







 本文详细介绍了Houdini中的VEX语言如何处理矩阵,包括创建不同类型的矩阵、矩阵声明、单位矩阵、行列式与逆矩阵计算、转置矩阵、矩阵与标量、矩阵相乘、与向量相乘以及在变换如旋转、缩放和位移中的应用。同时,文章还探讨了矩阵的组合变换顺序和解构,以及实例化的应用。
本文详细介绍了Houdini中的VEX语言如何处理矩阵,包括创建不同类型的矩阵、矩阵声明、单位矩阵、行列式与逆矩阵计算、转置矩阵、矩阵与标量、矩阵相乘、与向量相乘以及在变换如旋转、缩放和位移中的应用。同时,文章还探讨了矩阵的组合变换顺序和解构,以及实例化的应用。
原视频:https://www.youtube.com/playlist?list=PLzRzqTjuGIDhiXsP0hN3qBxAZ6lkVfGDI
Bili:Houdini最强VEX算法教程 - VEX for Algorithmic Design_哔哩哔哩_bilibili
Houdini版本:19.5 如有错误,请指正,Thansks.
原理推导略微复杂,非必要不要去深究。感兴趣的可以去看看线性代数-UP主汉语配音-【线性代数的本质】合集-转载于3Blue1Brown官方双语】_哔哩哔哩_bilibili
1、矩阵类型
Houdini中有三种矩阵类型:2x2矩阵(2D旋转)、3X3矩阵(3D旋转)、4X4矩阵(平移、旋转、缩放),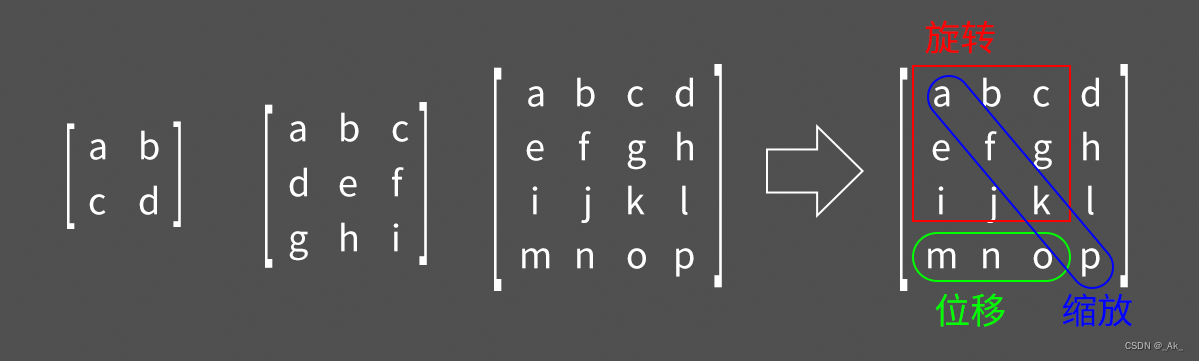
eg.可在类型为detail的AttributeWrangle节点输入以下代码,创建不同的矩阵:
matrix2 mat2 = set(1,2,3,4);
matrix3 mat3 = set(1,2,3,4,5,6,7,8,9);
matrix mat4 = set(1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16);
2@mat2 = mat2;
3@mat3 = mat3;
4@mat4 = mat4; 结果为:
2、矩阵声明
使用大括号 { } 时不能使用变量。
eg.可在类型为detail的AttributeWrangle节点输入以下代码,体验矩阵声明的方法:
float val = 1.0;
matrix mat1 = set(val,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16);
matrix mat2 = {1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16};
matrix mat3 = {{1,2,3,4},{5,6,7,8},{9,10,11,12},{13,14,15,16}};
matrix mat4 = set(set(val,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
4@mat1 = mat1;
4@mat2 = mat2;
4@mat3 = mat3;
4@mat4 = mat4;结果:
3、单位矩阵
单位矩阵:仅对角线为1 ,其它为0,它的值=1。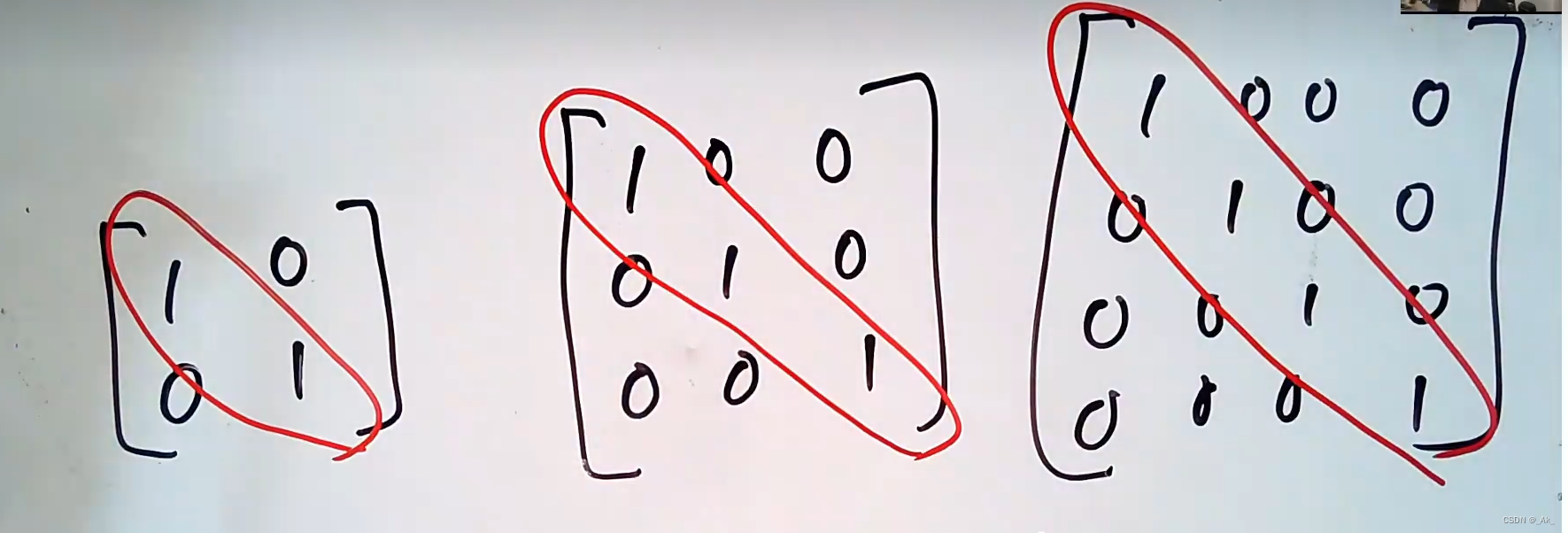
eg.可在类型为detail的AttributeWrangle节点输入以下代码创建单位矩阵:
matrix2 mat2 = ident();
matrix3 mat3 = ident();
matrix mat4 = ident();
2@mat2 = mat2;
3@mat3 = mat3;
4@mat = mat4;结果为:
4、行列式与逆矩阵
①2x2矩阵,用下面公式计算它的值,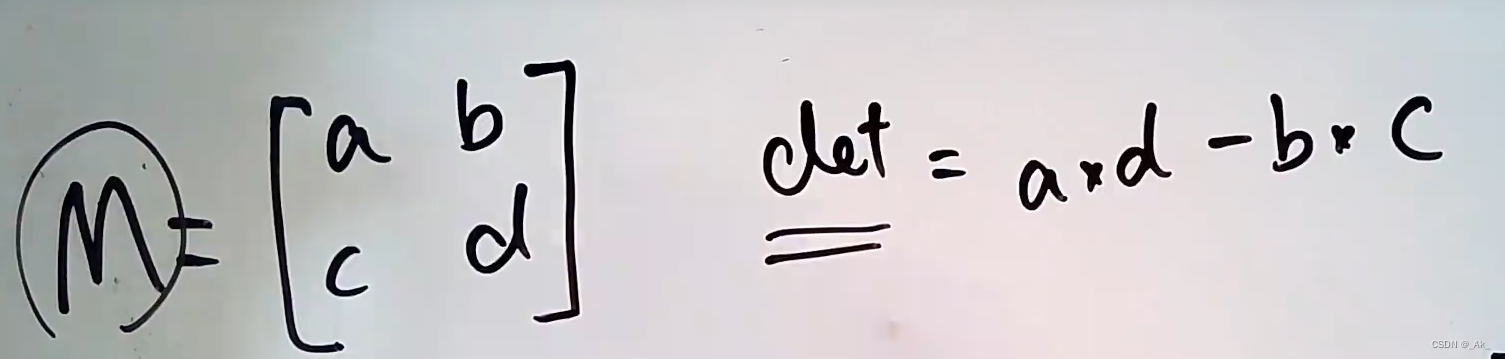
如果值=0,表示该矩阵无逆矩阵,如≠0,表示该矩阵有逆矩阵。
矩阵与逆矩阵相乘,等于单位矩阵,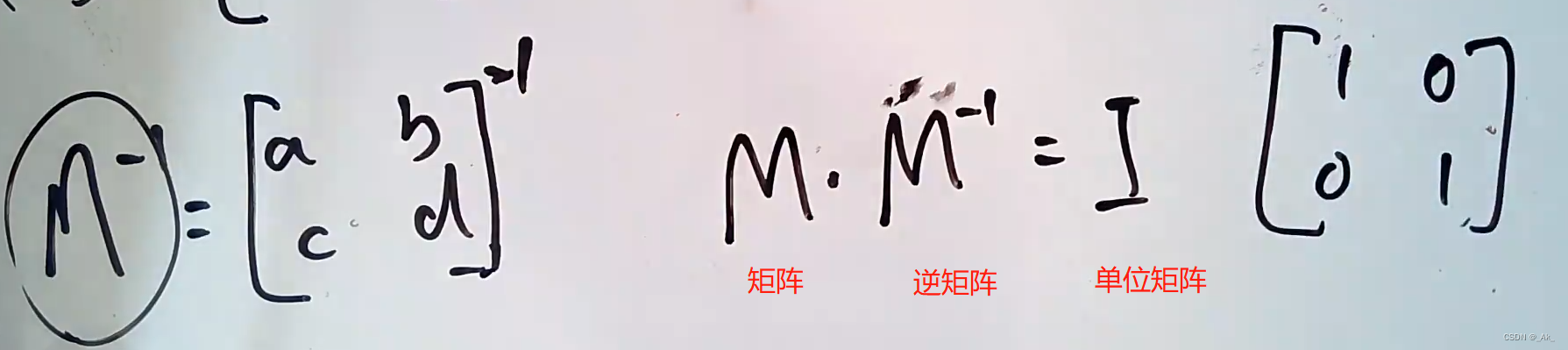
②3x3矩阵,可用下面方法计算它的行列式值,即对角线上的元素相乘,红色相加的和 减去 蓝色相加的和,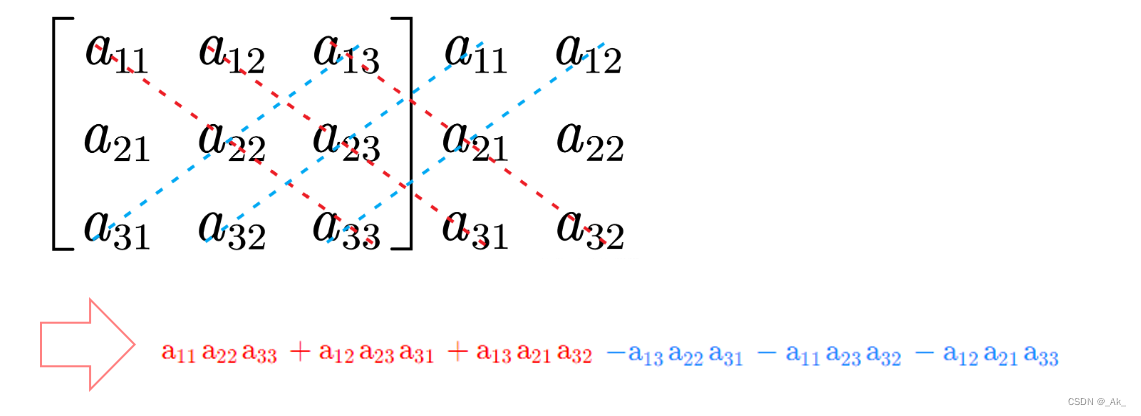
③4X4矩阵与3x3矩阵相似。
eg.逆矩阵函数 invert(matrix) 、行列式计算函数determinant(matrix):
可在类型为detail的AttributeWrangle节点输入以下代码,体验逆矩阵函数、行列式函数,
matrix mat = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
matrix imat = invert(mat); //转为逆矩阵
float det = determinant(mat); //矩阵行列式值
matrix mat2 = set(set(3,2,3,20),set(5,11,7,8),set(9,10,11,12),set(3,14,15,16));
matrix imat2 = invert(mat2); //转为逆矩阵
float det2 = determinant(mat2); //矩阵行列式值
f@det = det; //如果值为0,该矩阵没有逆矩阵
f@det2 = det2; //如果值不为0,该矩阵有逆矩阵
matrix cmat = mat * imat; //矩阵与逆矩阵相乘
4@cmat = cmat;
matrix cmat2 = mat2 * imat2; //矩阵与逆矩阵相乘
4@cmat2 = cmat2; //值接近单位矩阵5、转置矩阵
将矩阵的行、列置换得到新的矩阵,即转置矩阵。常用于投影…等更复杂的转换。
对矩阵A进行转置,可得:如下图所示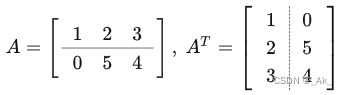
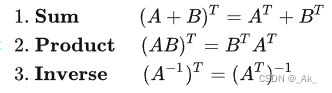
转置矩阵的性质:和、点乘、逆矩阵
eg.可在类型为detail的AttributeWrangle节点输入以下代码,
matrix mat = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
4@mat = mat;
4@tmat = transpose(mat); //将矩阵行列置换 结果为:![]()
6.、矩阵与标量乘法运算
矩阵乘法主要有3种,矩阵与标量(float)相乘、矩阵与矩阵相乘、矩阵与向量相乘。
下面是Multiplication with Saclar与标量相乘: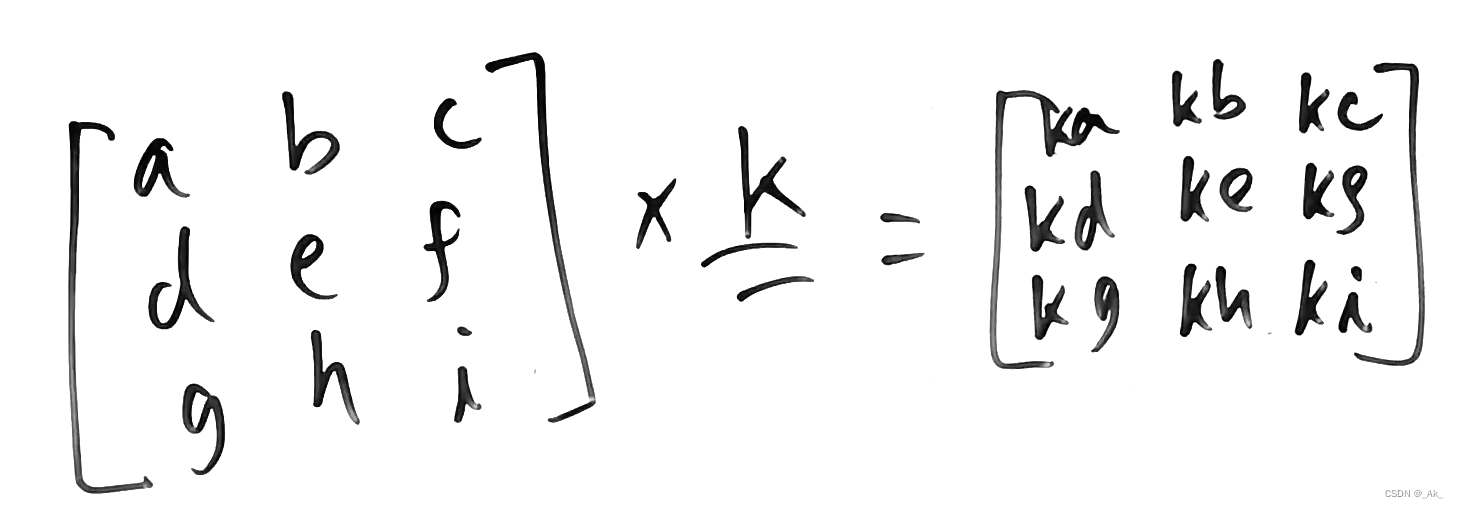
eg.可在类型为detail的AttributeWrangle节点输入以下代码,
matrix mat = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
mat = mat * 2.0; // mat = mat * chf('num');
4@mat = mat; //结果:略7、与矩阵相乘
如前所述,矩阵包含位置、旋转、缩放等信息,相乘顺序不同,结果也不同。因为在移动、旋转、缩放的变换中,物体变换中心点是以(0, 0, 0)为变换中心,懂?(在Houdini中,矩阵与向量相乘,顺序不影响结果)。
①相同行列矩阵相乘:
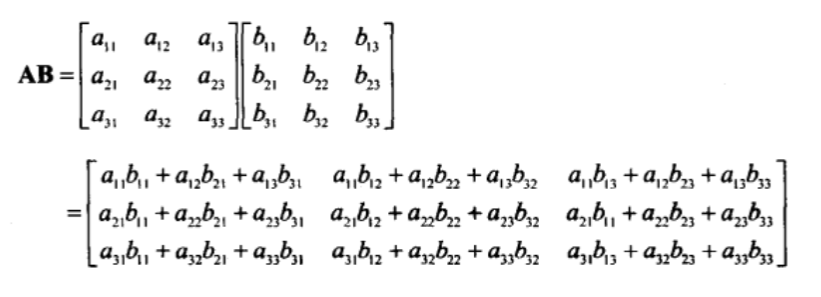
②非相同行列矩阵相乘,左边矩阵行数为新矩阵行数,右边矩阵列数为新矩阵列数;
在Houdini中,2x3矩阵、3x2矩阵没有任何函数或定义,仅作理解
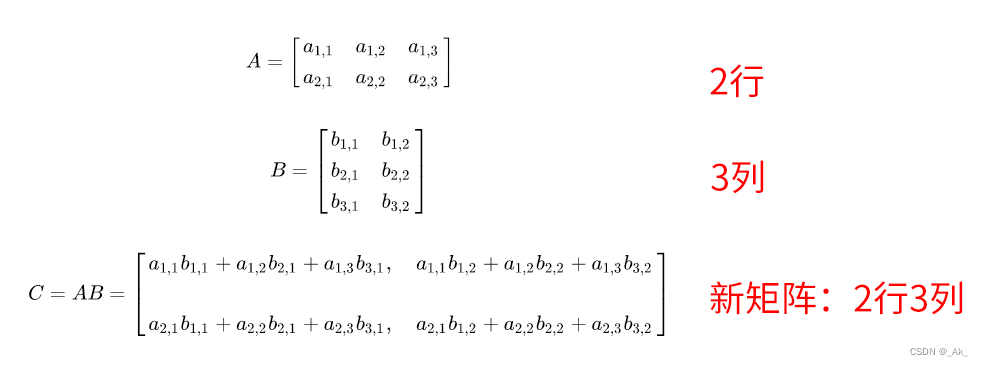
用这图应该更易理解些: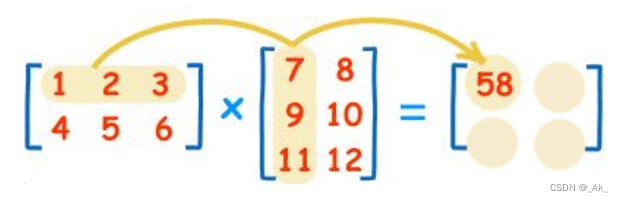
eg.可在类型为detail的AttributeWrangle节点输入以下代码,
matrix mat1 = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
matrix mat2 = set(set(16,15,14,13),set(12,11,10,9),set(8,7,6,5),set(4,3,2,1));
matrix mat3 = mat1 * mat2; //相乘顺序不同 结果不同
matrix mat4 = mat2 * mat1;
4@mat3 = mat3;
4@mat4 = mat4; 结果为: //相乘顺序不同 结果不同,![]()
8、与单位矩阵相乘
矩阵与单位矩阵相乘,得到的还是原矩阵,相乘顺序不影响结果。
9、与转置矩阵相乘
矩阵与转置矩阵相乘:![]()
eg.可在类型为detail的AttributeWrangle节点输入以下代码,
matrix mat1 = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
matrix mat2 = set(set(16,15,14,13),set(12,11,10,9),set(8,7,6,5),set(4,3,2,1));
matrix mat3 = transpose(mat1) * transpose(mat2);
matrix mat4 = transpose(mat2 * mat1);
4@mat3 = mat3;
4@mat4 = mat4; 结果为:两结果相同![]()
10、与向量相乘
①行向量与矩阵相乘,得到一个新向量/值。一般来说,使用向量时需要注意顺序,但是在Houdini中,向量与矩阵相乘,顺序不影响结果,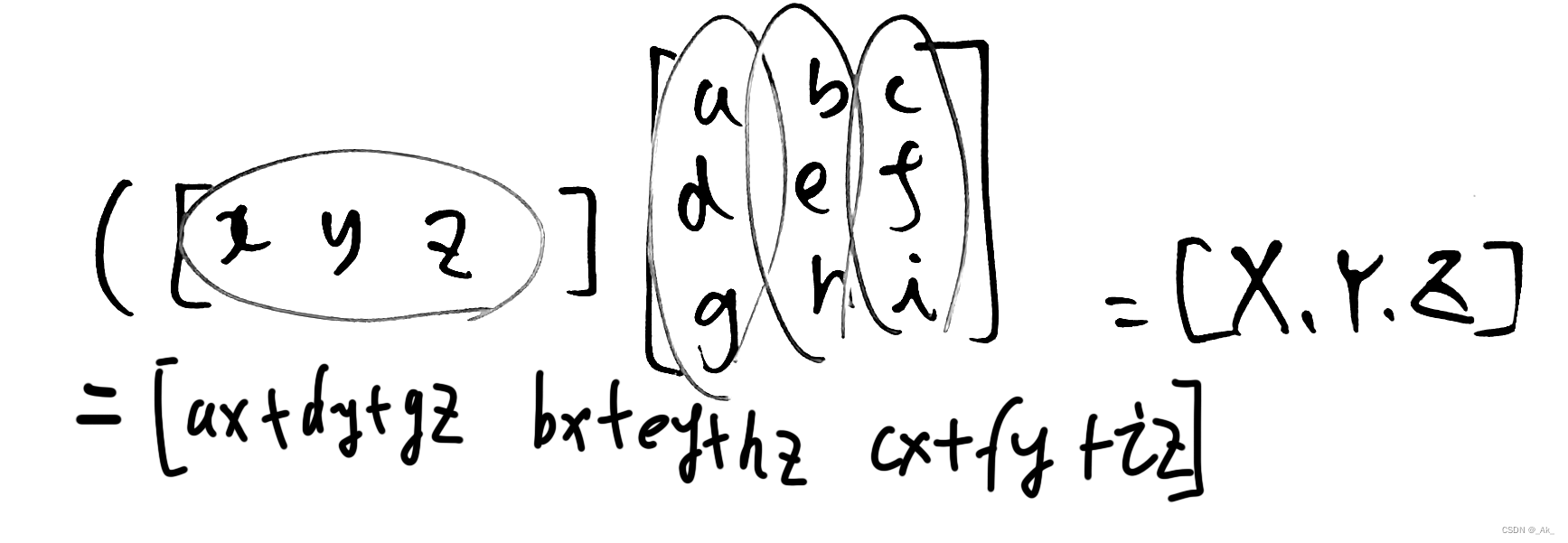
或者: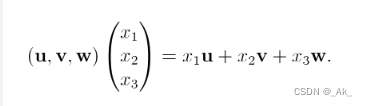
eg.可在类型为detail的AttributeWrangle节点输入以下代码,
//向量与矩阵相乘 顺序不影响结果
vector v = set(1, 2, 3);
matrix mat = set(set(1,2,3,4),set(5,6,7,8),set(9,10,11,12),set(13,14,15,16));
vector v1 = v * mat;
vector v2 = mat * v;
v@v1 = v1;
v@v2 = v2; // v1 与 v2 结果相等 ②矩阵与列向量相乘,得到一个新矩阵(2行1列)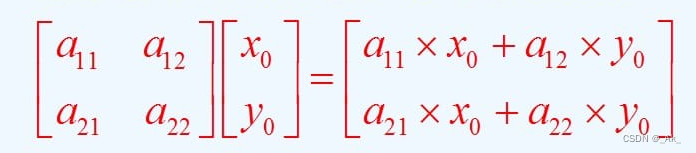
③4X4矩阵与向量相乘
与上面的【①行向量与矩阵相乘】相似,只不过在与4X4矩阵相乘的过程中,向量 (x, y, z) 被转换成 (x, y, z, 1) 后再与4X4矩阵相乘。
(x, y, z, 1) :参数1表示位置/移动、参数为0时表示方向,不写参数默认为1/位置。
11、矩阵与位移
在4x4矩阵中,最后一行表示位移Translation值。
比如,某物体从点 (x, y, z) 移动到某点,即移动向量 (a, b, c), 把向量带入到4X4矩阵,移动后的新位置为: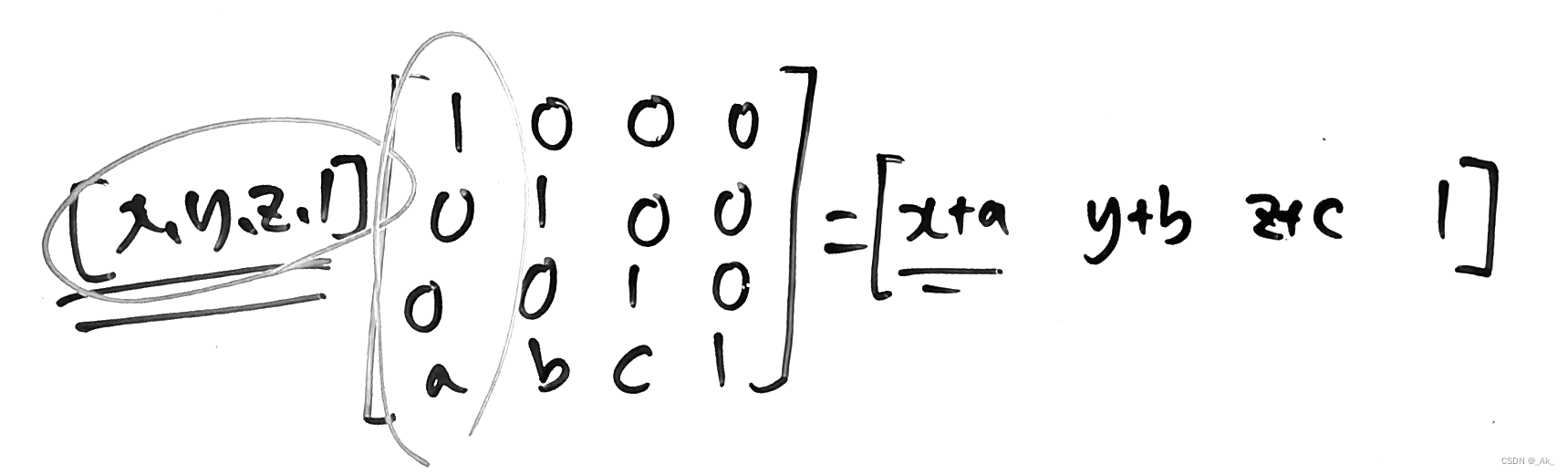
当然,单一移动使用矩阵意义不大。需要复杂变换时可使用矩阵进行变换。
eg.一个polygon的Sphere小球节点、一个类型为Points的AttributeWrangle节点输入以下代码:
vector move = chv('move'); //向量通道
matrix mat = ident(); //单位向量
translate(mat, move); //移动
@P = @P * mat; //小球移动
// @P = @P + move; 用这也可以达到同样的移动效果结果:滑动通道向量move值,小球根据向量值移动。
12、矩阵与缩放
物体的每个坐标的x、y、z值具有特定大小或特定比例值,假设物体某个点位置为 (x, y, z) ,按比例 (a, b, c) 进行缩放,那么该点的新位置为 (ax, by, cz),在矩阵中可表示为: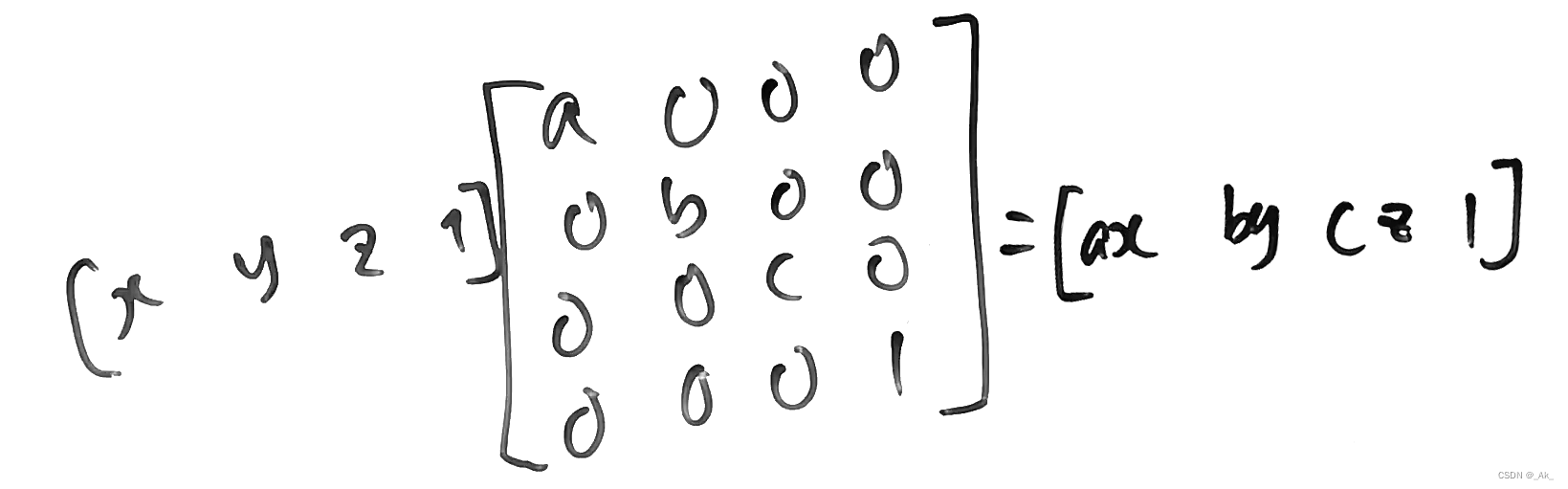
当然,单一缩放使用矩阵意义不大。需要复杂变换时可使用矩阵进行变换。
eg.一个polygon的Sphere小球节点、一个类型为Points的AttributeWrangle节点输入以下代码:
vector scale = chv('scale'); //向量通道
matrix mat = ident(); //单位矩阵
scale(mat, scale); //使用矩阵进行缩放
@P = @P * mat; //小球缩放
// @P = @P * scale; 用这也可以达到同样的缩放效果结果:滑动向量通道的x、y、z值,可以控制小球的x、y、z方向的缩放。
13、矩阵与旋转
以2D旋转为例,在二维空间中的任意向量,可以通过二维的基向量来表示向量(可以理解为用坐标系来表示)。可以联想一下物理中的静止参考系和动参考系。动静参考系在这里对应于动静坐标系。向量旋转的同时,动坐标系是相对于这个向量不动的,相对于静止坐标系则旋转同样的角度。只要知道旋转后动坐标系中的标准正交基在静止坐标系中的表达,就能知道旋转后的向量在静止坐标系中的表达。(本段文字来自@太阳与风博士)
向量绕二维直角坐标系原点逆时针旋转θ,对应的旋转矩阵R(θ)为: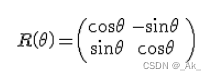
关于2X2旋转矩阵的推导过程,及3x3旋转矩阵可以看这里的推导过程,点击直达。
eg.按下图添加节点,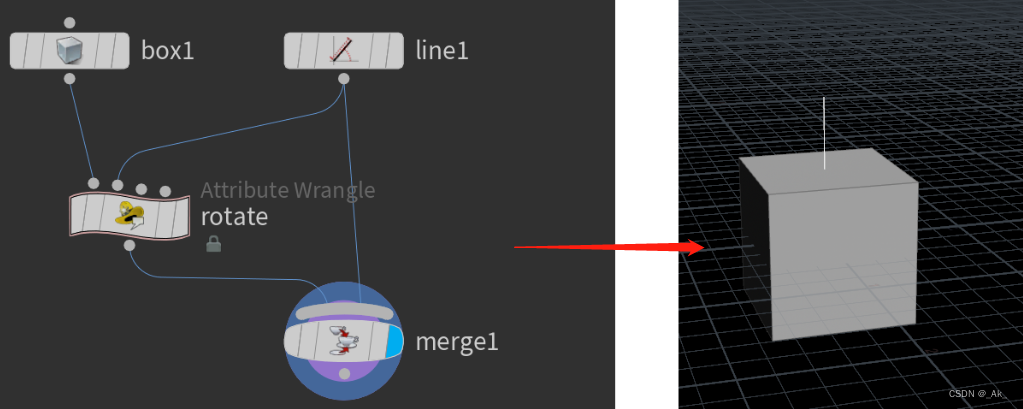
在类型为points的rotate中写入以下代码:
vector axis = normalize(point(1, 'P', 1)); //直线作为旋转轴
float ang = radians(chf('angle')); //范围设为0~360
matrix mat = ident(); //单位矩阵
rotate(mat, ang, axis); //旋转,直线为旋转轴,旋转角度为ang
@P *= mat; //更新box位置 结果:改变直线转向及滑动角度ang值,box仍以直线为旋转轴进行旋转。
14、组合变换矩阵
移动、旋转、缩放组合变换,看看不同顺序的组合变化。
(理论可以大概参考这篇文章——>点击直达)
eg.一个box盒子节点、一个类型为Points的AttributeWrangle节点输入以下代码:
matrix mat = ident();
float ang = radians(chf('angle')); //设置范围0~360
vector axis = set(0, 1, 0); //旋转轴
vector move = set(chf('move'), 1, 1); //暂设置为1~3
vector scale = set(chf('scale'), 1, 1); //暂设置为0-3
//改变下面三行代码的顺序,变换结果不相同
translate(mat, move);
scale(mat, scale);
rotate(mat, ang, axis);
@P *= mat;结果:略
如何确定变换顺序?
使用 maletransform()函数, 可在Houdini自带的外部脚本处查看具体用法(安装路径\houdini\vex\include\math.h),下面使用记事本打开math.h脚本,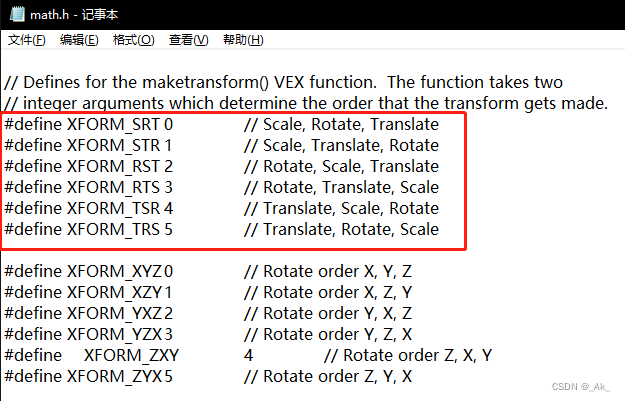
如图所示,可以使用【XFORM_SRT】或【XFORM_0】等确定组合变换顺序。(截图后半部分是四元数相关的欧拉角转换顺序)。
eg.对上面的【eg】代码进行修改,
float ang = chf('angle'); //旋转角度 设置范围0~360
vector rot = set(0, ang, 0); //沿Y轴旋转角度
vector move = set(chf('move'), 0, 0); //暂设置为1~3
vector scale = set(chf('scale'), 1, 1); //暂设置为0-3
int trs = chi('trs'); //位移、旋转、缩放变换顺序,范围0~5
int xyz = chi('xyz'); //旋转顺序,范围0~5
matrix mat = maketransform(trs, xyz, move, rot, scale);
@P *= mat;结果:略
15、矩阵转换函数
cracktransform() 函数把4x4矩阵分解为位移、旋转、缩放。
使用该函数,必须知道/指定变换顺序、转换顺序
eg.使用【14、Combine Transformation Matrix组合变换矩阵】的节点及代码,
①在代码节点最后一行加上一行代码,
4@mat = mat;②添加并在下方连接类型为points的attributeWrangle节点,并写入以下代码,
int trs = chi('trs'); //与上一节点的 trs 复制粘贴相对引用
int xyz = chi('xyz'); //与上一节点的 xyz 复制粘贴相对引用
vector t, r, s;
cracktransform(trs, xyz, set(0, 0, 0), 4@mat, t, r, s);
v@t = t;
v@r = r;
v@s = s;结果:略
16、小练1—基础变换
eg.一个box盒子节点、一个类型为Points的AttributeWrangle节点输入以下代码:
float rad = chf('rad'); //后面用作在X轴上的位移距离
float ang = radians(chf('ang')); //旋转角度 范围设置0~360
float size = cos(ang * 4); //一个360°周期内,进行了4次变换
size = fit(size, -1, 1, 1.0, 3.0); //映射函数,把size值从-1到1重新映射为1.0到3.0
matrix mat = ident();
translate(mat, set(0.5, 0, 0)); //设置中心点,因为box默认中心点为(0,0,0)且默认大小为1
scale(mat, set(size, 1, 1)); //X方向进行缩放
translate(mat, set(rad, 0, 0)); //在X轴上的位移
rotate(mat, ang, set(0, 0, 1)); //旋转角度,即转1圈
@P *= mat;结果:①滑动rad值;②在生成的通道中,把ang通道值改为:$FF / $FEND * 360,
17、小练2—扭曲和弯曲
eg.①一个box盒子节点、一个类型为Points的AttributeWrangle节点输入以下代码:
float boxheight = chf('boxheight'); //box高度,与box节点的Y轴高度【复制-粘贴引用】
float twistang = chf('twist_ang') * $PI; //扭曲角度
float bendrad = chf('bend_rad');
float bendang = chf('bend_ang') * $PI;
matrix mat = ident();
//根据box的高度/Y轴坐标值映射为角度范围 (0.0, twistang)。因为box中心点在 (0,0,0),所以需要乘以0.5
float tang = fit(@P.y, -boxheight * 0.5, boxheight * 0.5, 0.0, twistang);
rotate(mat, tang, set(0, 1, 0)); // 得到一个旋转矩阵,以Y轴为轴心旋转,旋转角度 0~tang°
//scale值为0.01~1.0~0.01 根据box的高度/Y轴坐标值映射为0.0~180°,角度范围对应sin函数值范围为0~1~0
float scale = max(sin(fit(@P.y, -boxheight * 0.5, boxheight * 0.5, 0.0, $PI)), 0.01);
scale(mat, set(scale, 1, scale)); //位于X、Y轴的点进行缩放,缩放为 0.01 ~ 1 ~ 0.01
@P *= mat;其中一些设置:box节点的细分设置为(5,50,5),高度设置为5(大小随意);AttributeWrangle节点的boxheight通道设置为:与box的高度绑定,即【复制-粘贴引用】,
结果为:基于上述条件,及twist_ang=1.5的情况下,(为了排版美观,下图旋转90°为正确结果)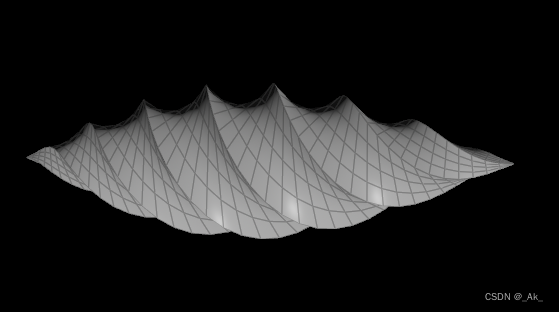
②对代码进行添加弯曲代码,完整代码如下,
float boxheight = chf('boxheight');
float twistang = chf('twist_ang') * $PI;
//添加代码
float bendrad = chf('bend_rad'); //弯曲半径/移动距离
float bendang = chf('bend_ang') * $PI; //弯曲角度 范围暂设为0~2,即最大值为2π,即一个圆
matrix mat = ident();
float tang = fit(@P.y, -boxheight * 0.5, boxheight * 0.5, 0.0, twistang);
rotate(mat, tang, set(0, 1, 0));
float scale = max(sin(fit(@P.y, -boxheight * 0.5, boxheight * 0.5, 0.0, $PI)), 0.01);
scale(mat, set(scale, 1, scale));
//添加代码
translate(mat, set(-bendrad, 0, 0)); //box沿-X轴移动
//box的高度进行映射,映射的角度范围为 (0.0,bendang),当bendang = 2π时,即弯曲360°
float bang = fit(@P.y, -boxheight * 0.5, boxheight * 0.5, 0.0, bendang);
rotate(mat, -bang, set(0, 0, 1)); //沿Z轴旋转
@P *= mat;
结果为:基于上述条件,及弯曲半径bendrad = 2,弯曲角度bendang=1(即弯曲π),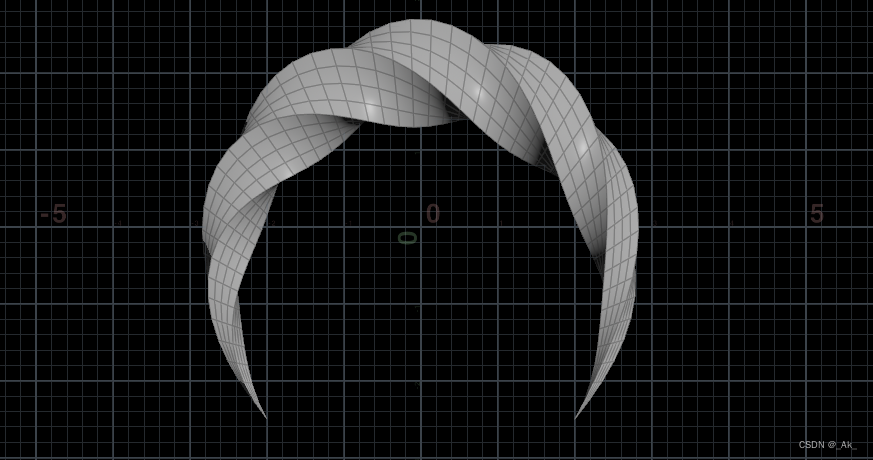
③扩展,对扭曲、弯曲的角度可添加帧相关代码,使其转起来
//看着位置添加,不懂就白学了
tang += $PI * 2 * @Frame / $FEND * chi('tangmult'); //引入帧相关,实现动态扭曲
bang += $PI / 2 * @Frame / $FEND; //动态旋转/弯曲结果为:基于上述条件,及扭曲速率tangmult = 3的情况下,(图片不够直观,可以看B站视频第十五节的2h48m17s)
18、小练3—逆变换
eg.①继续使用【17、Exercise2——Twisting and Bending扭曲和弯曲】的案例,在代码节点最后一行添加代码,
//对变换后的矩阵进行存储,方便调用
4@mat = mat;②在下方添加及连接类型为points的attributeWrangle节点并写入代码,
matrix mat = 4@mat;
matrix imat = invert(mat);
@P *= imat; 结果为:box打回原形,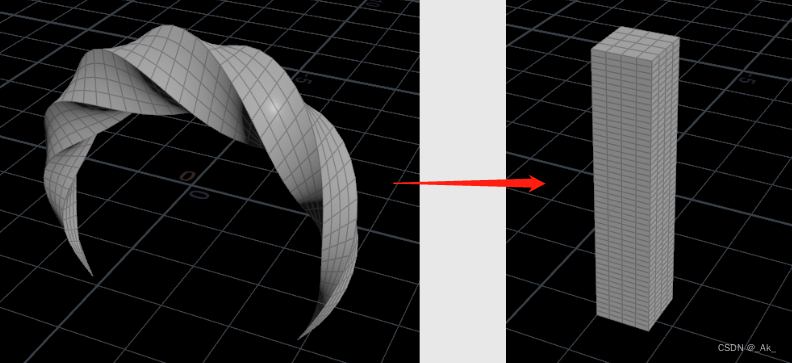
19、二面体函数
将方向从一个向量更改为另一个向量方向。
eg.①如下图所示创建节点: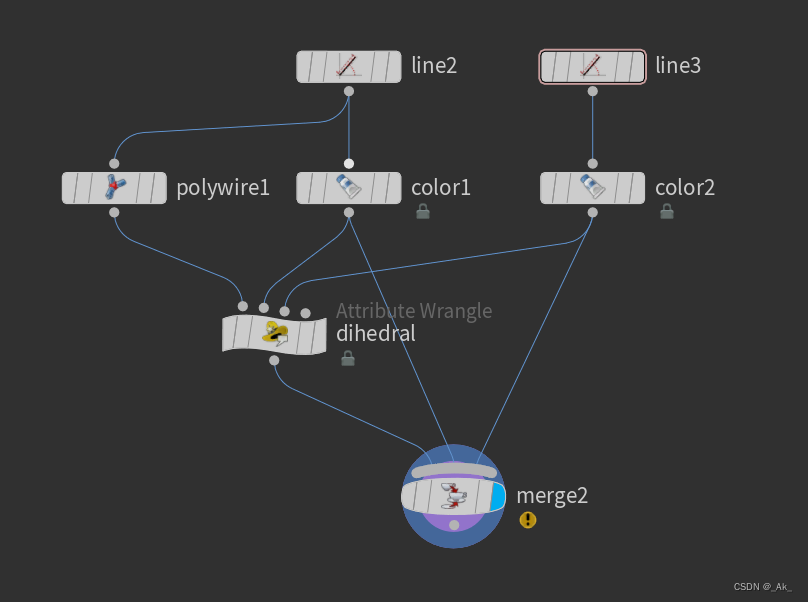
②对节点进行设置:
line2、line3随便旋转下,color1、color2颜色随意;
polywire1节点是从线生成管道,细分设置8或者任意值;
dihedral节点类型为Points。
③在dihedral节点中写入以下代码,
vector cdir = normalize(point(1, 'P', 1)); //直线方向进行归一化
vector tdir = normalize(point(2, 'P', 1)); //直线方向进行归一化
matrix mat = dihedral(cdir, tdir); //创建矩阵。不懂看官方文档
@P *= mat;
结果为:polywire对象由直线lin2(红色)的转向,变为直线line3(蓝色)的转向,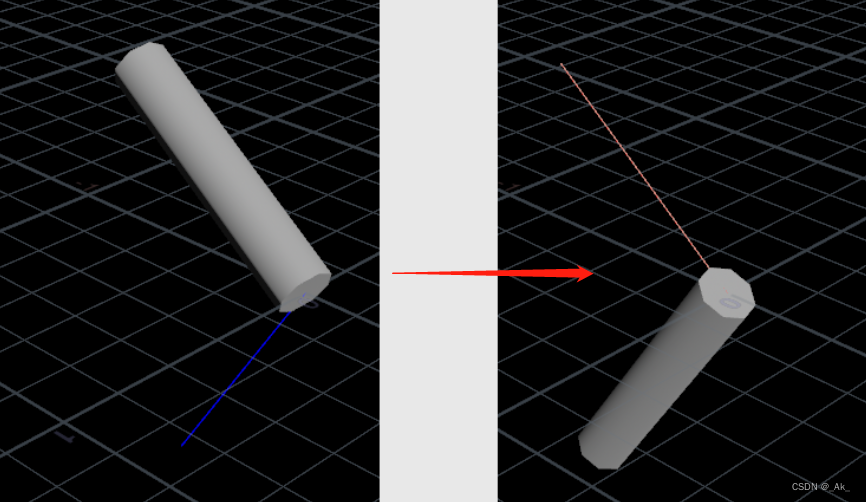
20、朝向函数
lookat() 函数用法官方文档截图如下,
该函数计算两个向量之间的差值向量(To-From),然后物体以-Z轴为起点旋转,旋转大小为两个向量的差值向量。
有点绕,点击可以看这个老哥的文章解释。
eg.理论:创建一个顶点指向-Z轴的圆锥,再创建一个随机点,使用 lookat() 函数使圆锥指向点。
实操:
①如下图创建节点,并进行一些必要设置:
circle1细分设置4;
transform1节点的Translate的Z轴改成-2;
polyloft1节点的U wrap选择On;
add1节点添加一个点,随便移动下;
lookat节点类型为Points,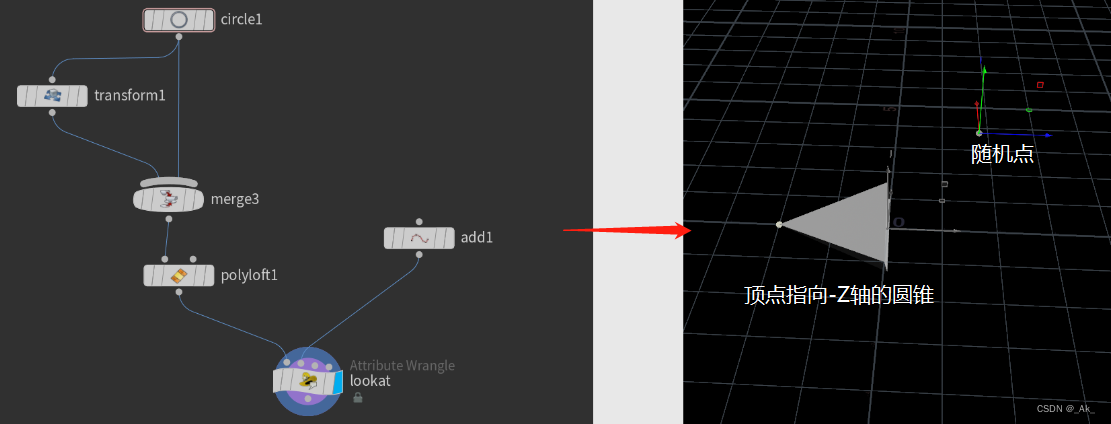
②在lookat节点写入如下代码,
vector from = set(0, 0, 0);
vector to = point(1, 'P', 0);
float roll = chf('roll'); //范围0~360
matrix3 mat = lookat(from, to, roll);
@P *= mat; 结果:圆锥指向随机点,滑动Roll值,变化如下图,
21、实例化函数
instance() 函数,创建一个给定参数的变换矩阵。类似复制。
eg.先上节点图及结果: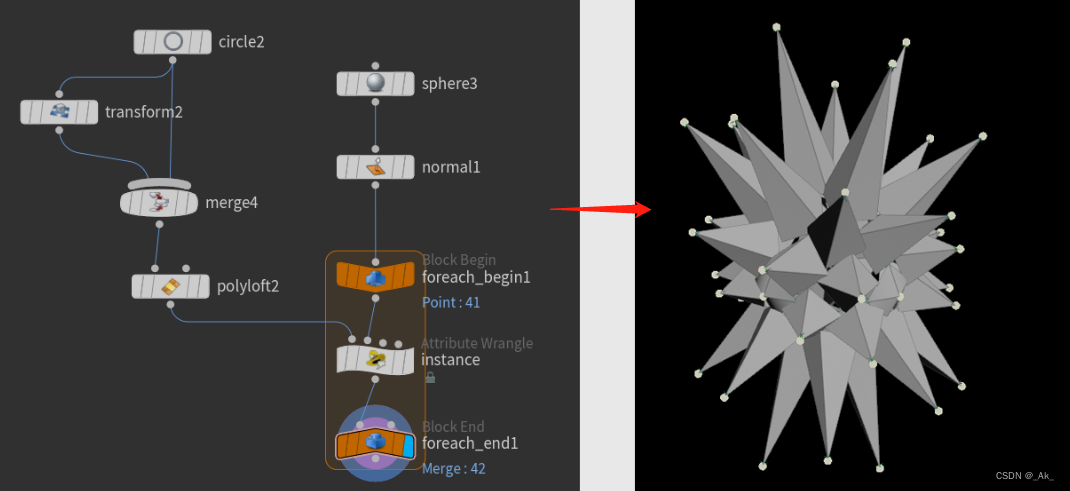
操作:可以拿【 20、Lookat VEX Function朝向函数】的案例进行修改,
①设置:
circle1细分设置4;
transform1节点的Translate的Z值改成2;
polyloft1节点的U wrap选择On;
sphere3节点类型为Polygon;
normal1节点的Add Normals to选择Points,即点法线;
foreach节点类型为for-Each Point;
instance节点类型为Points,
②instance节点写入代码,
vector pos = point(1, 'P', 0); //点位置
vector norm = point(1, 'N', 0); //点法线
vector scale= set(1, 1, abs(pos.y) + 0.25); //缩放
matrix mat = instance(pos, norm, scale);
@P *= mat;22、小练—矩阵插值
就是在两个矩阵变换中之间平滑过渡。
最好使用四元数进行旋转,而不是向量。
eg.直接使用【21、Instance VEX Function实例化函数】的案例,在instance节点添加代码,
完整代码如下:
vector pos = point(1, 'P', 0); //点位置
vector norm = point(1, 'N', 0); //点法线
vector scale= set(1, 1, abs(pos.y) + 0.25); //缩放
matrix mat = instance(pos, norm, scale); //矩阵mat为最终状态
vector t, r, s;
cracktransform(0, 0, set(0,0,0), mat, t, r, s); //逆矩阵函数,把矩阵分解
float lerpval = chf('lerpval'); //插值系数 / 平滑过渡系数
vector sl = lerp(set(1,1,1), s, lerpval); //缩放插值,即缩放平滑过渡
vector tl = lerp(set(0,0,0), t, lerpval); //位移插值,即位移旋转过渡
vector4 q = eulertoquaternion(radians(r), 0); //旋转的欧拉角转为四元数,0表示旋转顺序
vector4 ql = slerp(quaternion(set(0,0,0)), q, lerpval); //对旋转四元数进行插值
vector rl = quaterniontoeuler(ql, 0); //旋转插值,即旋转平滑过渡,0表示旋转顺序
matrix lmat = ident();
scale(lmat, sl);
rotate(lmat, rl, 0);
translate(lmat, tl);
@P *= lmat; 结果:lerpval值0~1变化过程,


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









