







 本文详细介绍了如何在Houdini中使用VEX语言处理四元数进行旋转操作,包括四元数声明、四元数与旋转的可视化、对象旋转、螺旋旋转、欧拉角转换、四元数插值过渡以及二面体和定向向量的应用。通过多个练习和实例展示了四元数在3D旋转和动画中的重要性。
本文详细介绍了如何在Houdini中使用VEX语言处理四元数进行旋转操作,包括四元数声明、四元数与旋转的可视化、对象旋转、螺旋旋转、欧拉角转换、四元数插值过渡以及二面体和定向向量的应用。通过多个练习和实例展示了四元数在3D旋转和动画中的重要性。
原视频:https://www.youtube.com/playlist?list=PLzRzqTjuGIDhiXsP0hN3qBxAZ6lkVfGDI
Bili:Houdini最强VEX算法教程 - VEX for Algorithmic Design_哔哩哔哩_bilibili
Houdini版本:19.5
1、Quaternion四元数
vector4 = (x, y, z, w)——表示物体的旋转角度(x、y、z)及旋转轴(w).
2、四元数声明
可在类型为detail的attributeWrangle节点验证查看以下代码值:
vector4 val = set(0, 1, 2, 3);
p@val = val;float angle = radians(chf('ang')); //旋转角度
vector axis = normalize(chv('axis')); //旋转轴
vector4 val = quaternion(angle, axis); //四元数:旋转角度、旋转轴
p@val = val;3、四元数与旋转(可视化)
eg.① 添加一个Add节点(添加一个点)、一个attribcreate1节点(设置属性为方向向上的向量-->Name:N、Type:Vector、Value:1,0,0,0)、PointWrangle节点并写入以下代码:
float ang = radians(chf('ang'));
vector axis = normalize(chv('axis'));
v@axis = axis;
vector4 quat = quaternion(ang, axis);
@N = qrotate(quat, @N); // qrotate()一个旋转函数,@N根据四元数进行旋转② 对属性旋转轴@axis、旋转@N进行标记,以便观察。标记方法如下:
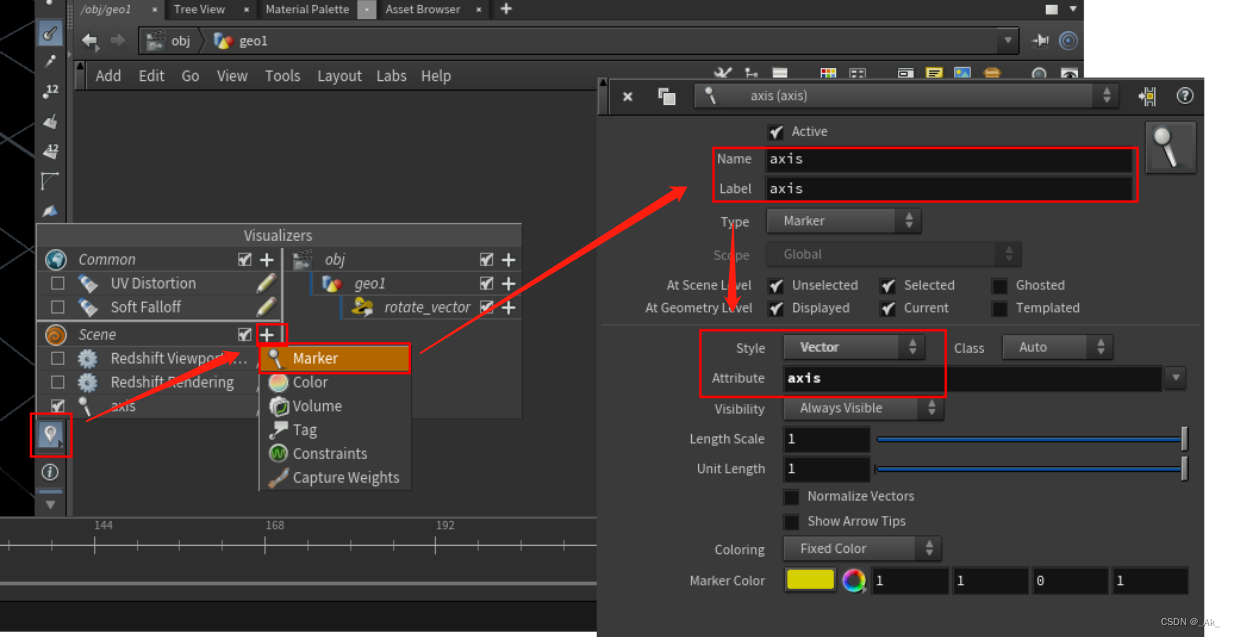
③设置旋转轴为 (0, 1, 0),滑动旋转角度从0°~360°结果为:旋转轴@axis为黄色,旋转@N青色。
感兴趣可以尝试不同旋转轴的旋转变化.
4、练习1——旋转对象
给对象设置一个旋转轴。
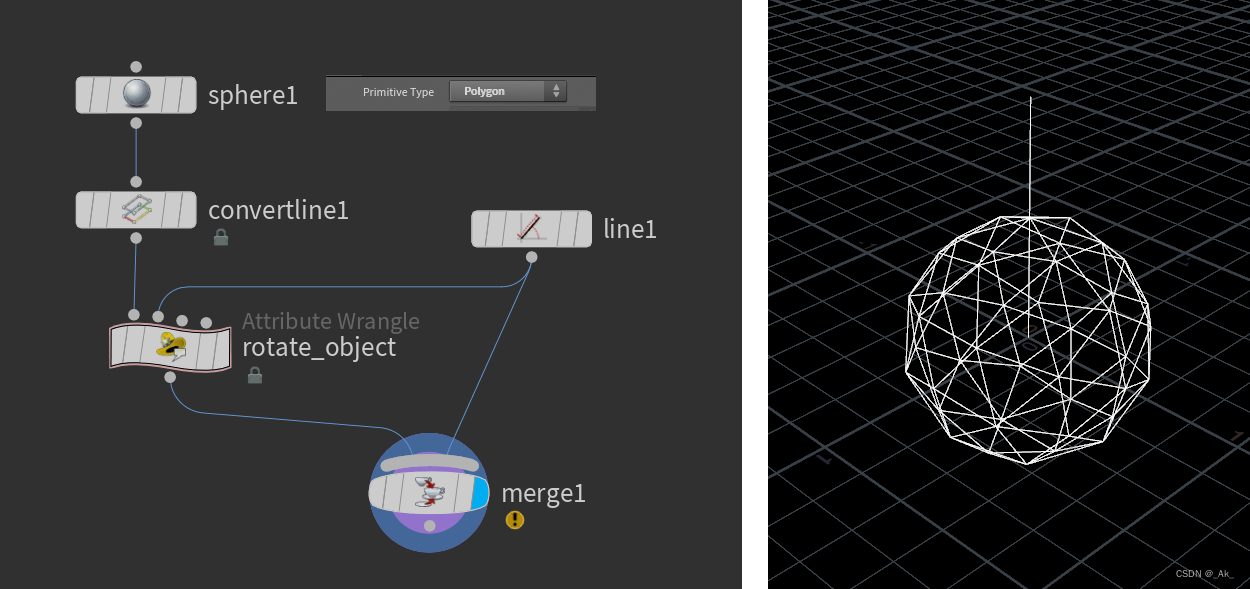
eg.①设置节点Sphere小球(polygon),convertiline节点(将小球转为线框,此步可有可无,仅方便观察,也可以直接在视图窗口进行设置),PointWrangle节点(detail_object)、line直线节点(作旋转轴)、最后merge结合在一起。如下:
②下PointWrangle节点写入以下代码:
vector pos = point(1, 'P', 1); //直线末点位置(起点(0, 0, 0)
vector axis = normalize(pos); //将直线归一化,后面用作旋转轴
float ang = radians(chf('ang')); //旋转角度
vector4 quat = quaternion(ang, axis); //四元数,旋转轴+旋转角度
@P = qrotate(quat, @P); //对象@P根据四元数,进行旋转结果为:直线为小球的旋转轴。滑动角度,小球以直线为中心旋转。
5、练习2——Sprial Rotation螺旋旋转
对线细分,进行螺旋旋转。
eg.创建一个直线line节点(类型polygon、Direction:1,0,0、Points:100)、一个PointWrangle节点,写入以下代码:
vector axis = set(0, 1, 0); //旋转轴
float ang = @ptnum * radians(chf('ang')); //旋转角度递增
vector4 quat = quaternion(ang, axis);
@P = qrotate(quat, @P); 结果:滑动角度按钮,下图为角度0~180之间的变化(半径——>直径),
6、欧拉角转四元数
在3D空间中,还可以使用Euler欧拉角表示物体旋转,欧拉角包括3个旋转,根据这3个旋转来指定一个刚体的朝向,这3个旋转分别绕x轴,y轴和z轴,

eulertoquaternion()函数,参数order表示旋转轴方向,可使用int也开始使用下面代码内的用法。
更具体的用法可以查看官方文档介绍,或者直接查看Houdini自带的外部函数(安装路径\houdini\vex\include)math.h脚本查看用法。
其实就是咱日常使用的旋转,不同旋转顺序,结果又不同,大概如下:
eg.① 添加一个Add节点(添加一个点)、一个attribcreate1节点(设置属性为方向向上的向量-->Name:N、Type:Vector、Value:1,0,0,0)、PointWrangle节点并写入以下代码:
vector angles = chv('angles');
angles = radians(angles);
//可尝试比较不同旋转顺序的不同结果 XFORM_XZY、XFORM_YZX、……
vector4 quat = eulertoquaternion(angles, XFORM_XYZ);
p@quat = quat;
@N = qrotate(quat, @N); 结果为:对@N、@quat进行标记,旋转顺序为XFORM_XYZ时,改变旋转角度angles的X值,实际上物体/点没有旋转或者任何变化,因为要旋转的轴已经在X轴上了。
感兴趣可以再添加个box之类代替点去验证下。
7、四元数转欧拉角
eg.在【6、Euler to Quaternion欧拉角转四元数】下面添加一个PointWrangle节点,
vector4 quat = p@quat;
vector euler = quaterniontoeuler(quat, XFORM_XYZ);
v@euler = degrees(euler);结果:euler值与【6、Euler to Quaternion欧拉角转四元数】的angles值相同。
8、四元数旋转与插值过渡
在两个四元数值之间创建平滑过渡。
下面例子可以看到不同平滑参数(0~1)值的过渡变化。
eg.先上节点连接图:
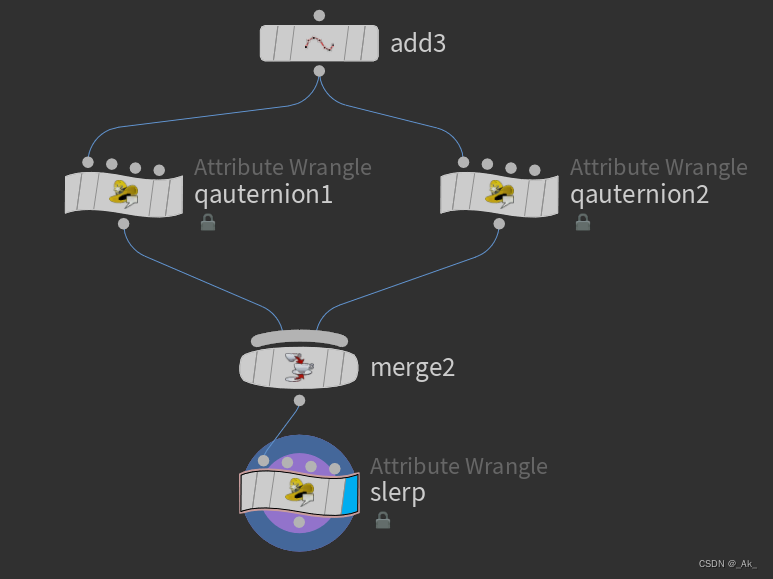
操作:
①创建一个add节点(添加一个点),
②PointWrangle1节点,并写入以下代码:
//旋转对象1
@N = set(0, 1, 0); //设置一个向量
float ang = radians(chf('ang')); //范围设置为0~360
vector axis = set(1, 0, 0); //设置旋转轴
vector4 quat = quaternion(ang, axis); //四元数:旋转角度、旋转轴
@N = qrotate(quat, @N); //@N根据四元数旋转
int pt = addpoint(0, @N);
int line = addprim(0, 'polyline', @ptnum, pt); //Add点(0,0,0)与@N点创建条线
setdetailattrib(0, 'quat1', quat); //对直线创建个detail属性③继续添加一个并排节点PointWrangle2节点,写入以下代码:
//旋转对象2
@N = set(0, 1, 0); //设置一个向量
float ang = radians(chf('ang')); //范围设置为0~360
vector axis = set(0, 0, 1); //设置旋转轴
vector4 quat = quaternion(ang, axis); //四元数:旋转角度、旋转轴
@N = qrotate(quat, @N); //@N根据四元数旋转
int pt = addpoint(0, @N);
int line = addprim(0, 'polyline', @ptnum, pt); //Add点(0,0,0)与@N点创建条线
setdetailattrib(0, 'quat2', quat); //对直线创建个detail属性③添加merge节点,连接上面两个Pointw节点/旋转对象,再添加一个DetailWrangle节点,写入以下代码:
vector4 quat1 = p@quat1;
vector4 quat2 = p@quat2;
vector norm = set(0, 1, 0);
vector4 quat3 = slerp(quat1, quat2, chf('t'));
norm = qrotate(quat3, norm);
//搞条线,方便观察混合旋转的样子
int pt1 = addpoint(0, set(0, 0, 0));
int pt2 = addpoint(0, norm);
int line = addprim(0, 'polyline', pt1, pt2);结果:对两旋转对象设置随便角度值(青色线),其混合变化为(白色线),
因混合值也包含旋转轴,所以它的混合插值变化稍显弧度状,
9、练习3——Rotation Animation旋转动画
一个矩形,随机旋转一个角度,再随机旋转一个角度,再随机旋转……
eg.使用循环函数 foreach() 与随机函数 rand() 生成随机旋转角度,再用混合函数slerp()将旋转平滑过渡。
节点连接图如下:
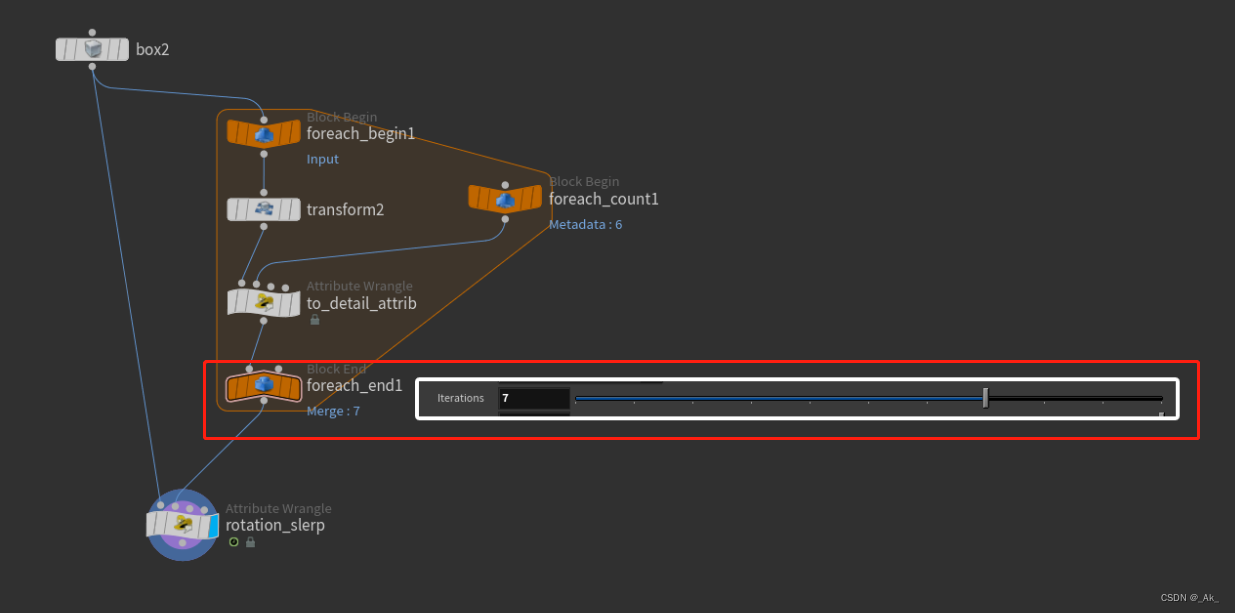
操作:一些代码及设置
①to_detail_attrib节点(detail类型)写入以下代码:
vector roteuler = radians(chv('roteuler')); //获取Transform节点的随机旋转值,每次循环旋转都不一样
vector4 quat = eulertoquaternion(roteuler, XFORM_XYZ); //欧拉角转四元数:旋转角度,旋转顺序
int ite = detail(1, 'iteration'); //ite=detail属性的循环值,1,2,3,4,5,……
setdetailattrib(0, 'quat' + itoa(ite), quat); //对quat设置detail属性,
//itoa()函数把整数转为字符串,quat1、quat2、quat3、……②rotation_slerp(point类型)节点写入以下代码
int num = chi('num'); //已与循环次数复制引用,该值表示循环次数
float range = $FEND / float(num); //总帧数除以循环次数,得到每次旋转过渡的时间范围
float t = (@Frame % range) / range; //在时间范围range内,当前循环时间在范围内的占比(最大值为1),
//比如循环次数为6,当前帧为240帧,则每次旋转时间范围为40帧,在第70帧时,t=30/40
int curnum = floor(@Frame / range) % num; //当前循环次数,floor()函数返回小于或等于参数的最大整数
int nexnum = (curnum + 1) % num; //下一次循环次数,取余数运算,算是给运算加一层保险
vector4 curquat = detail(1, 'quat' + itoa(curnum)); //itoa()函数把int整数转为字符串
vector4 nexquat = detail(1, 'quat' + itoa(nexnum)); //下一次旋转角度
vector4 quat = slerp(curquat, nexquat, t); //旋转过渡
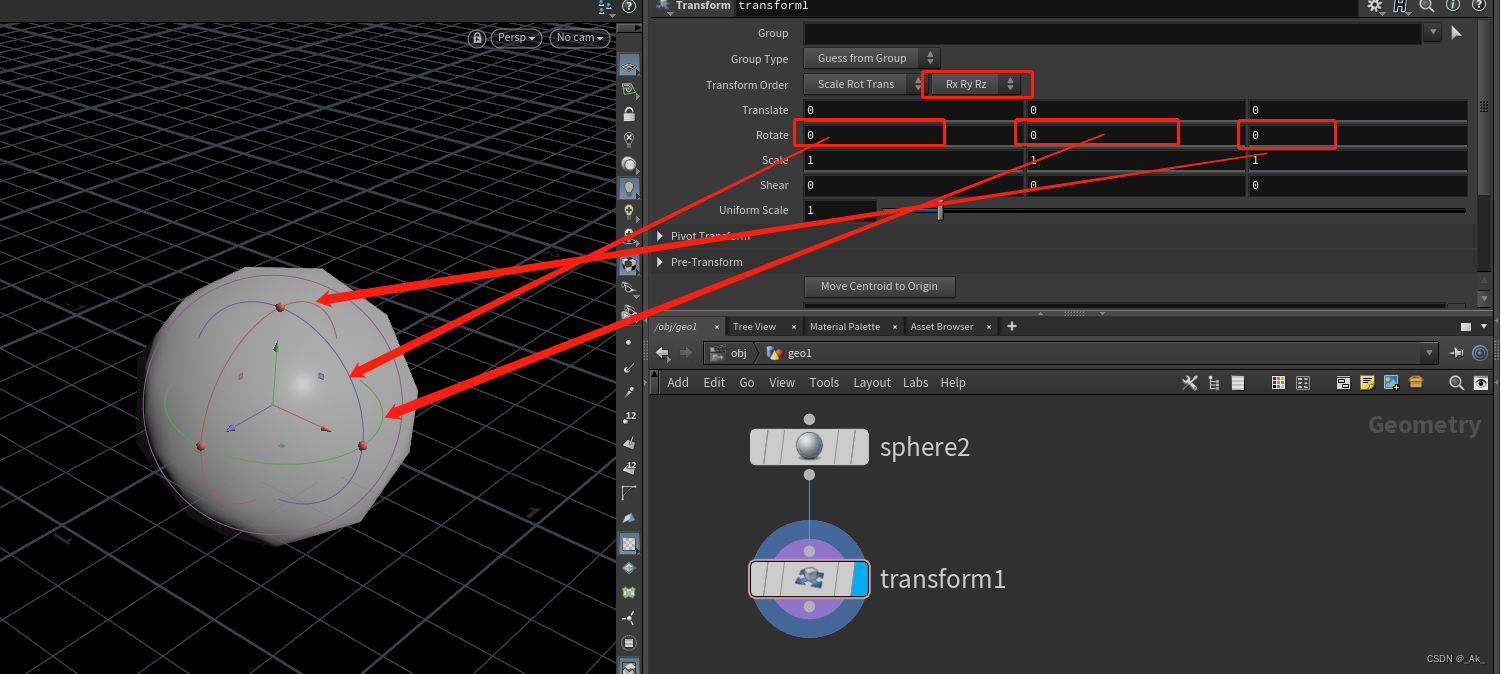
@P = qrotate(quat, @P); ③Transform节点设置:
每个Rotate值写入:其中,detail('../foreach_count1/', 'iteration', 0)指当前迭代次数,
rand(detail('../foreach_count1/', 'iteration', 0) + 3.215) * 360、
rand(detail('../foreach_count1/', 'iteration', 0) + 5.618) * 360、
rand(detail('../foreach_count1/', 'iteration', 0) + 15.85) * 360。
最后结果大概如下:(非固定值,随机就行,但范围最后是0~360之间)
![]()
④to_detail_attrib节点(detail类型)设置如下:
在to_detail_attrib节点的roteluer通道粘贴相对引用<——复制Transform节点的rotate值;
⑤rotation_slerp(detail类型)节点设置如下:
在rotation_slerp节点的num通道复制值——>在foreach_end1节点的interations值出粘贴相对引用;
结果为:设置循环次数为6,box尺寸为(0.2, 0.5, 1),初始角度随意,下图仅显示为0帧到80帧的旋转结果,
10、二面体与定向向量
dihedral ()函数:计算一个向量定到另一个向量的四元数,即一个向量到另一个向量的旋转角度、旋转轴。
如下图所示,line3旋转到line4,我们把圈圈定向到【line3旋转到line4】,又或者说圈圈替换为旋转后的line4。【4、练习1——Rotate Object旋转对象】仅是设置旋转轴,本次为定向到旋转后的状态,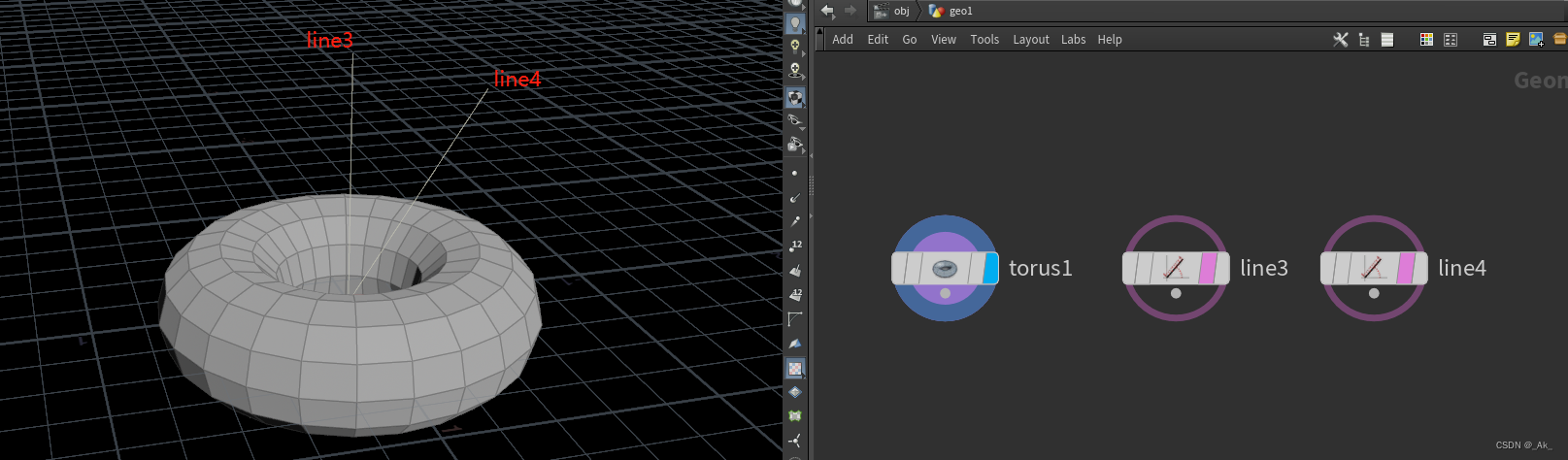
eg.先上结果:
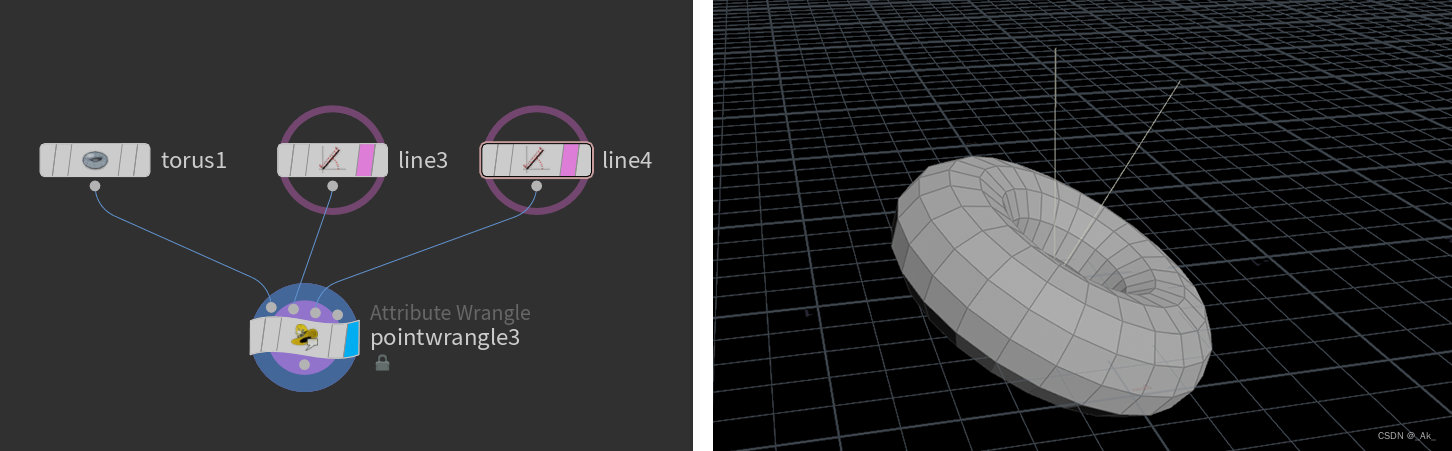
操作:
line4随便旋转下,PointWrangle节点写入以下代码:
vector dir1 = normalize(point(1, 'P', 1));
vector dir2 = normalize(point(2, 'P', 1));
vector4 quat = dihedral(dir1, dir2); //计算一个向量到另一个向量的四元数
@P = qrotate(quat, @P); //圈圈根据四元数旋转11、练习4——二面体动画
object对象在小球表面转圈圈。
理论:A)利用三角函数让点动起来,运动路径的形状如小球形状;B)获取点位置的小球法线;C)
Y轴向与法线组成二面体,Object定向到二面体。
先上结果:下图结果仅部分,圈数为2,帧数0~90帧(总帧数240帧),
eg.节点连接及设置:
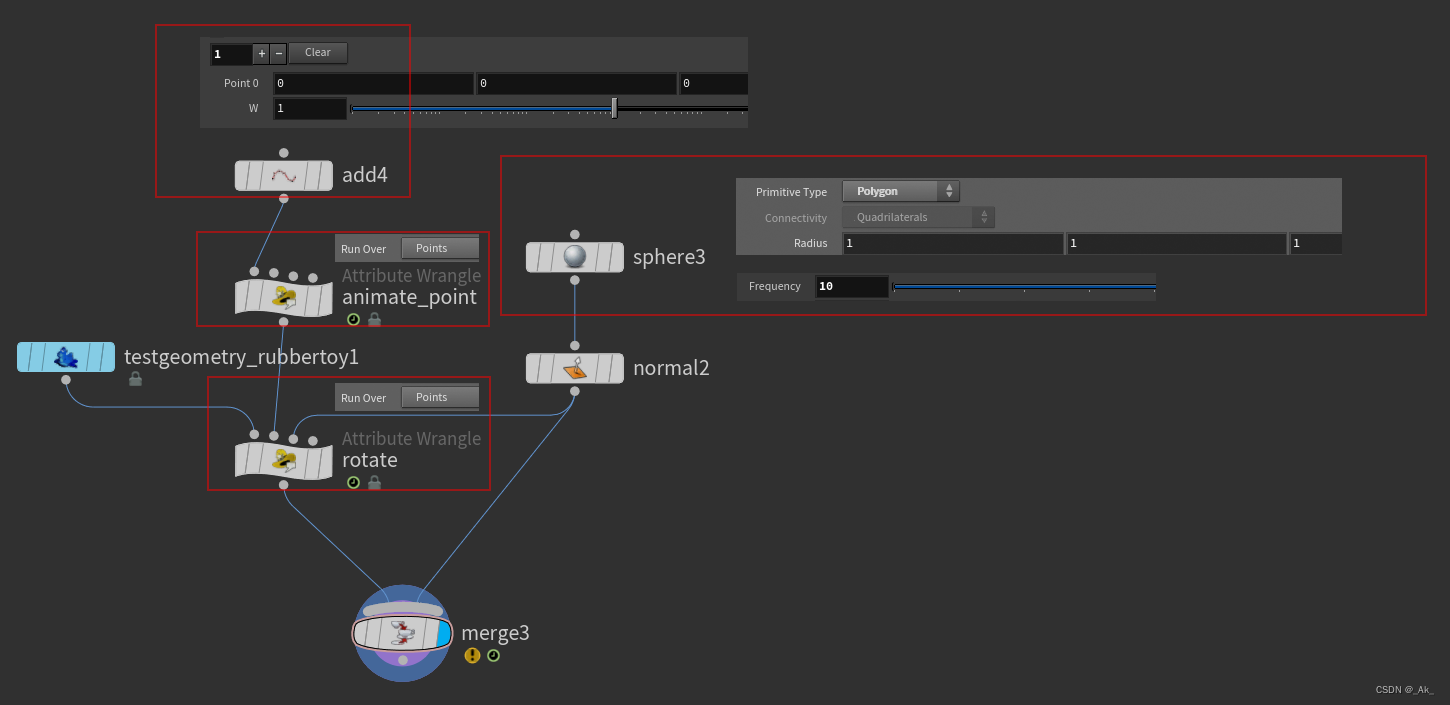
其中,animate_point节点写入以下代码:
//点绕小球转圈圈(点运动形状如小球)
float ang = $PI * 2.0 * @Frame / $FEND; //时间开始到结束,角度0~360°
float h = sin(ang); //半径为1,sinθ值作为高度(Y坐标)
float rad = sqrt(1.0 - pow(h, 2.0)); //勾股定理,在某一帧时,点在X、Z方向的长度
float ang2 = $PI * 2.0 * @Frame / $FEND * chi('num'); //自定义旋转圈数
vector pos = set(cos(ang2) * rad, h, sin(ang2) * rad);
@P = pos; //点更新位置rotate节点写入以下代码:
vector pos = point(1, 'P', 0); //点的位置
vector norm = uvsample(2, 'N', 'P', pos); //点位置的小球法线。uvsample()函数,给定坐标信息,返回指定属性值
vector4 quat = dihedral(set(0, 1, 0), norm); //Y轴向量与法线——》二面体
@P = qrotate(quat, @P); //定向到二面体
@P += pos; //更改Object中心点
















 218
218

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









