






前言
一、前言
1.1.ThreadX操作系统简介
去年微软宣布收购ThreadX,但是没有公布后续策略,uCOS全家桶进入开源免费后,ThreadX也宣布正式加入。微软未来四年将投资50亿美元到物联网上,收购Express Logic是该战略的一部分。ThreadX的产品涵盖了各种领域,包括NASA的多个太空探测项目,飞机自动驾驶仪系统,火星侦察轨道器等。ThreadX及其所有中间件的安全认证等级,至今没有一款小型RTOS可以与其匹敌。
(1)医疗——FDA510(k),IEC-62304 Class C,IEC-60601,ISO-14971
(2)工业——UL-1998,IEC-61508 SIL 4
(3)运输/铁路——EN50128 SIL 4,BS50128, 49CFR236,IEC-61508
(4)航空航天设备——DO-178B,ED-12B,DO-278
(5)汽车——IEC-61508 ASIL D
(6)核应用——IEC-61508
(7)家电——UL/IEC 60730/60335
可见各种安全等级基本都达到了最高。像工业级安全认证IEC61508,ThreadX满足最高等级SIL4,而SafeRTOS,embOS,uCOS-II都只是SIL3。 随着uCOS和ThreadX全家桶都开源,其它RTOS影响是巨大的,还没有开源的,可能也要加入开源大浪了。那这是为什么呢?1、全球使用Express Logic的ThreadX操作系统的电子设备已经有62亿,这个震撼的数值在持续增长中。
2、因为ThreadX和它功能极为全面各种中间件:
Azure RTOS ThreadX
Azure RTOS NetX
Azure RTOS NetX Duo
Azure RTOS FileX
Azure RTOS GUIX
Azure RTOS GUIX Studio
Azure RTOS USBX
Azure RTOS TraceX
 1.2.系统移植前准备
1.2.系统移植前准备
本文中使用的开发板为小熊派IoT开发板,主控为STM32L431RCT6。
- 操作系统:Window10
- 生成初始化工程:STM32CubeMX
- 阅读代码:VSCode
- 编译器:arm-none-eabi-gcc工具链
- 构建工具:make
- 下载工具:OpenOCD
- 串口工具:QCOM_V1.6
二、环境搭建
2.1. 安装VScode扩展
这个扩展是华为LiteOS提供的,此处不需要了解过多,我们仅仅是使用此扩展完成以下事情:自动安装arm-none-eabi-gccG工具链
自动安装make构建工具
自动安装openocd下载工具
可以在VScode中一键编译、下载、调试
可以在VScode中查看串口输出
 安装完成之后重启VScode即可。
iot-link扩展只支持小熊派开发板的一键编译、下载,如果是其它开发板:
① 将arm-none-eabi-gcc和make工具添加到环境变量,在命令行编译;
② 使用ST-Link的下载软件或者STM32cubeProg下载程序;
③ 串口助手可以正常使用;
安装完成之后重启VScode即可。
iot-link扩展只支持小熊派开发板的一键编译、下载,如果是其它开发板:
① 将arm-none-eabi-gcc和make工具添加到环境变量,在命令行编译;
② 使用ST-Link的下载软件或者STM32cubeProg下载程序;
③ 串口助手可以正常使用;
2.2. 创建STM32CubeMX工程
使用STM32CubeMX创建一个基于小熊派开发板的裸机工程,只需要配置一个打印串口和正确的时钟频率(图省略)即可: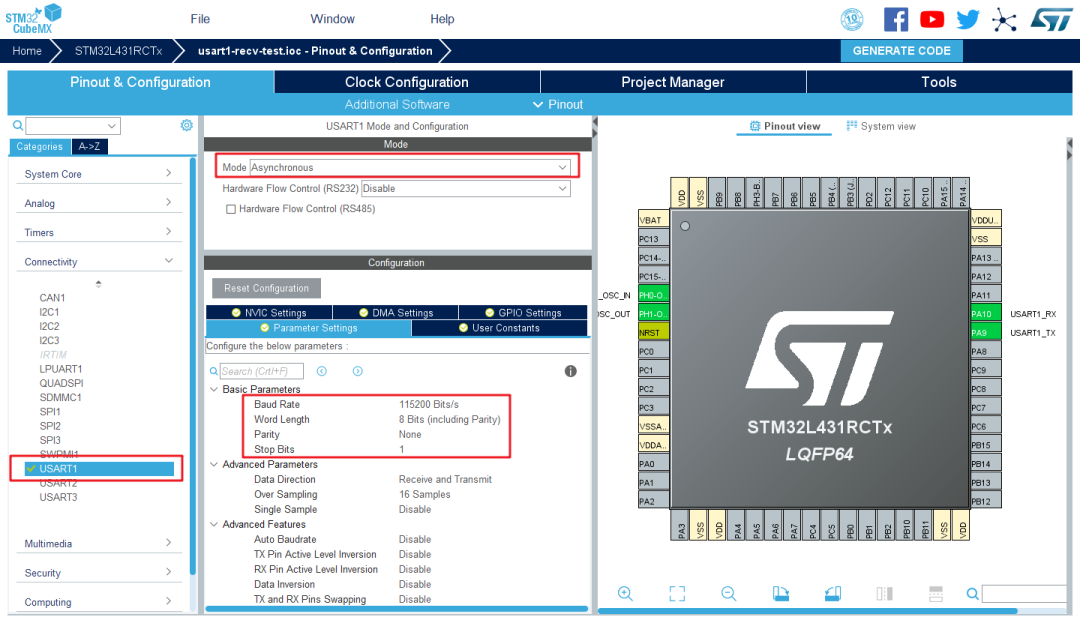
工程设置中选择Makefile,这样cubemx可以自动生成makefile: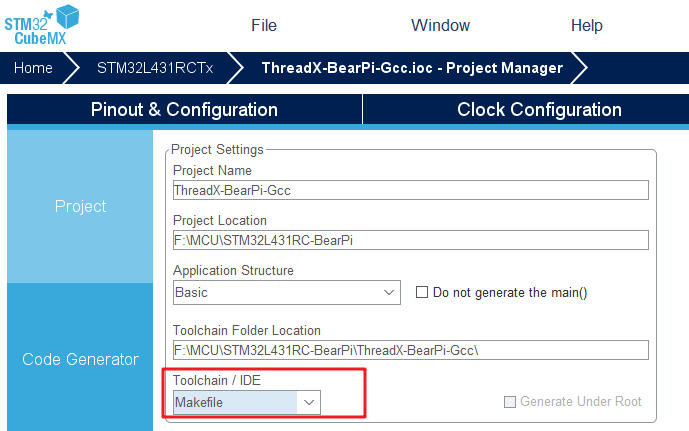 生成工程即可:
生成工程即可:
2.3. 导入工程到VScode
打开VScode,点击下方的Home(第2节扩展安装成功才会有),选择导入GCC工程: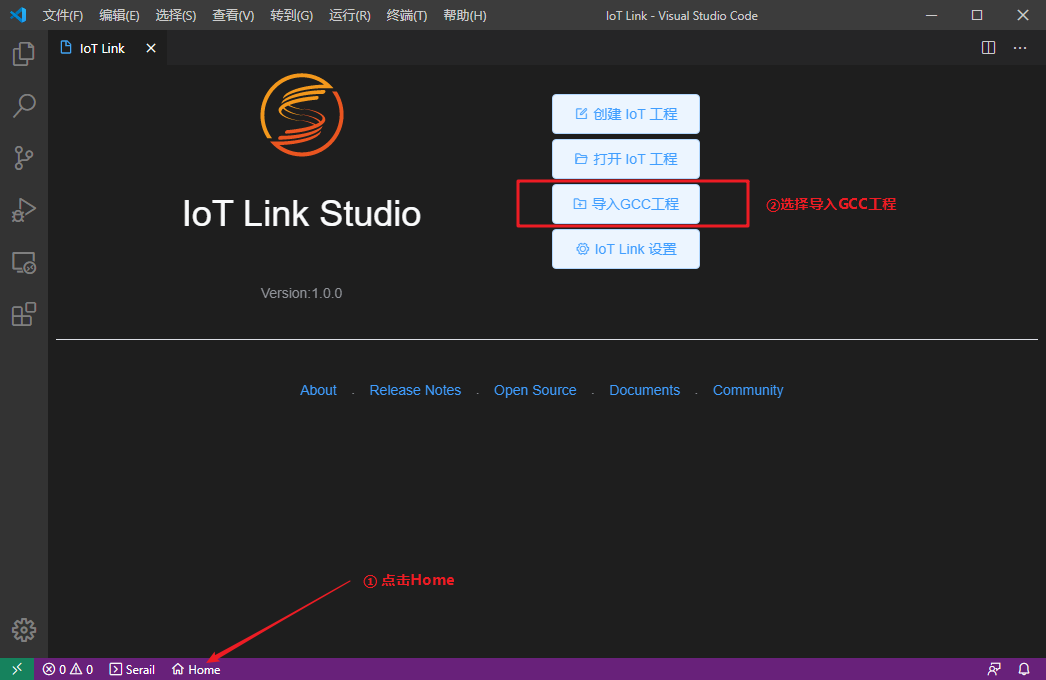 工程目录选择刚刚生成的目录,Makefile默认是此工程中的makefile,芯片选择STM32L431RCT6:
工程目录选择刚刚生成的目录,Makefile默认是此工程中的makefile,芯片选择STM32L431RCT6: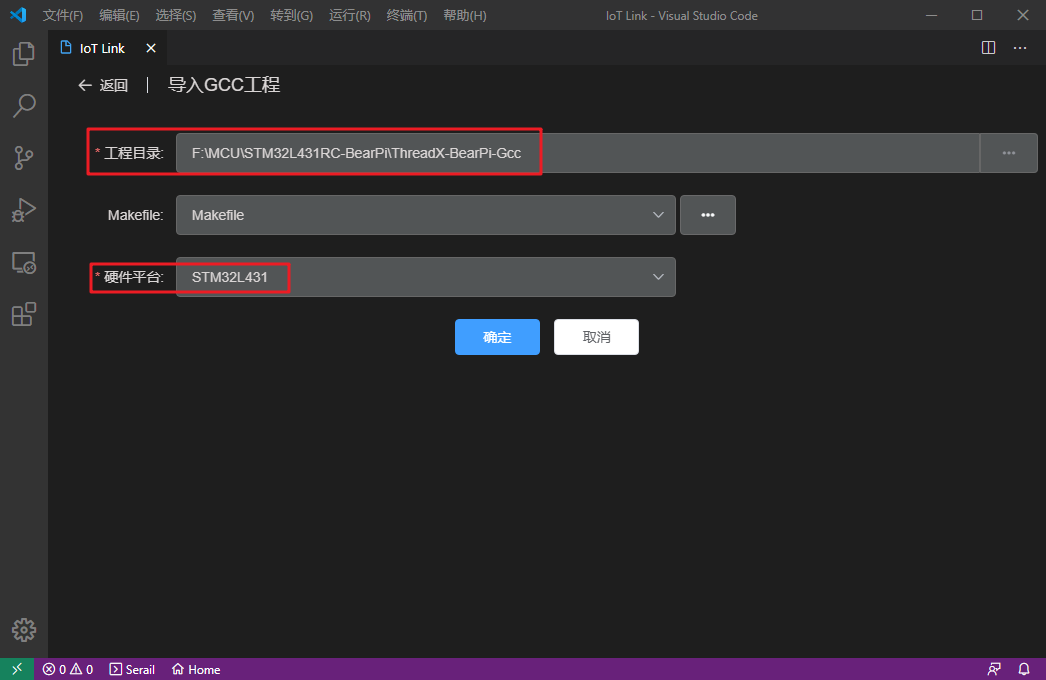 导入成功之后可以看到下方的操作按钮:
导入成功之后可以看到下方的操作按钮: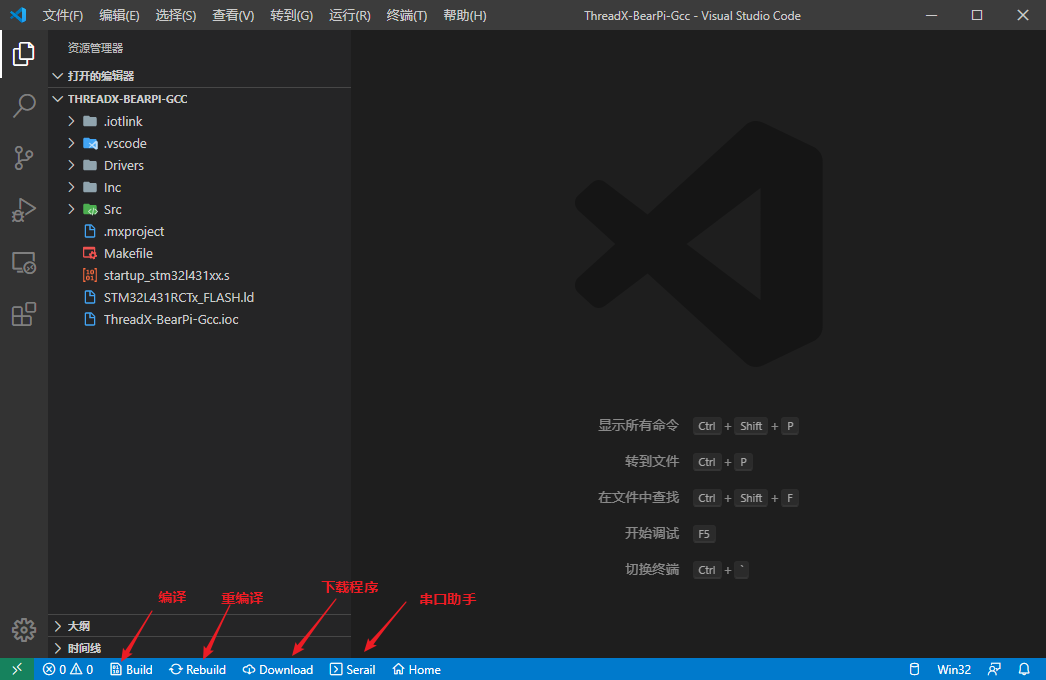
2.4. 测试裸机工程是否正常
打开usart.c
,添加将printf重定向到串口1的代码:
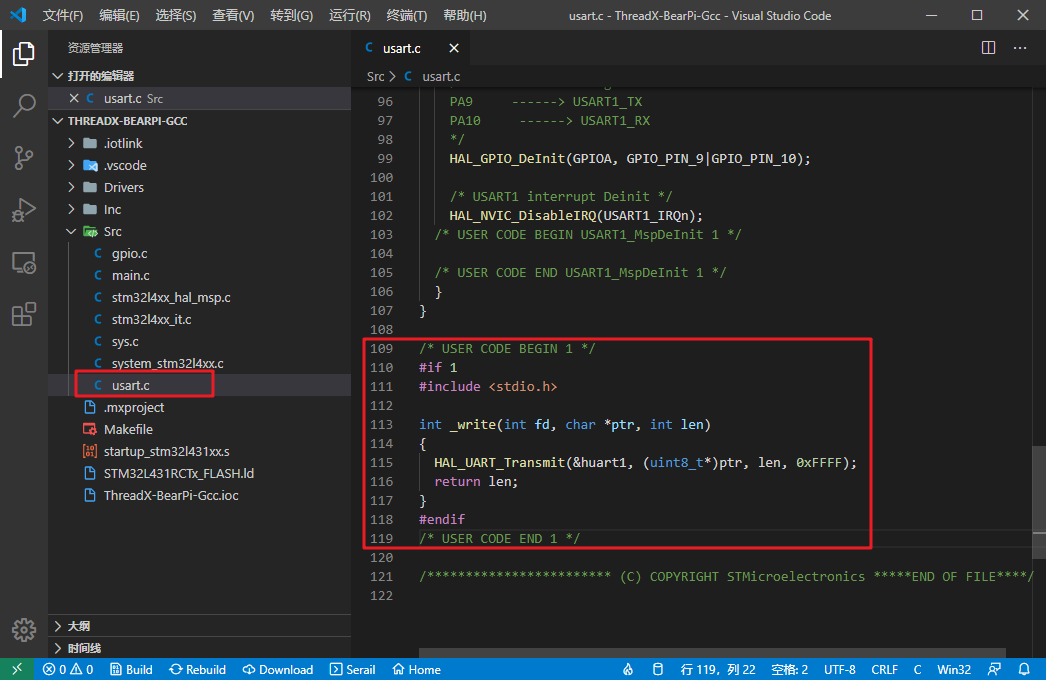
/* USER CODE BEGIN 1 */#if 1#include int _write(int fd, char *ptr, int len) { HAL_UART_Transmit(&huart1, (uint8_t*)ptr, len, 0xFFFF);return len;}#endif/* USER CODE END 1 */main.c
中添加头文件
/* USER CODE BEGIN 2 */printf("ThreadX RTOS Port by Mculover666\r\n")/* USER CODE END 2 */点击下方的Build按钮开始编译,编译成功之后如图所示: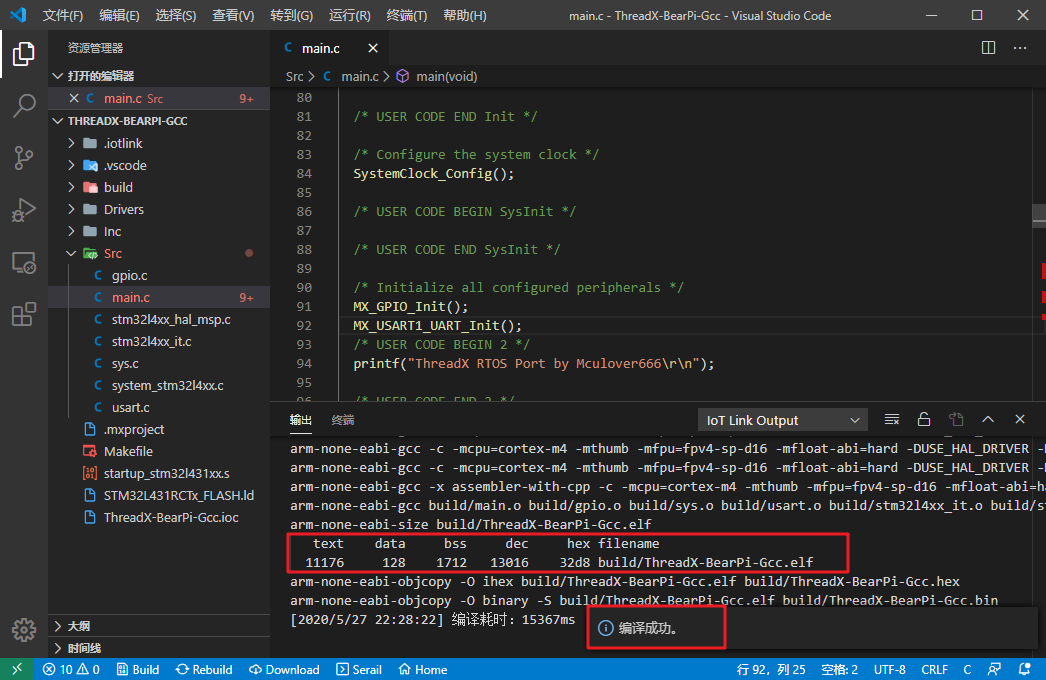 如果编译失败,请重复之前的导入工程步骤。
如果编译失败,请重复之前的导入工程步骤。
接下来连接小熊派开发板到电脑,点击下载按钮: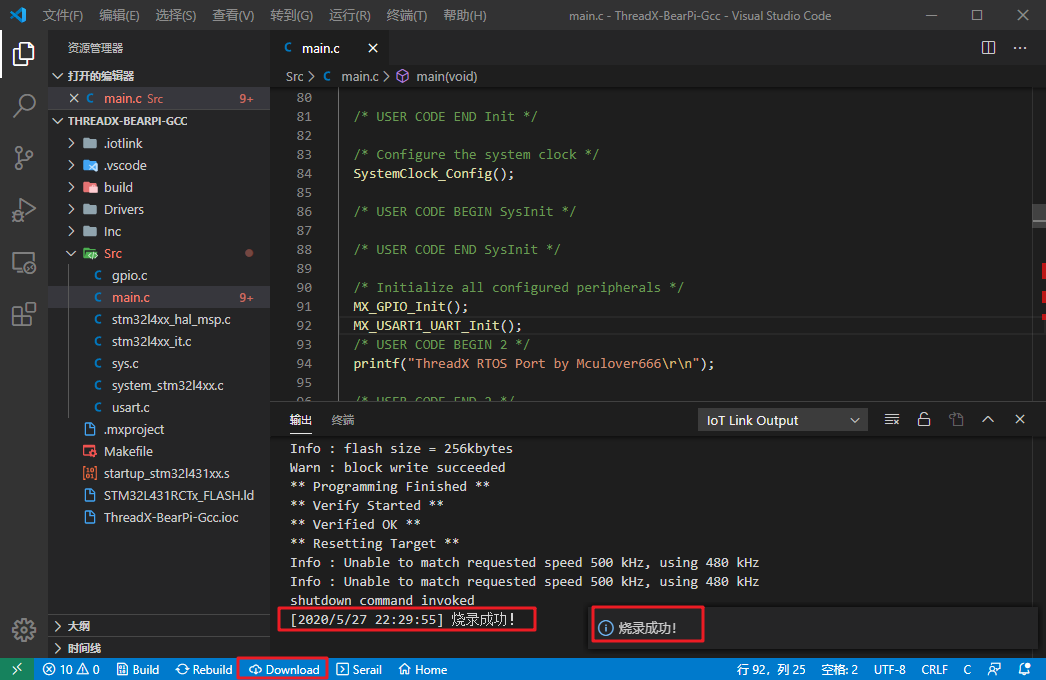 下载成功之后,点击下方的Serial按钮,选择小熊派开发板的串口,在VSCode中打开串口终端:
下载成功之后,点击下方的Serial按钮,选择小熊派开发板的串口,在VSCode中打开串口终端: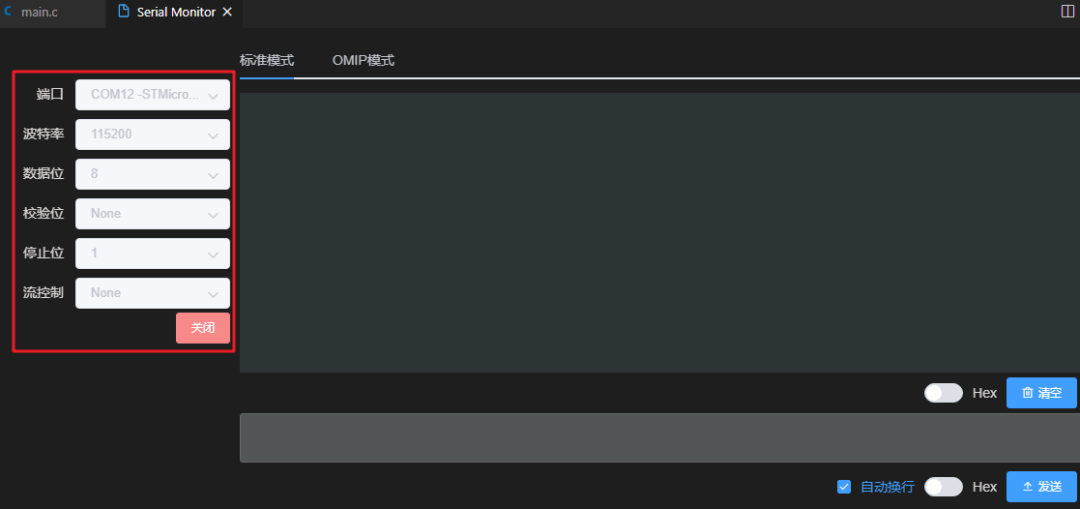 按下小熊派复位按钮,即可看到正常打印的数据:
按下小熊派复位按钮,即可看到正常打印的数据: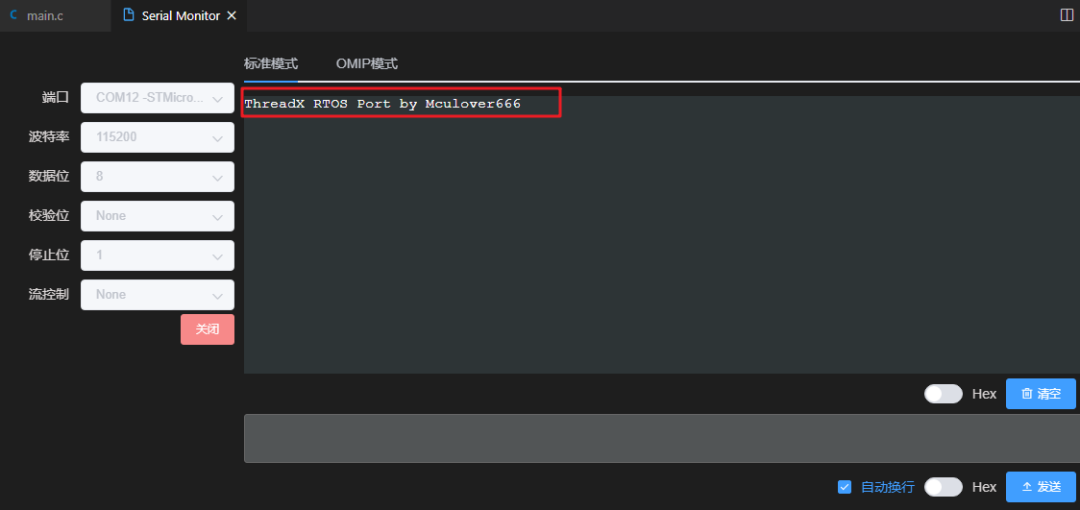 printf测试可以正常使用之后,接下来开始移植今天的主角——threadX操作系统。
printf测试可以正常使用之后,接下来开始移植今天的主角——threadX操作系统。
三、移植threadX操作系统
3. 移植threadX操作系统
3.1. 下载内核源码
内核源码可以在官方的GIthub下载: https://github.com/azure-rtos/threadx 将源码中的common和ports文件夹复制到工程中:
3.2. 修改makefile
makefile文件是make工具使用的文件,描述了整个工程的编译构建关系。 修改makefile,将threadX的相关文件加入到makefile里。① 添加common/src下的所有C文件到C_SOURCES变量中: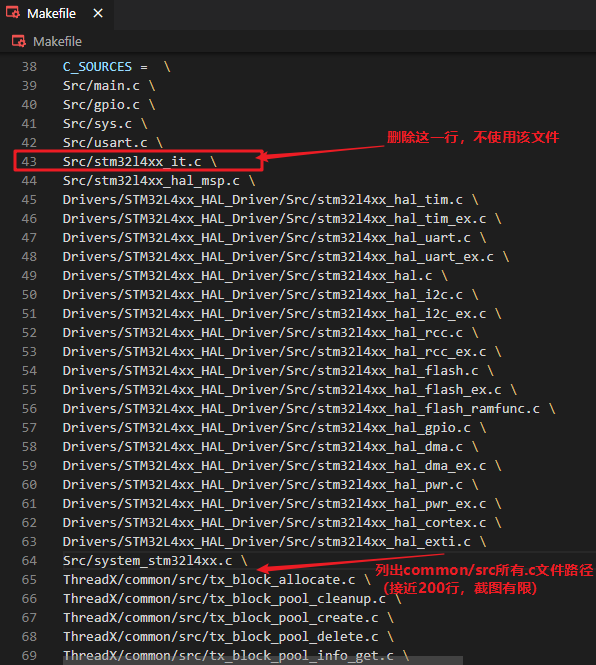 ② 小熊派的内核是Cortex-M4,所以添加
② 小熊派的内核是Cortex-M4,所以添加ports/cortex_m4/gnu/src下的所有.S文件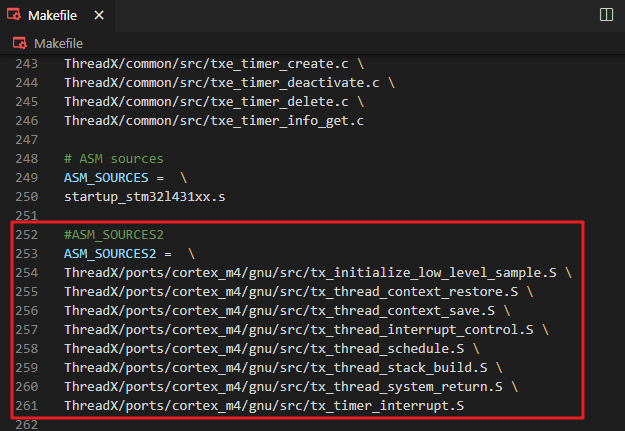 因为
因为.s文件是直接汇编文件,.S文件需要进行预处理之后才能汇编,两者编译时有区别,所以使用两个变量进行区分。
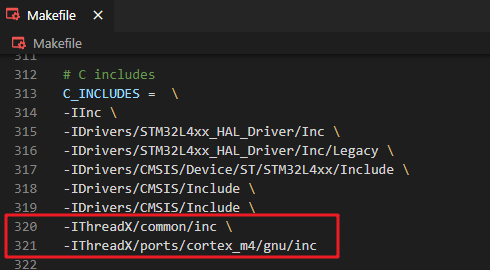
common/inc
和
ports/cortex_m4/gnu/inc
两个头文件路径添加:
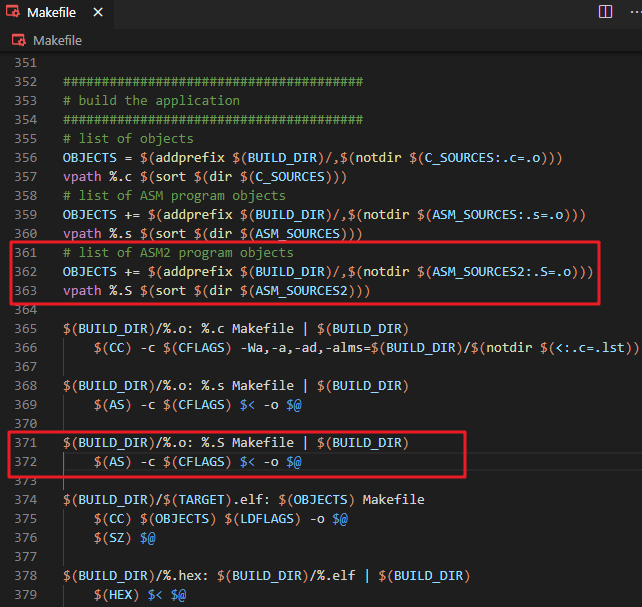
 ④ 编写
④ 编写
.S
文件的编译规则:
 至此,makefile修改完成,但是还不能编译。
至此,makefile修改完成,但是还不能编译。
3.3. 适配小熊派开发板
在threadX底层初始化汇编文件中有两个全局变量: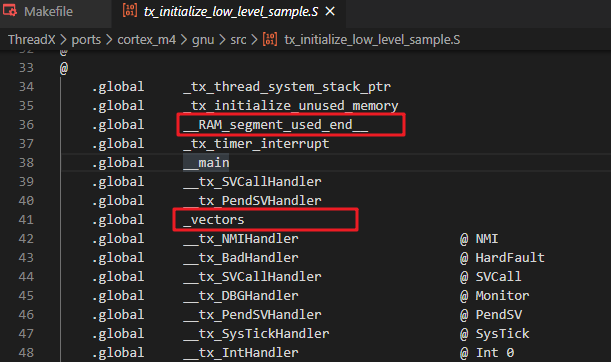 这两个值需要我们根据不同的平台来自己定义。
这两个值需要我们根据不同的平台来自己定义。
startup_stm32l431xx.s
,声明中断向量表_vectors标号是全局的:
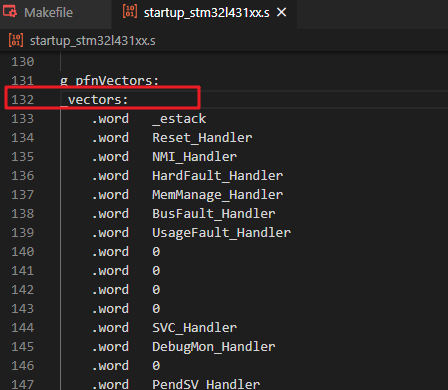
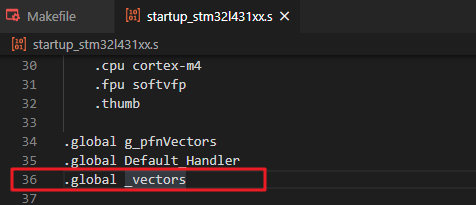 将此标号位置添加到中断向量表处:
将此标号位置添加到中断向量表处:
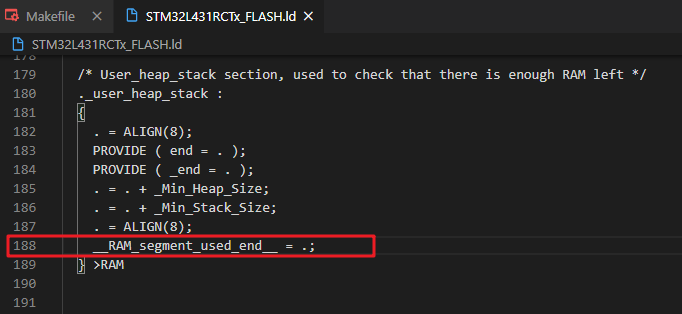
 ② 修改stm32链接文件
② 修改stm32链接文件
STM32L431RCTx_FLASH.ld
,添加此标号所表示的位置:
3.4. 修改时钟频率
找到threadX的底层初始化汇编文件tx_initialize_low_level_sample.S,修改系统主频为80Mhz,修改系统tick为1000个tick: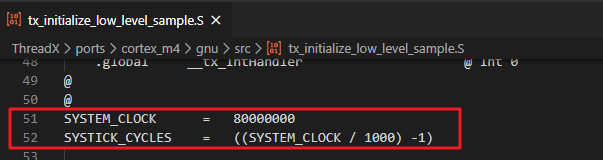 此时点击下方Build按钮开始编译:
此时点击下方Build按钮开始编译: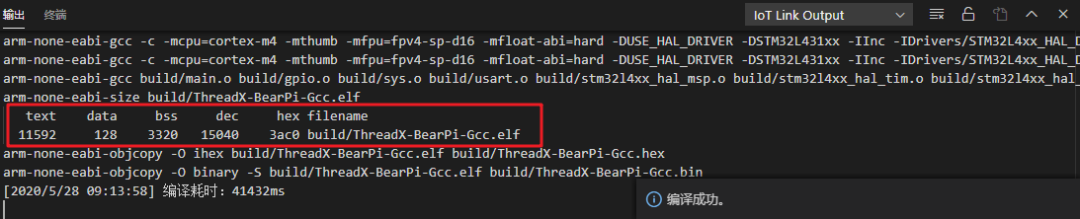 编译成功,证明移植没有问题。
编译成功,证明移植没有问题。
四、环境搭建
4. 编写threadX应用代码
在main.c
中编写创建两个不同优先级任务运行的应用代码,观察是否可以正常切换任务、演示。
① 引入头文件:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include
#include "tx_api.h"
/* USER CODE END Includes */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
TX_THREAD my_thread1;
TX_THREAD my_thread2;
void my_thread1_entry(ULONG thread_input)
{
/* Enter into a forever loop. */
while(1)
{
printf("threadx 1 application running...\r\n");
/* Sleep for 1 tick. */
tx_thread_sleep(1000);
}
}
void my_thread2_entry(ULONG thread_input)
{
/* Enter into a forever loop. */
while(1)
{
printf("threadx 2 application running...\r\n");
/* Sleep for 1 tick. */
tx_thread_sleep(1000);
}
}
void tx_application_define(void *first_unused_memory)
{
/* Create my_thread! */
tx_thread_create(&my_thread1, "My Thread 1",
my_thread1_entry, 0x1234, first_unused_memory, 1024, 3, 3, TX_NO_TIME_SLICE, TX_AUTO_START);
tx_thread_create(&my_thread2, "My Thread 2",
my_thread2_entry, 0x1234, first_unused_memory+1024, 1024, 1, 1, TX_NO_TIME_SLICE, TX_AUTO_START);
}
/* USER CODE BEGIN 2 */
printf("ThreadX RTOS Port By Mculover666\r\n");
/* Enter the ThreadX kernel. */
tx_kernel_enter( );
/* USER CODE END 2 */
再次点击Build按钮编译,编译成功: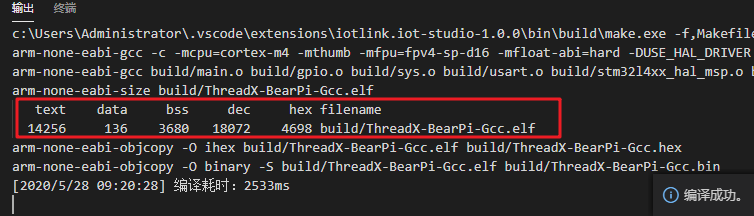 接上小熊派开发板,点击下方的Download按钮,烧录成功:
接上小熊派开发板,点击下方的Download按钮,烧录成功: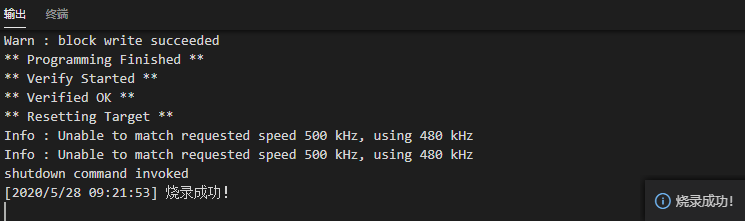 点击下方Serial,在VScode打开串口终端,查看串口输出:
点击下方Serial,在VScode打开串口终端,查看串口输出: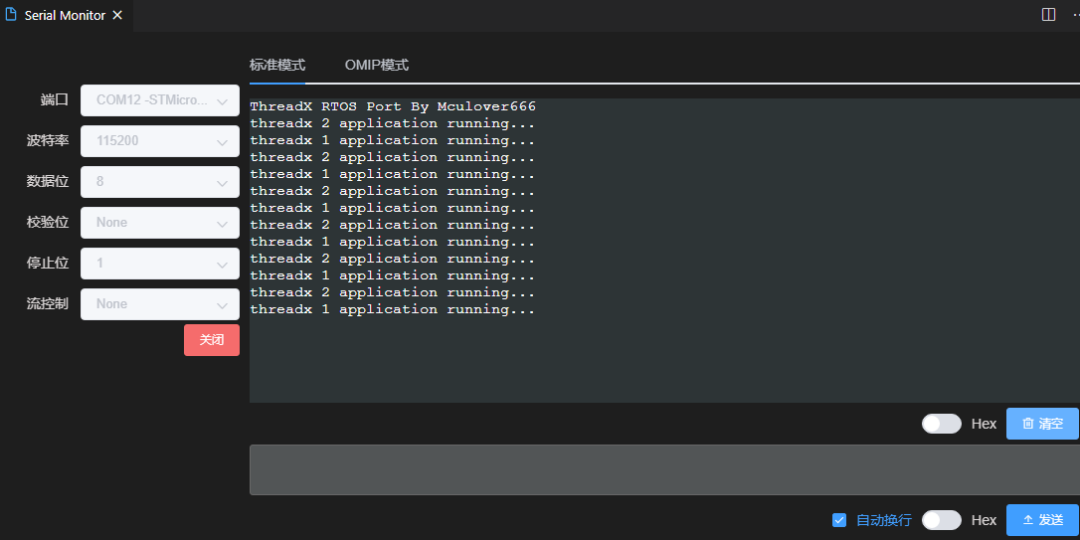 1s打印一次,并且两个任务切换运行,任务2的优先级高于任务1,实现现象和预期一样,至此,threadX移植成功,赶快上手试试吧~
1s打印一次,并且两个任务切换运行,任务2的优先级高于任务1,实现现象和预期一样,至此,threadX移植成功,赶快上手试试吧~
本工程源码在公众号后台回复关键词 threadX 获取,下载之后使用iotlink导入到VScode即可编译,下载。














 1308
1308











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









