







在二维卷积层中,一个二维输入数组和一个二维核(kernel)数组通过互相关运算输出一个二维数组。如下图所示,输入是一个高和宽均为3的二维数组。我们将该数组的形状记为3×3或(3,3)。核数组的高和宽分别为2。该数组在卷积计算中又称卷积核或过滤器(filter)。卷积核窗口(又称卷积窗口)的形状取决于卷积核的高和宽,即2×2。
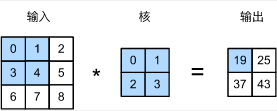
在二维互相关运算中,卷积窗口从输入数组的最左上方开始,按从左往右、从上往下的顺序,依次在输入数组上滑动。当卷积窗口滑动到某一位置时,窗口中的输入子数组与核数组按元素相乘并求和,得到输出数组中相应位置的元素。
0×0+1×1+3×2+4×3=19,
1×0+2×1+4×2+5×3=25,
3×0+4×1+6×2+7×3=37,
4×0+5×1+7×2+8×3=43.
代码实现:
# 二维相互关运算
def corr2d(X, K):
h, w = K.shape
Y = torch.zeros((X.shape[0] - h + 1, X.shape[1] - w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i, j] = (X[i: i + h, j: j + w] * K).sum()
return Y接下来来验证上图例子
X = torch.tensor([[0, 1, 2], [3, 4, 5], [6, 7, 8]])
K = torch.tensor([[0, 1], [2, 3]])
corr2d(X, K)
输出:
tensor([[19., 25.],
[37., 43.]])结果是对的,接下来完成物体边缘检测。检测图像中物体的边缘,即找到像素变化的位置。首先我们构造一张6×8的图像(即高和宽分别为6像素和8像素的图像)。它中间4列为黑(0),其余为白(1)。
X = torch.ones(6, 8)
X[:, 2:6] = 0
print(X)
输出:
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
然后我们构造一个高和宽分别为1和2的卷积核K。当它与输入做互相关运算时,如果横向相邻元素相同,输出为0;否则输出为非0。
K = torch.tensor([[1, -1]])
Y = corr2d(X, K)
print(Y)
输出:
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])可以看出,我们将从白到黑的边缘和从黑到白的边缘分别检测成了1和-1,卷积层可通过重复使用卷积核有效地表征局部空间。















 447
447











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









