






四轮转向汽车Carsim-simulink联合仿真滑模控制模型(.cpar文件 .slx文件)
包含驾驶员模型,二自由度车辆模型,相关文献,技术文档
ID:1760753529450426
TB_62378491

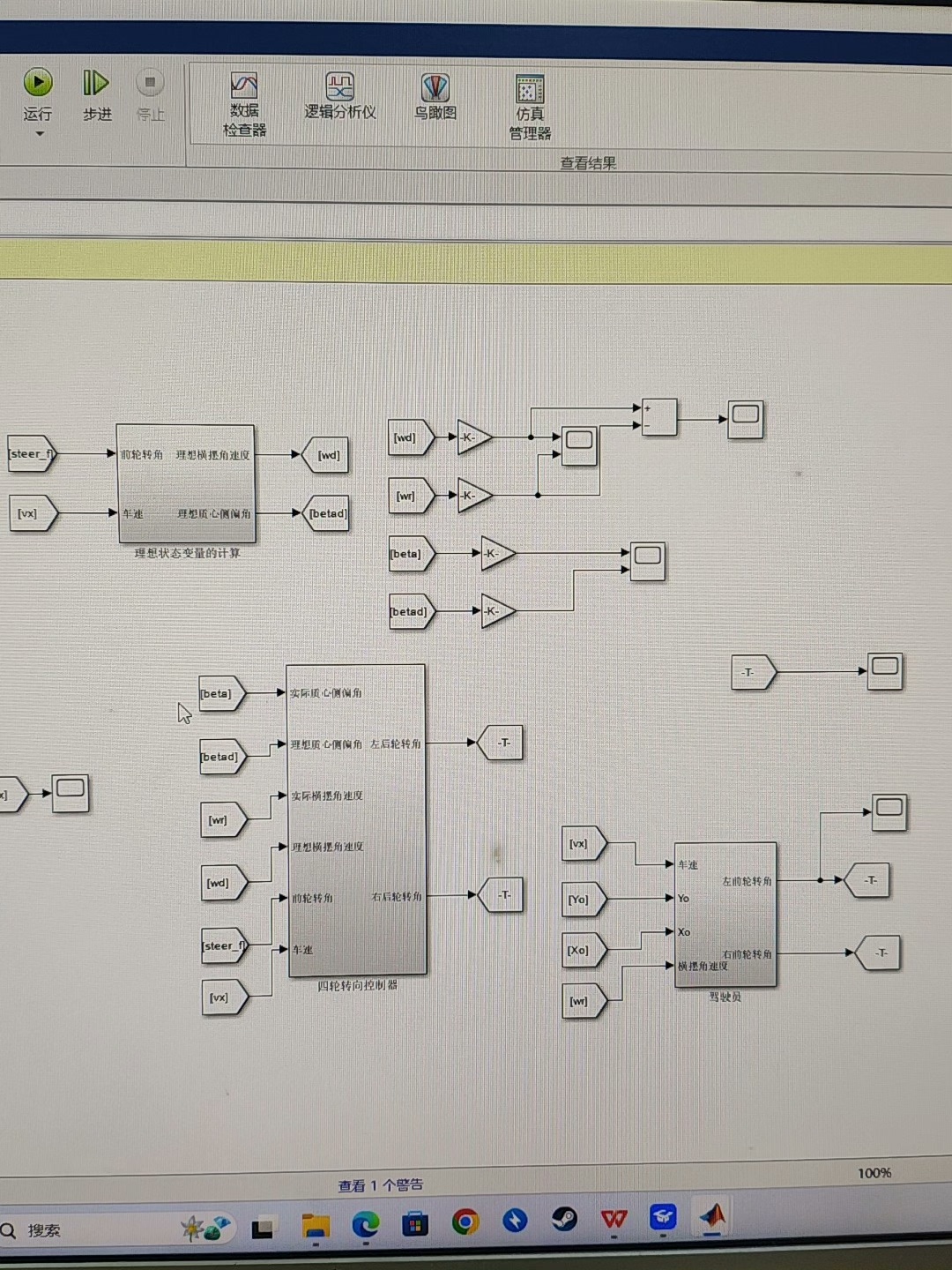
四轮转向汽车是一种具有较高操控性能的车辆,通过将前后两对轮子分别转向来实现更好的转弯性能和稳定性。为了对这种汽车的操控性能进行评估和改进,研究人员开发了一个Carsim-simulink联合仿真滑模控制模型。该模型包含了驾驶员模型、二自由度车辆模型以及相关的文献和技术文档,能够提供全面的仿真环境和基于滑模控制的操控算法。
在该模型中,驾驶员模型起到了关键的作用。它通过对驾驶员的操控动作进行建模,将其转化为对车辆的控制指令。驾驶员模型考虑了人的生理特征和行为习惯等因素,能够模拟真实驾驶员的操控行为。通过与二自由度车辆模型的结合,驾驶员模型能够实时生成适合当前驾驶条件的控制指令,为后续的控制策略提供基础。
二自由度车辆模型是该模型的核心部分,它基于汽车动力学理论,对汽车在运动过程中的各种力和力矩进行建模。通过考虑汽车的质量、惯性、悬挂系统、轮胎特性等因素,二自由度车辆模型能够准确地描述汽车的运动状态。在联合仿真中,该车辆模型与驾驶员模型进行紧密的协同工作,实时传递车辆的状态信息和控制指令,为滑模控制算法的实施提供准确的输入。
在滑模控制模型中,滑模控制算法作为一种高效且稳定的控制策略,能够在面对不确定性和干扰时仍能保持良好的控制性能。滑模控制算法基于滑模面的设计,通过对系统状态的跟踪和控制来实现期望的性能。在这个模型中,滑模控制算法被应用于驱动力和转向角的控制,以提供更好的操控性能和稳定性。
除了模型本身,该联合仿真模型还包含了相关的文献和技术文档,以供用户参考和学习。这些文献和技术文档涵盖了四轮转向汽车、滑模控制算法以及联合仿真技术的基本原理和应用案例,能够帮助用户更好地理解和应用该模型。
综上所述,Carsim-simulink联合仿真滑模控制模型是一种用于评估和改进四轮转向汽车操控性能的工具。通过驾驶员模型、二自由度车辆模型和滑模控制算法的协同工作,该模型能够提供准确的仿真环境和高效的操控策略。相关的文献和技术文档能够帮助用户更好地理解和应用该模型,为汽车操控性能的改进提供技术支持。希望该模型能够为汽车工程师和研究人员提供有价值的参考和指导,推动四轮转向汽车操控性能的进一步发展与提升。
以上相关代码,程序地址:http://fansik.cn/753529450426.html
















 1240
1240











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









