







以下内容是对下面几篇文章的学习总结:
https://blog.csdn.net/mapupcal/article/details/80030643#to_do
https://blog.csdn.net/mahabharata_/article/details/69099136
https://blog.csdn.net/DdogYuan/article/details/80554873
前言
智能剪刀算法(Intelligent Scissors)是由Eric N. Mortensen和William A. Barrett于1995年提出来的一种图像分割的交互算法,可以用于2D图像分割,该算法可以用于辅助用户精确地勾勒出感兴趣的区域。在运行时它快速地定位到该图像区域的边缘上,通过与用户交互,更精确地完成整个感兴趣区域的勾画、分割。
论文地址:
Intelligent Scissors for Image Composition
https://courses.cs.washington.edu/courses/csep576/15sp/readings/mort-sigg95.pdf
Interactive segmentation with intelligent scissors
效果:(图片来自论文)

算法原理
要点:
①将图像转换成一个庞大的加权有向图。
②在运行时,通过特定的寻路算法,在出发点[a]开始,寻找一条最优路径,该路径通往用户指定的目标点[b]。
将图像变成一个庞大的加权有向图:
① 图像中每个像素,在加权有向图中都将成为该图中的一个结点Node。
② 相邻的像素,互相之间存在一条加权有向边。
③ 确定每条加权有向边的权重。
前提设定
初始点(seedpoint)
对于下文中所有用到的p与q的意义:
p表示图中的中心结点,q指与p相邻的结点。
对于某一个非边界像素p,其有八个邻居像素,如:

当转换成加权有向图之后,就变成如下这个样子:
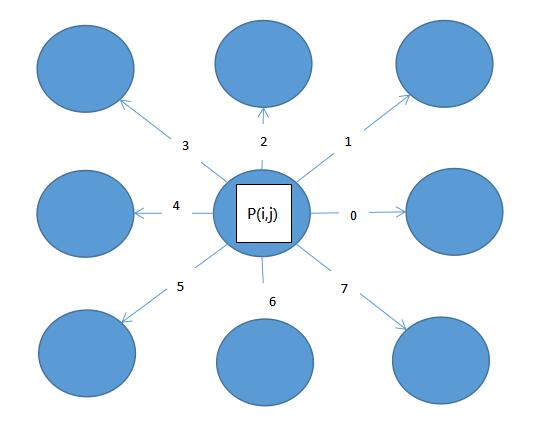
上图中的3,2,1,4,0,7,5,6,7表示的是对应的邻域到seed point的代价,需要注意的是,我们在计算过程会得到邻域到seed point的local host(下文会详细介绍local host),如下图所示,q像素点上的值表示它到p像素点的local host。
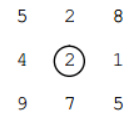
图1-local host
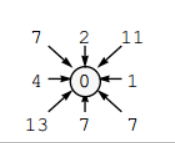
图2-代价
对比图一与图二,我们可以知道,邻域到seed point的local host 与邻域到seed point的代价之间的转换关系是:
1.seed point本身的local cost(图1中的2)没有任何作用
2.邻域到seed point的代价不是local costs相减,如果是正左/右/上/下 方的点,邻域到seed point的代价=邻域到seed point的local host(如图中正右方的点到seed point的代价为1),如果是就是对角线上的像素,邻域到seed point的代价=根号2*邻域到seed point的local host
下文中公式用到的符号:
拉普拉斯交叉零点值 Fz(q)
像素点梯度值 Fg(q)
像素点梯度方向 Fd(p,q)
像素值 Fp(q)
“内部”像素值 Fi(q)
“外部”像素值 Fo(q)
论文的思路:
论文中的代价与边缘特征有关,边缘特征越明显的像素点,代价越低,所以我们要通过计算代价,去找最小代价路径,这样便使得最小代价路径总是会去“贴合”图像的边缘。
那么论文中的代价是怎么定义的呢?
注:以下只介绍第一篇论文中的local costs描述,在第二篇中作者又考虑了另外三项,有兴趣的读者可以自行阅读
代价Local Costs描述
我们称之前提到的代价为local costs,论文一中,Local Costs由三个图像特征组成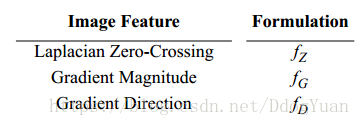
local costs通过这三个Image Feature的权重合得到:
其中最为重要的是fG,即图像的梯度幅值。
fG的实现
设图像像素坐标为(x,y)处的梯度幅值为M(x,y),有:
使用sobleFilter,其最小的3X3模版使用以z5为中心的一个3X3领域对gx和gy的近似如下式所示:
梯度幅值越大,意味着具有更多的边缘特征,在前面的建模中提到边缘特征意味着路径代价低,故f(G)应该这样设置:
实现了fG之后就可以看到明显的效果,建议先实现f(G)再慢慢补充fZ和fD。fZ和fD的具体实现可以参考论文,其作用分别是使得曲线更加贴合边缘和更加平滑。
fZ的实现
fZ是拉普拉斯零交(Laplacian Zero-Crossing)带来的代价,拉普拉斯算子的卷积就是原图像素二维导数,表示的图像一维导数变化的速率。拉普拉斯算子卷积为0的地方意味着该点是一维导数变化的极值点,其变化速率最快,我们认为这是边缘的特征,故其代价应该较低。我们将拉普拉斯算子卷积为0的地方的代价设为0,不为0的地方设为1。
特殊处理
由于拉普拉斯算子卷积刚好为0的地方极少,所以我们需要特殊处理以增多代价为0的点。
我们认为,当两个临近像素出现异号时,其中间肯定有卷积为0的位置,但是由于像素是离散的,我们设卷积值离0近的像素的代价为0,这样就增多了代价为0的点,使得拉普拉斯零交特征的影响增大。
fD的实现
意义
fD是为了使得边缘平滑,实现平滑的方式是通过为剧烈变化的边界方向设置较高的代价。
实现方法
设D(p)为某个像素点的梯度方向(Ix,Iy),其中Ix和Iy分别为图像在x方向和y方向上的梯度,D’(p)为(Iy,-Ix),与D(p)正交。设L(p,q)为p到q的单位向量。fD的详尽计算公式参考论文。
示例如下
算法流程描述
(a)
下图(a)描述了各个像素点的local costs,(a)中画圈的local cost为2的像素点代表着seed point,设其为S
设置seed point后,计算图像所有像素到该点的代价,其过程如(b) (c) (d)所示:

(b)
第一步,计算S的邻域(8个像素点)到S的代价,注意对照(a),S本身的local cost为2没有任何作用,因为S到自身的代价为0(这不是废话嘛。。。),邻域到S的代价不是local costs相减(例如S的左边像素自身的local costs为4,它到S的代价不是4-2,而是4),还有就是对角线上的像素到S的代价是其自身的local cost乘上了根号2,这是因为对角线的长度比直线长度长。
(c)
第二步,选取当前代价最低的路径(回忆Dijkstra算法)(a)中此时的路径只有其邻域到S的路径,其右方邻域像素N1到S的代价最低,标记N1:它要到达seed point,就走它的左邻域,这样可以使得总代价最小。
其中,N1的代价指的是便是N1到seed point的代价和。
然后计算N1的邻域到N1的代价,N1的邻域的代价不仅仅是其local cost的值,还要加上N1自身的代价(这样才是总代价)。观察下(b)图中S的右上方邻域像素(其 local cost为11)N2,对照©,发现其箭头指向了N1,并且其代价值更新为了9,这是因为在第二步中,计算得到N2的代价为8+1 = 9,它比原来8*根号2 = 11要小,故需要进行更新。
更新意味着,N2此时知道自己要去到seed point的最小代价路径是走下方而不是左下方直接去seed point,这里也需要一个标记动作。(类似前面标记N1)
一次expand
以上两步可以称为一次expand
下一次expand也是类似,选取当前代价最低的路径,例如下一次expand应该选取的是S的上方像素(可以看到,是从全局来选取)


















 2534
2534

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











