







代码:https://github.com/xingyizhou/CenterNet
论文地址: https://arxiv.org/abs/1904.08189
还有一篇 重名?https://arxiv.org/pdf/1904.08189.pdf https://github.com/Duankaiwen/CenterNet


文章要点:
针对基于anchor的检测方法(yolo v2-yolo v3,SSD ,faster-rcnn)在特征图中产生大量的bounding box 用于分类和位置修正,要求大量的计算资源消耗,额外的后处理,Loss复杂等。
文章就提出anchor-free的方式,通过Keypoint(中心点)和距离中心点的box的w,h回归box大小,外加offset偏移,这就节省了NMS操作。本文也是对CornerNet的改进。
实验结果:COCO数据上表现出:
| AP | FPS |
|---|---|
| 28.1% | 142FPS |
| 37.4% | 52FPS |
| 45.1% | 1.4FPS |
LOSS定义:
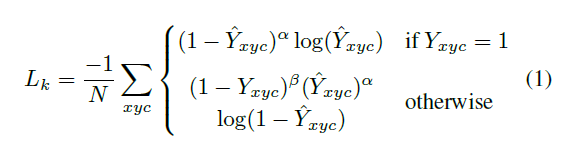
一:中心关键点Y的Loss
LOSS分为3个部分,首先,为中心关键点Y的Loss:
对于一幅输入(W, H)图像, 经过CNN产生一个heatMap =
W
R
×
H
R
×
C
\frac{W}{R}\times \frac{H}{R}\times C
RW×RH×C,用
Y
~
\widetilde{Y}
Y
代表,
Y
~
\widetilde{Y}
Y
ϵ
\epsilon
ϵ[0,1], C表示关键点的类型数(维度?),例如,人体姿态估计C=17个关节点,C=80个目标检测物体类别,R表示特征图相比输入图缩放倍数,一般默认R=4,即heatmap缩小为原图的1/4.
首先groundtruth生成的关键点为
P
P
P(具体先不解释这个,把BOX的坐标转换来的吧,),显示在预测低分辨率heatmap上为
P
^
\widehat{P}
P
=
P
/
R
P/R
P/R, 作者把CNN会生成heatmap 坐标 与GroudTruth关键点使用高斯核函数标准化,
σ
p
2
\sigma _{p}^{2}
σp2表示自适应的标准方差。

Y
^
x
,
y
,
c
\widehat{Y}_{x,y,c}
Y
x,y,c=1, 表示检测到一个关键点,
Y
^
x
,
y
,
c
\widehat{Y}_{x,y,c}
Y
x,y,c=0,表示为背景
定义使用focal Loss:
α
\alpha
α =2 ,
β
\beta
β=4 设为常数
二:offset Loss
缩小的 输出heatmap 恢复到原图,中心点可能差生误差,需要添加一个位移偏置损失,先在处采集局步关键点(?没看懂):

作者后面说O等于这个,后面看懂博主补充下:
然后算偏移量

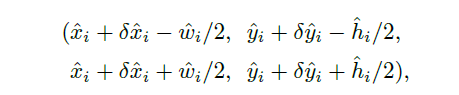
三、box 大小损失(这里没有IOU哦)
Groudtruth 坐标为(
X
m
i
n
X_{min}
Xmin,
Y
m
i
n
Y_{min}
Ymin,
X
m
a
x
X_{max}
Xmax,
Y
m
a
x
Y_{max}
Ymax), 中心点为
P
k
P_{k}
Pk为:

S
k
S_{k}
Sk表示box的W,H:

坐标损失用预测的(w,h)集合
S
^
p
k
\widehat{S}_{pk}
S
pk与每个关键点P的GroundTruth标记的(w,h)相减求平均值

总的Loss定义为: 中心点损失+偏移损失+box大小损失,
λ
s
i
z
e
\lambda_{size}
λsize=0.1 ,
λ
o
f
f
\lambda_{off}
λoff=1 ,用于权衡各项损失的比重

放张图,缓解一下硬核理论:

文章中给的实验对比图,可以稍作参考, 具体表现还真不能拿这个定,亲测。。。。
















 849
849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









