







Proceedings of the 37th Chinese Control Conference
July 25-27, 2018, Wuhan,
作者:李晏,张榜,陈辛波,杭鹏
摘要:四轮独立转向电动车(4WIS EV)具有低速机动性强、高速稳定性好的特点,是一种理想的智能型车辆。解决车辆的轨迹跟踪控制问题是实现智能化交通的重要组成部分,本文针对4WIS EV,基于模型预测控制(MPC)算法进行了路径跟踪控制研究。
首先,基于简化的二自由度车辆动力学模型,对4WIS EV在四轮转向模式下的稳态转向进行几何学分析,并推导出车辆质心侧偏角为零时前轮转角与后轮转角的几何关系;再者,基于车辆运动学模型,设计了采用MPC算法的路径跟踪控制器,为提高车辆跟踪过程中的稳定性和准确性,对车辆前后轮转角进行主动转向控制。最后,为了验证所设计模型预测控制器的有效性和可靠性,选择成熟的商用动力学仿真软件Carsim与Matlab/Simulink构建联合仿真平台,以低速泊车为工况,在不同的行驶速度和设计参数下进行仿真,结果表明所设计的MPC算法具有良好的鲁棒性和可靠性。
关键词: 四轮独立转向, 电动车, 模型预测控制, 路径跟踪
1 引言
随着车辆主动安全技术的快速发展,自动驾驶技术已成为智能交通系统研究的热点问题。路径跟踪是地面自主车辆的基本能力与首要任务,目前对无人驾驶汽车的研究大多基于传统的内燃机,少量企业如特斯拉等对电动汽车展开智能驾驶研究,汽车电动化是未来的发展趋势,电动汽车的智能化更是大势所趋。四轮独立转向电动车(4WIS EV)是一种具有多执行器、多控制自由度的特殊车辆,具有可控自由度大、机动性和稳定性高等特点,四个车轮的转向均可单独控制,可实现主动前后轮控制、直接横摆力矩控制等,是一种理想的无人驾驶汽车车型[1-2]。路径跟踪要求跟踪误差尽可能小,目前路径跟踪控制算法主要有最优控制、PID控制、滑模控制、鲁棒控制、模糊控制、模型预测控制等[3-7]。PID控制简单实用,但对车辆特性变化的鲁棒性不强;而最优控制和鲁棒控制等方法,控制算法设计复杂,不易在控制器中实现,且算法对模型的精度依赖性高。而模型预测控制(MPC)是一种基于简单模型进行滚动优化控制的算法,相比于其他控制方法,模型预测控制最明显的优点是对模型的精度要求不高,且能在控制过程中增加多种约束,通过目标函数可同时控制多个系统变量,具有建模直观、动态响应快等优点,在车辆控制领域上有着比较广泛的应用[8]。本文以4WIS EV为研究对象,建立了其在低速行驶时的运动学模型。其次,基于模型预测控制算法,设计了一种在多个非线性约束条件下的路径跟踪控制器,轨迹跟踪过程中只对车辆的前后轮转角进行控制,而保持车辆的纵向速度不变,通过 Matlab/Simulink 与 Carsim 联合仿真,验证了所设计控制算法在不同行驶工况和设计参数下的路径跟踪性能,仿真结果表明所设计的MPC算法具有良好的鲁棒性和可靠性。
2 四轮独立转向电动车系统建模
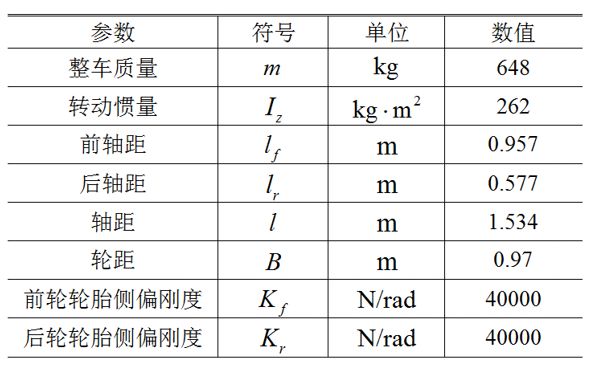
本文以一种新型4WIS EV样车为研究对象,如图1所示,该车主要由四组下图2所示的一体化线控独立转向/驱动模块所组成,该模块集成了悬架系统、驱制动系统和转向系统,如图3所示。一体化线控独立转向/驱动模块的搭载使得该车四个车轮的转向角度都独立可控,控制冗余自由度更多,控制策略选择更具多样化,更有利于发挥出色的动力学性能,整车参数如表1所示。

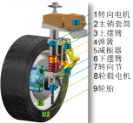
图1: 4WIS EV 样车 图2: 一体化模块



转向模块 悬架模块 驱动模块
图3: 一体化线控独立转向/驱动模块
表1.整车参数
2.1 几何学分析与动力学模型
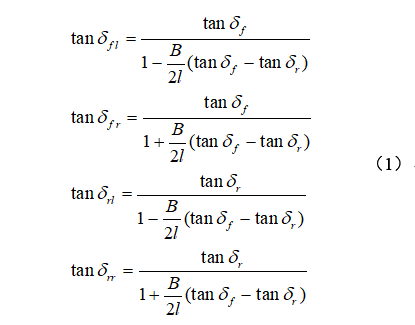
如图4所示是车辆简化单轨模型,由转向过程中车轮转角满足Ackerman转角定律,推导得出车辆实际四个车轮的转角 (i=fl,fr,rl,rr分别表示前左轮、前右轮、后左轮、后右轮)与单轨模型前后转角(
(i=fl,fr,rl,rr分别表示前左轮、前右轮、后左轮、后右轮)与单轨模型前后转角( )之间的关系可表述为
)之间的关系可表述为
由于所设计的控制器是对轨迹跟踪过程中的前轮偏角进行主动控制,因此需要确定四轮转向模式下, 与
与 的关系,
的关系,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3180
3180











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









