







 作者 |安布奇责编 | 胡巍巍本文干货满满,主要以一个单摆为例,讲述如何进行物理建模。58张实操图,手把手带你学会Simscape Multibody物理建模与刚体变换!创建模型在MatLab命令行输入smnew,打开一个新的simscape multibody项目。在命令行输入sm_lib,打开Simscape Multibody block library选择自己想要添加的块。创建...
作者 |安布奇责编 | 胡巍巍本文干货满满,主要以一个单摆为例,讲述如何进行物理建模。58张实操图,手把手带你学会Simscape Multibody物理建模与刚体变换!创建模型在MatLab命令行输入smnew,打开一个新的simscape multibody项目。在命令行输入sm_lib,打开Simscape Multibody block library选择自己想要添加的块。创建...


作者 | 安布奇
责编 | 胡巍巍
本文干货满满,主要以一个单摆为例,讲述如何进行物理建模。58张实操图,手把手带你学会Simscape Multibody物理建模与刚体变换!

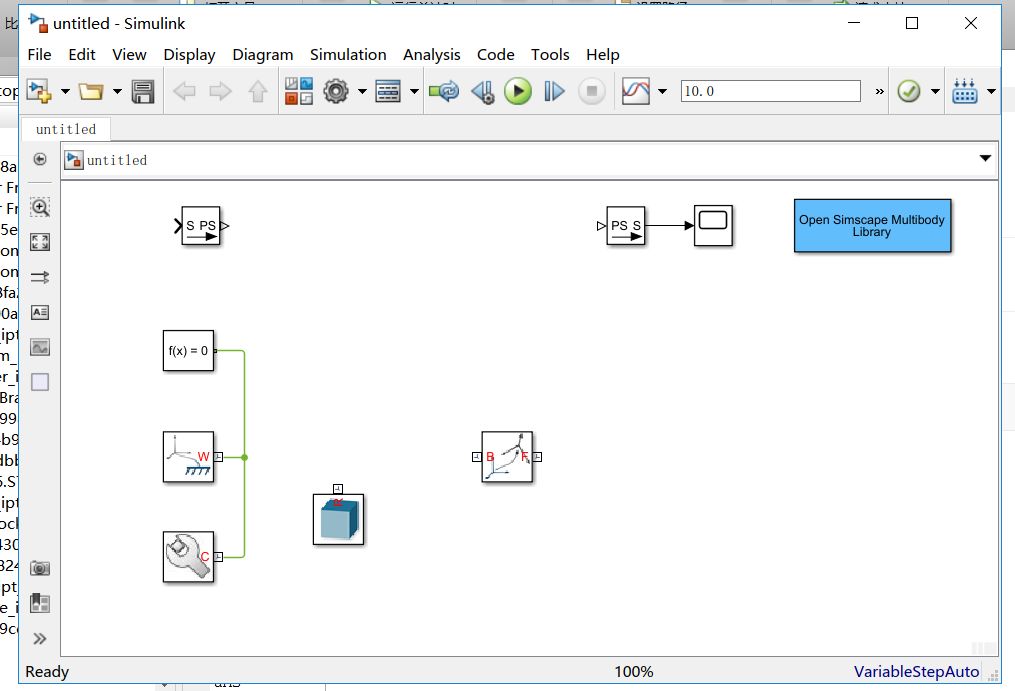
创建模型
在MatLab命令行输入smnew,打开一个新的simscape multibody项目。
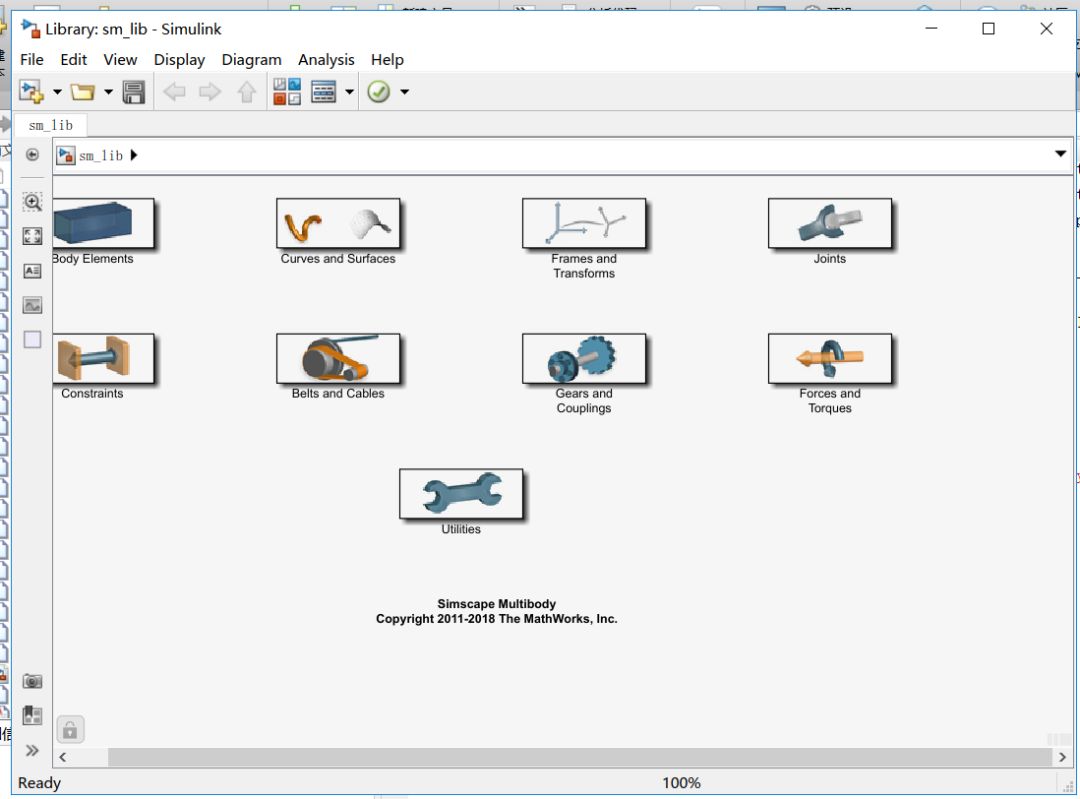
在命令行输入sm_lib,打开Simscape Multibody block library选择自己想要添加的块。

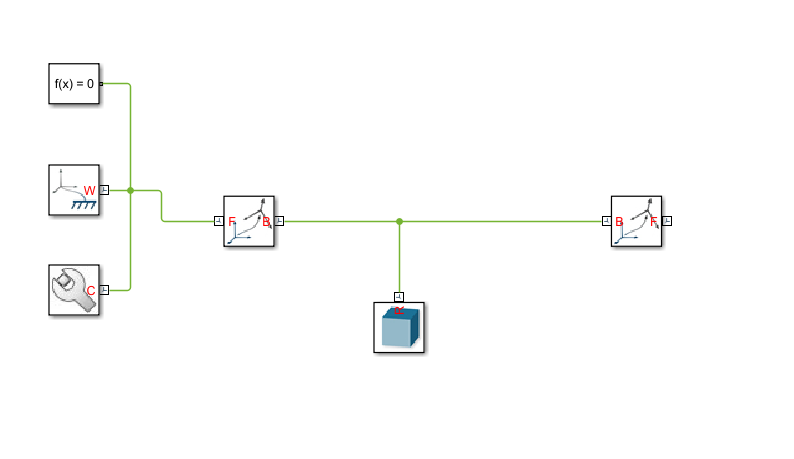
创建机械连接
块类型说明:
Rigid Transform(刚体变换)块:提供端坐标系。
Solid(立体)块:提供几何(geometry),惯性(inertia),颜色(color)特性。
Rigid Transform块在Frame and Transform 下,Solid块在Body Element下。
连接块图:
设置Solid block 特性:
左键快速单击solid block两次,在弹出的对话框中将参数设置为如下图所示:
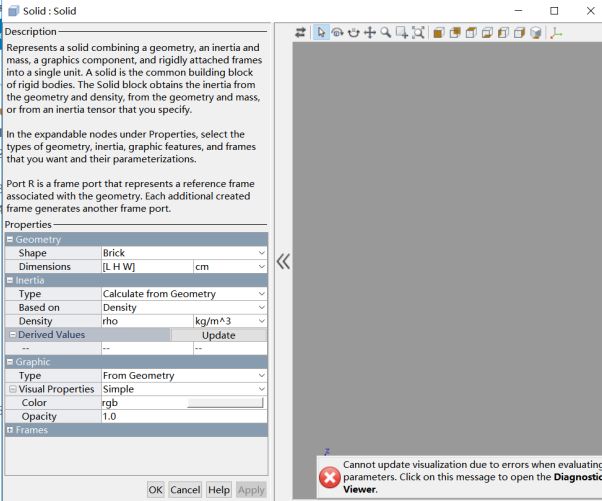
将长宽高用变量LHW代替,密度用rho代替,颜色用rgb代替,方便修改参数。这里出现错误是因为我们输入的变量未定义,将在下面定义。
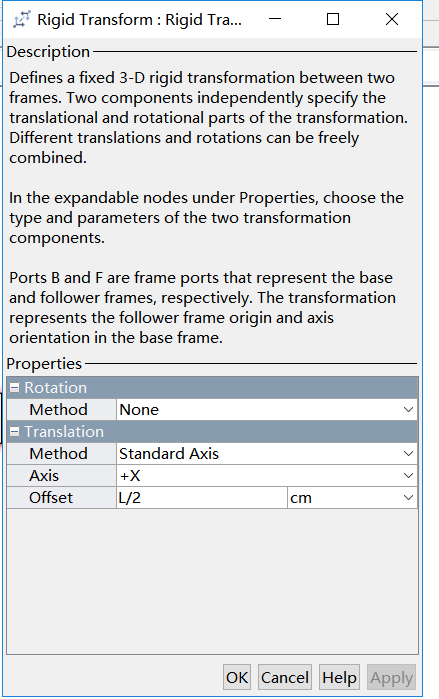
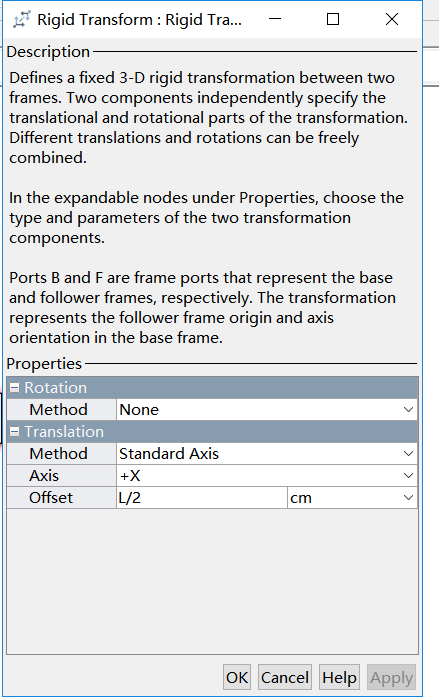
设置Rigid Transform块:
左键快速单击Rigid Transform block,在弹出的对话框中将参数设置为如下图所示:
将Rigid Transform 设置为如下图所示:
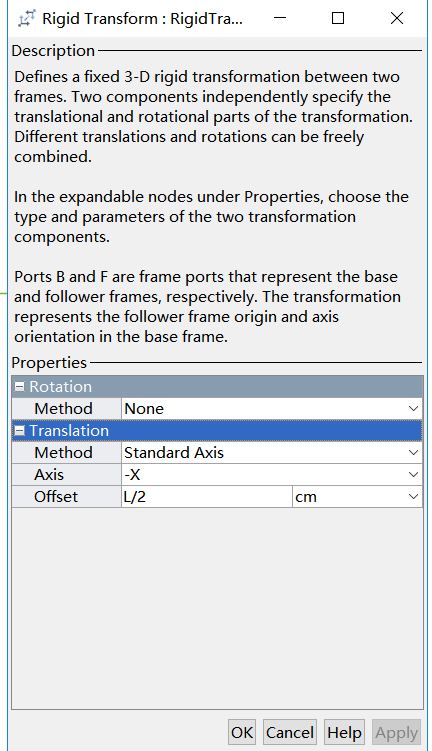
将Rigid Transform1 设置为如下图所示:
生成子系统:
同时选中Rigid Transform,Rigid Transform1和solid block,在高亮的地方右键选择Create Subsystem from Selection:
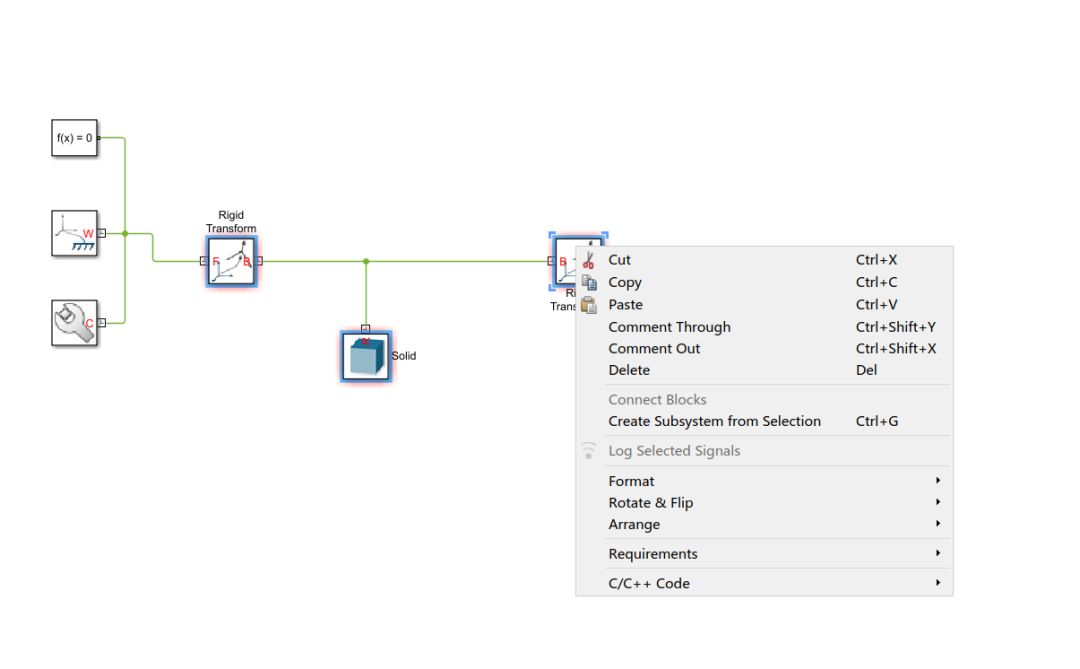
得到如下所示子系统:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1627
1627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









