义。


三. 线程管理
在线程创建与启动我们可以看到,WebRTC 是通过 Thread 对象来管理某一个具体线程,通过 ThreadManager 对象管理多个线程。
Thread 类重要的方法和成员如下。
class RTC_LOCKABLE RTC_EXPORT Thread : public webrtc::TaskQueueBase {
// Get() will process I/O until:
// 1) A message is available (returns true)
// 2) cmsWait seconds have elapsed (returns false)
// 3) Stop() is called (returns false)
virtual bool Get(Message* pmsg,
int cmsWait = kForever,
bool process_io = true);
virtual bool Peek(Message* pmsg, int cmsWait = 0);
// |time_sensitive| is deprecated and should always be false.
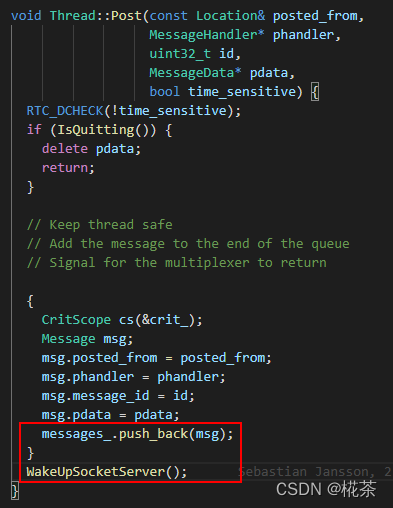
virtual void Post(const Location& posted_from,
MessageHandler* phandler,
uint32_t id = 0,
MessageData* pdata = nullptr,
bool time_sensitive = false);
virtual void PostDelayed(const Location& posted_from,
int delay_ms,
MessageHandler* phandler,
uint32_t id = 0,
MessageData* pdata = nullptr);
virtual void PostAt(const Location& posted_from,
int64_t run_at_ms,
MessageHandler* phandler,
uint32_t id = 0,
MessageData* pdata = nullptr);
virtual void Clear(MessageHandler* phandler,
uint32_t id = MQID_ANY,
MessageList* removed = nullptr);
virtual void Dispatch(Message* pmsg);
// Amount of time until the next message can be retrieved
virtual int GetDelay();
bool fPeekKeep_;
Message msgPeek_;
MessageList messages_ RTC_GUARDED_BY(crit_);
PriorityQueue delayed_messages_ RTC_GUARDED_BY(crit_);
uint32_t delayed_next_num_ RTC_GUARDED_BY(crit_);
CriticalSection crit_;
bool fInitialized_;
bool fDestroyed_;
volatile int stop_;
// The SocketServer might not be owned by Thread.
SocketServer* const ss_;
// Used if SocketServer ownership lies with |this|.
std::unique_ptr<SocketServer> own_ss_;
std::string name_;
}ThreadManager 重要的方法与成员如下。ThreadManager 实现为单例模式,通过 Instance() 获取唯一实例。
class RTC_EXPORT ThreadManager {
public:
static const int kForever = -1;
// Singleton, constructor and destructor are private.
static ThreadManager* Instance();
static void Add(Thread* message_queue);
static void Remove(Thread* message_queue);
static void Clear(MessageHandler* handler);
// TODO(nisse): Delete alias, as soon as downstream code is updated.
static void ProcessAllMessageQueues() { ProcessAllMessageQueuesForTesting(); }
// For testing purposes, for use with a simulated clock.
// Ensures that all message queues have processed delayed messages
// up until the current point in time.
static void ProcessAllMessageQueuesForTesting();
Thread* CurrentThread();
void SetCurrentThread(Thread* thread);
// Allows changing the current thread, this is intended for tests where we
// want to simulate multiple threads running on a single physical thread.
void ChangeCurrentThreadForTest(Thread* thread);
// Returns a thread object with its thread_ ivar set
// to whatever the OS uses to represent the thread.
// If there already *is* a Thread object corresponding to this thread,
// this method will return that. Otherwise it creates a new Thread
// object whose wrapped() method will return true, and whose
// handle will, on Win32, be opened with only synchronization privileges -
// if you need more privilegs, rather than changing this method, please
// write additional code to adjust the privileges, or call a different
// factory method of your own devising, because this one gets used in
// unexpected contexts (like inside browser plugins) and it would be a
// shame to break it. It is also conceivable on Win32 that we won't even
// be able to get synchronization privileges, in which case the result
// will have a null handle.
Thread* WrapCurrentThread();
void UnwrapCurrentThread();
bool IsMainThread();
#if RTC_DCHECK_IS_ON
// Registers that a Send operation is to be performed between |source| and
// |target|, while checking that this does not cause a send cycle that could
// potentially cause a deadlock.
void RegisterSendAndCheckForCycles(Thread* source, Thread* target);
#endif
private:
ThreadManager();
~ThreadManager();
void SetCurrentThreadInternal(Thread* thread);
void AddInternal(Thread* message_queue);
void RemoveInternal(Thread* message_queue);
void ClearInternal(MessageHandler* handler);
void ProcessAllMessageQueuesInternal();
#if RTC_DCHECK_IS_ON
void RemoveFromSendGraph(Thread* thread) RTC_EXCLUSIVE_LOCKS_REQUIRED(crit_);
#endif
// This list contains all live Threads.
std::vector<Thread*> message_queues_ RTC_GUARDED_BY(crit_);
// Methods that don't modify the list of message queues may be called in a
// re-entrant fashion. "processing_" keeps track of the depth of re-entrant
// calls.
CriticalSection crit_;
size_t processing_ RTC_GUARDED_BY(crit_) = 0;
#if RTC_DCHECK_IS_ON
// Represents all thread seand actions by storing all send targets per thread.
// This is used by RegisterSendAndCheckForCycles. This graph has no cycles
// since we will trigger a CHECK failure if a cycle is introduced.
std::map<Thread*, std::set<Thread*>> send_graph_ RTC_GUARDED_BY(crit_);
#endif
#if defined(WEBRTC_POSIX)
pthread_key_t key_;
#endif
#if defined(WEBRTC_WIN)
const DWORD key_;
#endif
// The thread to potentially autowrap.
const PlatformThreadRef main_thread_ref_;
RTC_DISALLOW_COPY_AND_ASSIGN(ThreadManager);
};四. 线程事件处理
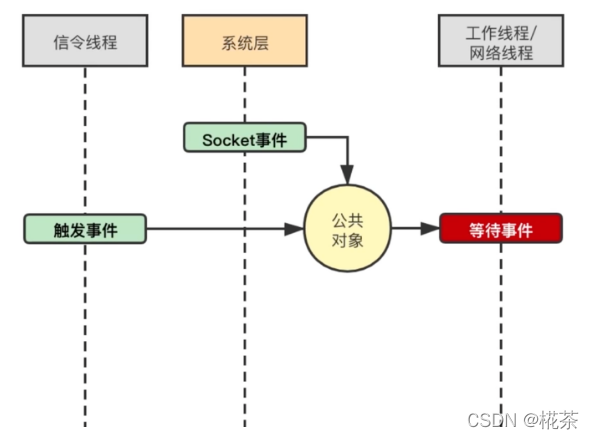
以信令线程与工作线程/网络线程的事件通知处理逻辑为例,信令线程触发事件通知公共对象,工作线程/网络线程等待该公共对象事件然后执行相应的处理逻辑。
WebRTC 有两个事件处理类,NullSocketServer 用于处理不包含 socket 事件的事件,PhysicalSocketServer 用于处理包含了 socket 事件的事件,网络线程创建时使用了 PhysicalSocketServer,信令线程和工作线程则使用 NullSocketServer。
owned_network_thread_ = rtc::Thread::CreateWithSocketServer();
owned_worker_thread_ = rtc::Thread::Create();
signaling_thread_ = rtc::Thread::Current();NullSocketServer
WebRTC 处理普通事件的类是 NullSocketServer,该类包含一个 Event。
class RTC_EXPORT NullSocketServer : public SocketServer {
public:
NullSocketServer();
~NullSocketServer() override;
bool Wait(int cms, bool process_io) override;
void WakeUp() override;
Socket* CreateSocket(int family, int type) override;
AsyncSocket* CreateAsyncSocket(int family, int type) override;
private:
Event event_;
};Windows 平台下事件涉及的 API:CreateEvent 创建事件句柄,WaitForSingleObject 等待事件,SetEvent 触发事件,ResetEvent 重置事件。
Event::Event(bool manual_reset, bool initially_signaled) {
event_handle_ = ::CreateEvent(nullptr, // Security attributes.
manual_reset, initially_signaled,
nullptr); // Name.
RTC_CHECK(event_handle_);
}
Event::~Event() {
CloseHandle(event_handle_);
}
void Event::Set() {
SetEvent(event_handle_);
}
void Event::Reset() {
ResetEvent(event_handle_);
}
bool Event::Wait(const int give_up_after_ms, int /*warn_after_ms*/) {
ScopedYieldPolicy::YieldExecution();
const DWORD ms = give_up_after_ms == kForever ? INFINITE : give_up_after_ms;
return (WaitForSingleObject(event_handle_, ms) == WAIT_OBJECT_0);
}PhysicalSocketServer
WebRTC 处理包含 socket 事件的事件的类是 PhysicalSocketServer,该类包含一个 WSAEvent,这种事件可以与 socket 进行绑定。
class RTC_EXPORT PhysicalSocketServer : public SocketServer {
public:
PhysicalSocketServer();
~PhysicalSocketServer() override;
// SocketFactory:
Socket* CreateSocket(int family, int type) override;
AsyncSocket* CreateAsyncSocket(int family, int type) override;
// Internal Factory for Accept (virtual so it can be overwritten in tests).
virtual AsyncSocket* WrapSocket(SOCKET s);
// SocketServer:
bool Wait(int cms, bool process_io) override;
void WakeUp() override;
void Add(Dispatcher* dispatcher);
void Remove(Dispatcher* dispatcher);
void Update(Dispatcher* dispatcher);
private:
typedef std::set<Dispatcher*> DispatcherSet;
void AddRemovePendingDispatchers();
// 省略...
DispatcherSet dispatchers_;
DispatcherSet pending_add_dispatchers_;
DispatcherSet pending_remove_dispatchers_;
bool processing_dispatchers_ = false;
Signaler* signal_wakeup_;
CriticalSection crit_;
#if defined(WEBRTC_WIN)
const WSAEVENT socket_ev_;
#endif
bool fWait_;
};Windows 平台下事件涉及的 API:WSACreateEvent 创建事件句柄,WSAWaitForMultipleEvent 等待事件,WSASetEvent 触发事件,WSAResetEvent 重置事件,WSAEventSelect 将 socket 与事件绑定,WSAEnumNetworkEvents 枚举发生事件的 socket。
事件的触发
等待事件的线程调用相应 SocketServer 的 Wait 函数后开始等待事件,而其他线程需要调用通知该线程事件并唤醒,举例说明线程间事件的通知与触发。
如下调用 worker_thread_->Invoke 通知 worker 线程执行匿名函数的函数体。
if (media_engine_) {
initialized_ = worker_thread_->Invoke<bool>(
RTC_FROM_HERE, [&] { return media_engine_->Init(); });
RTC_DCHECK(initialized_);
} else {
initialized_ = true;
}template <
class ReturnT,
typename = typename std::enable_if<!std::is_void<ReturnT>::value>::type>
ReturnT Invoke(const Location& posted_from, FunctionView<ReturnT()> functor) {
ReturnT result;
InvokeInternal(posted_from, [functor, &result] { result = functor(); });
return result;
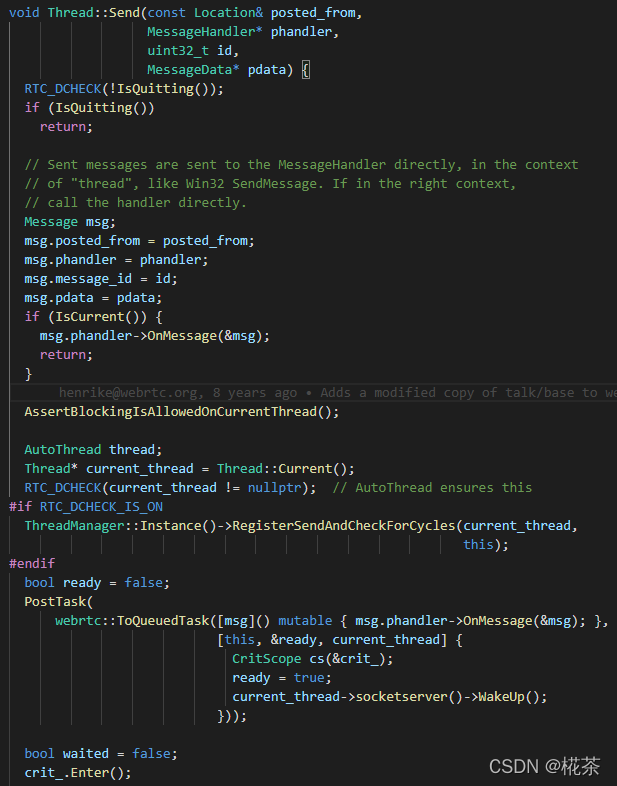
}Invoke 函数会调用线程的 Send 函数构造一个 Message 对象,其中 Message.phandler 为消息对应的执行函数,Message.pdata 为函数参数,再调用 PostTask 将消息存放到该线程的 messages_ 中,最后调用 WakeUpSocketServer 唤醒该线程,如果此时该线程处于 Wait 状态则会被唤醒,然后拿到 message 并执行相应的函数体。
void Thread::InvokeInternal(const Location& posted_from,
rtc::FunctionView<void()> functor) {
TRACE_EVENT2("webrtc", "Thread::Invoke", "src_file", posted_from.file_name(),
"src_func", posted_from.function_name());
class FunctorMessageHandler : public MessageHandler {
public:
explicit FunctorMessageHandler(rtc::FunctionView<void()> functor)
: functor_(functor) {}
void OnMessage(Message* msg) override { functor_(); }
private:
rtc::FunctionView<void()> functor_;
} handler(functor);
Send(posted_from, &handler);
}


















 718
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











