






一、PID功能块截图图
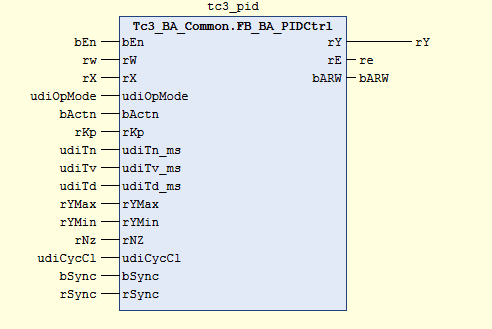
二、输入引脚功能
bEn- 功能:使能信号,置为
TRUE时激活 PID 功能块运行,FALSE时停止计算(输出可保持或复位,取决于内部逻辑)。
- 功能:使能信号,置为
rw- 功能:设定值(Setpoint),即 PID 控制的目标值。例如控制温度时,此为目标温度值。
rX- 功能:过程变量(Process Value),实际反馈值。如温度传感器测量的当前温度。
udiOpMode- 功能:操作模式选择(如自动、手动、初始化等)。不同模式下功能块行为不同,例如自动模式下根据误差计算输出,手动模式可直接设定输出。
bActn- 功能:作用方向(正作用 / 反作用)。正作用时,误差(
rw - rX)增大则输出增大;反作用时,误差增大输出减小。
- 功能:作用方向(正作用 / 反作用)。正作用时,误差(
rKp- 功能:比例增益,决定比例环节对误差的放大作用。增大可加快响应,但过大会导致超调。
udiTn_ms- 功能:积分时间(单位:毫秒),积分环节累积误差的时间常数。减小可加快消除稳态误差,但过小易引发振荡。
udiTv_ms- 功能:微分时间(单位:毫秒),微分环节预测误差变化趋势,适当增大可抑制超调,但过大会放大噪声。
udiTd_ms- 功能:微分阻尼时间(单位:毫秒),过滤微分环节的高频噪声,使微分作用更平稳。
rYMax- 功能:输出最大值限制,防止 PID 输出超过执行机构(如阀门、电机)的上限。
rYMin- 功能:输出最小值限制,防止 PID 输出低于执行机构的下限。
rNz- 功能:与初始状态或零点相关(具体需结合项目逻辑,可能用于初始化参数)。
udiCycCl- 功能:功能块循环周期(单位:毫秒),需与 PLC 扫描周期匹配,确保 PID 计算时序准确。
bSync- 功能:同步信号,用于触发功能块内部状态重置或多模块同步。
rSync- 功能:同步相关参数(如同步值或触发条件,具体需结合项目逻辑)。
三、输出引脚功能
rY- 功能:PID 计算后的输出值,用于驱动执行机构(如调节阀门开度、电机转速)。
rE- 功能:误差值,即
rE = rw - rX,反映设定值与实际值的偏差。
- 功能:误差值,即
bARW- 功能:抗积分饱和标志。当输出(
rY)达到rYMax或rYMin限制时,防止积分环节继续累积,避免积分饱和。
- 功能:抗积分饱和标志。当输出(
四、详细用法
- 使能功能块:将
bEn置为TRUE,启动 PID 控制运算。 - 设定目标与反馈:通过
rw输入目标值,将实际反馈值接入rX。 - 调整控制参数:
- 根据被控对象特性调节
rKp(如温度控制rKp较小,压力控制rKp较大)。 - 结合系统响应调整
udiTn_ms(积分时间)和udiTv_ms(微分时间),例如超调大时增大udiTn_ms或减小rKp。 - 设置
rYMax和rYMin,匹配执行机构工作范围。
- 根据被控对象特性调节
- 选择操作模式:通过
udiOpMode选择模式(如自动模式下功能块自动调节,手动模式可直接赋值给rY)。 - 监控与处理输出:利用
rY控制执行机构,通过rE监控误差,依据bARW判断是否出现积分饱和并调整参数。 - 同步与周期配置:确保
udiCycCl与 PLC 扫描周期一致,bSync和rSync用于特殊同步需求(如多控制器协同)。
通过合理配置上述引脚,可实现对温度、压力、流量等物理量的精准控制,具体参数需结合实际被控对象特性反复调试优化。
五、附录
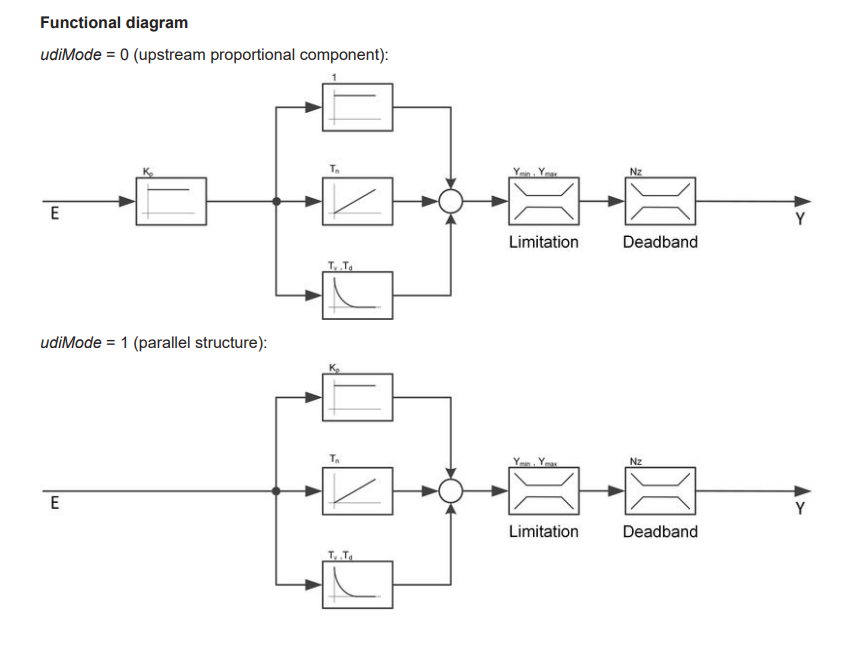
1、功能块框图
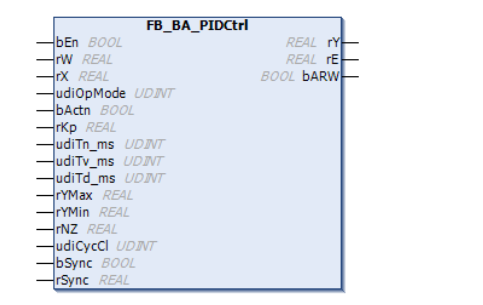
2、功能块输入输出参数类型描述



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











