





本文是出自《无人驾驶车辆模型预测控制》的一些笔记,方便自己的查看和加深对原理、程序的理解(实际上这个工程实例我也没完全理解,总觉得有些公式和程序对不上的感觉)
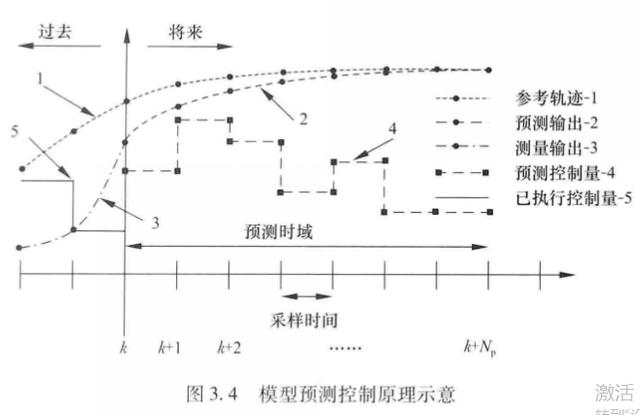
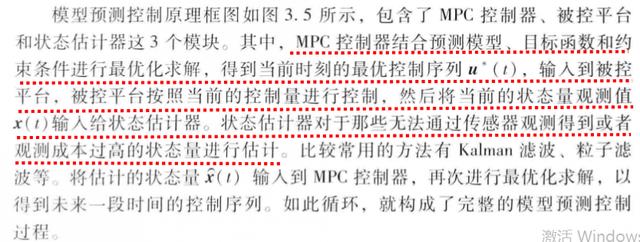
MPC的原理图
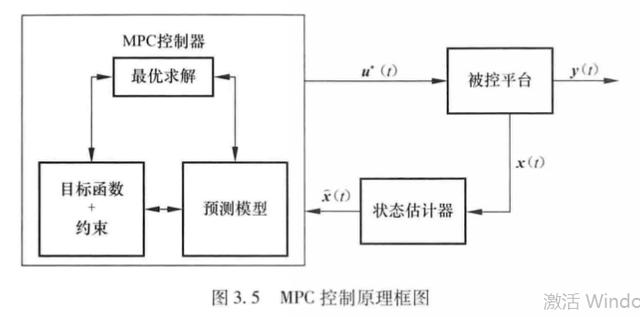
必要的文字描述
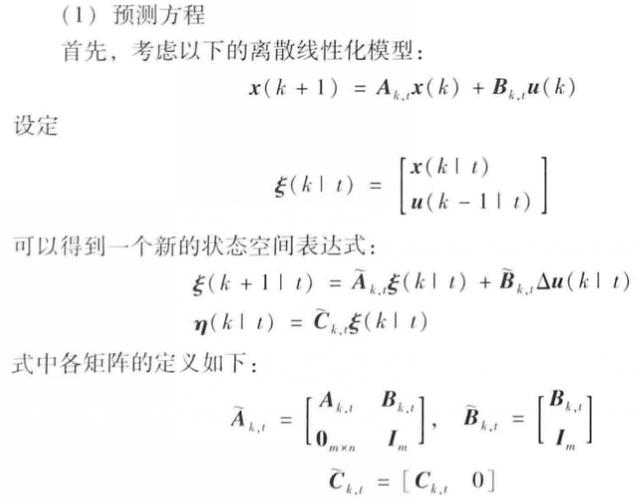
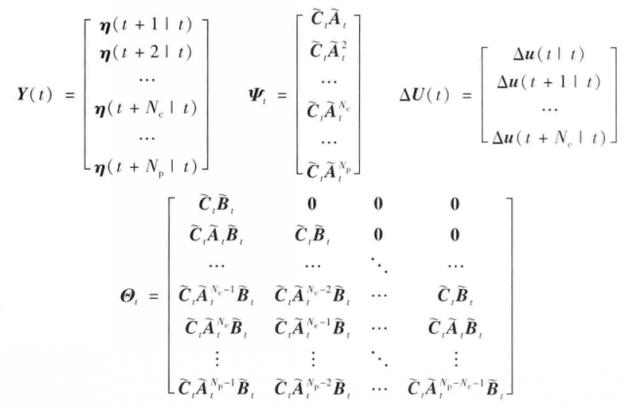
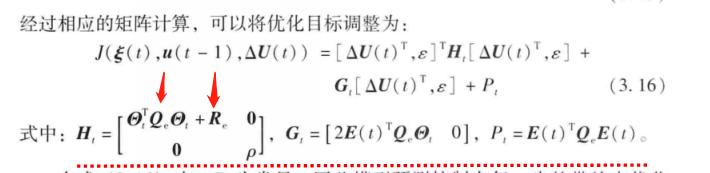
一些公式推导
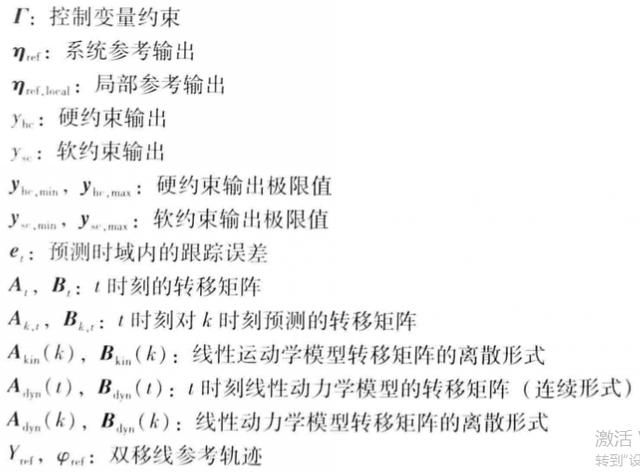
- 一些变量定义的意思

- 模型的建立


工程实例
- 题目:车辆从原点(0,0)出发,以期望纵向速度v = 1 m/s跟踪一条直线轨迹 y = 2,采样时间50ms,仿真设定总时间为20s。
- 预测模型的建立:

由于上面没有说明控制变量是啥,所以翻看第二章,控制变量应该是车速v和前轮偏角。但是这个A、B是咋推导出来的我不太明白。
- 代码记录
- 参考轨迹生成:
%% 参考轨迹生成N=100;%100个点T=0.05;%采样时间% Xout=zeros(2*N,3);% Tout=zeros(2*N,1);Xout=zeros(N,3);Tout=zeros(N,1);for k=1:1:N Xout(k,1)=k*T;%x坐标,每个采样时间x前进一个点 Xout(k,2)=2;%y坐标,保持为2 Xout(k,3)=0;%航向角保持为0 Tout(k,1)=(k-1)*T;end- 控制系统的参数初始化部分
%% Tracking a constant reference trajectoryNx=3;%状态量个数Nu =2;%控制量个数Tsim =20;%仿真时间题目说20s,我觉得这里可以理解为这里的控制时域,预测时域,都是20X0 = [0 0 pi/3];%初始的状态量,原点0,0,航向角为60度[Nr,Nc] = size(Xout); % Nr is the number of rows of Xout% Mobile Robot Parametersc = [1 0 0 0;0 1 0 0;0 0 1 0;0 0 0 1];%好像没啥用,先不管L = 1;Rr = 1;w = 1;% Mobile Robot variable Modelvd1 = Rr*w; % For circular trajectory参考系统的纵向速度vd2 = 0;%参考系统的前轮偏角x_real=zeros(Nr,Nc);%Nr行数,参考点的个数100,Nc列数,3,所以是100*3x_piao=zeros(Nr,Nc);%定义偏差矩阵x_piao,100*3u_real=zeros(Nr,2);%控制量的真实矩阵u_piao=zeros(Nr,2);%控制量的偏差矩阵x_real(1,:)=X0;%初试化状态,起点是0,0,前轮偏角是60度x_piao(1,:)=x_real(1,:)-Xout(1,:);%初始化状态偏差X_PIAO=zeros(Nr,Nx*Tsim);%X_PIAO矩阵,囊括每一个时间步的预测增量,因为Tsim=20,所以大小为100,3*20XXX=zeros(Nr,Nx*Tsim);%XXX矩阵,用于保持每个时刻预测的所有状态值,每一个状态都会有Tsim个预测值,所以每一个状态一共有20个预测值q=[1 0 0;0 1 0;0 0 0.5];%权重矩阵Q_cell=cell(Tsim,Tsim);%20*20个元胞数组- 初始化大Q和大R,对应下面公式的Qe、Re
for i=1:1:Tsim for j=1:1:Tsim if i==j Q_cell{i,j}=q; else Q_cell{i,j}=zeros(Nx,Nx);%初始化Q_cell矩阵 end endendQ=cell2mat(Q_cell);R=0.1*eye(Nu*Tsim,Nu*Tsim);%大小为2*20,2*20- 关键部分的迭代计算
B对应下面这个矩阵,C应该就是1
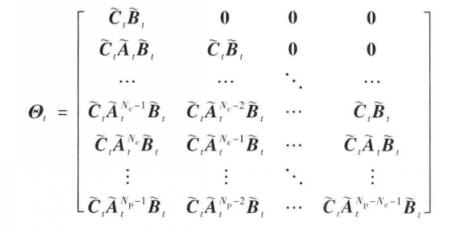

for i=1:1:Nr t_d =Xout(i,3); a=[1 0 -vd1*sin(t_d)*T; 0 1 vd1*cos(t_d)*T; 0 0 1;]; b=[cos(t_d)*T 0; sin(t_d)*T 0; 0 T;]; A_cell=cell(Tsim,1);%20*1,20行1列个元胞矩阵 B_cell=cell(Tsim,Tsim);%20*20,20行20列个元胞矩阵 for j=1:1:Tsim A_cell{j,1}=a^j;%先给个A^j,每个cell是3*3,一共20个,A是60*3 for k=1:1:Tsim if k<=j B_cell{j,k}=(a^(j-k))*b; else B_cell{j,k}=zeros(Nx,Nu);%如果行号小于列号,就是0 end end end A=cell2mat(A_cell);%60*3 B=cell2mat(B_cell);%B是大θt H=2*(B'*Q*B+R);%这里乘2不知何意,应该没有加松弛因子,跟书本有出入 f=2*B'*Q*A*x_piao(i,:)';%这里着实不太理解为何多了一个A A_cons=[]; b_cons=[]; lb=[-1;-1]; ub=[1;1]; tic [X,fval(i,1),exitflag(i,1),output(i,1)]=quadprog(H,f,A_cons,b_cons,[],[],lb,ub);%X是一个100*21的预测矩阵,每一个行对应每一个状态点-在每一个时刻的控制序列 toc X_PIAO(i,:)=(A*x_piao(i,:)'+B*X)';%A*偏差+B*控制序列,更新预测增量大矩阵 if i+j- 最后画图
%% 以下为绘图部分figure(2)subplot(3,1,1);plot(Tout(1:Nr),Xout(1:Nr,1),'k--');hold on;plot(Tout(1:Nr),x_real(1:Nr,1),'k');%grid on;%title('状态量-横向坐标X对比');xlabel('采样时间T');ylabel('横向位置X')subplot(3,1,2);plot(Tout(1:Nr),Xout(1:Nr,2),'k--');hold on;plot(Tout(1:Nr),x_real(1:Nr,2),'k');%grid on;%title('状态量-横向坐标Y对比');xlabel('采样时间T');ylabel('纵向位置Y')subplot(3,1,3);plot(Tout(1:Nr),Xout(1:Nr,3),'k--');hold on;plot(Tout(1:Nr),x_real(1:Nr,3),'k');%grid on;hold on;%title('状态量-heta对比');xlabel('采样时间T');ylabel('heta')figure(3)subplot(2,1,1);plot(Tout(1:Nr),u_real(1:Nr,1),'k');%grid on;%title('控制量-纵向速度v对比');xlabel('采样时间T');ylabel('纵向速度')subplot(2,1,2)plot(Tout(1:Nr),u_real(1:Nr,2),'k');%grid on;%title('控制量-角加速度对比');xlabel('采样时间T');ylabel('角加速度')figure(4)subplot(3,1,1);plot(Tout(1:Nr),x_piao(1:Nr,1),'k');%grid on;xlabel('采样时间T');ylabel('e(x)');subplot(3,1,2);plot(Tout(1:Nr),x_piao(1:Nr,2),'k');%grid on;xlabel('采样时间T');ylabel('e(y)');subplot(3,1,3);plot(Tout(1:Nr),x_piao(1:Nr,3),'k');%grid on;xlabel('采样时间T');ylabel('e(heta)');总结一下
这段代码的核心部分实在是太迷了,还是我自己太菜了,唉,我再多看看资料,加油~~~















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









