





获取点附近的所有Poly
detour真正计算寻路的时候用的是Poly,即凸多边形。为了计算起点所在的Poly,我们首先需要将起点扩张为一个长方体,因为坐标点可能并不在寻路表面上。扩张为长方体之后,调用findNearestPoly来获取离这个长方体最近的Poly,而这个函数其实就是queryPolygons的一个封装:
dtStatus dtNavMeshQuery::queryPolygons(const float* center, const float* halfExtents,
const dtQueryFilter* filter, dtPolyQuery* query) const
{
float bmin[3], bmax[3];
dtVsub(bmin, center, halfExtents);
dtVadd(bmax, center, halfExtents);
// Find tiles the query touches. 根据AABB来计算所有可能相交的Tile
int minx, miny, maxx, maxy;
m_nav->calcTileLoc(bmin, &minx, &miny);
m_nav->calcTileLoc(bmax, &maxx, &maxy);
static const int MAX_NEIS = 32;
const dtMeshTile* neis[MAX_NEIS];
for (int y = miny; y <= maxy; ++y)
{
for (int x = minx; x <= maxx; ++x)
{
// 获取所有以当前tile为中心的多层邻接tile
const int nneis = m_nav->getTilesAt(x,y,neis,MAX_NEIS);
for (int j = 0; j < nneis; ++j)
{
// 然后查询一个tile里面与当前长方体相交的多边形
queryPolygonsInTile(neis[j], bmin, bmax, filter, query);
}
}
}
return DT_SUCCESS;
}
queryPolygonsInTile是查询Tile内特定矩形会被哪些Poly覆盖的接口:
int dtNavMesh::queryPolygonsInTile(const dtMeshTile* tile, const float* qmin, const float* qmax,
dtPolyRef* polys, const int maxPolys) const
{
if(tile->bvTree)
{
//使用bvtree来加速查询
// 相关知识参考 http://www.pbr-book.org/3ed-2018/Primitives_and_Intersection_Acceleration/Bounding_Volume_Hierarchies.html
}
else
{
// 暴力遍历所有的poly 计算是否aabb相交
float bmin[3], bmax[3];
int n = 0;
dtPolyRef base = getPolyRefBase(tile);
for (int i = 0; i < tile->header->polyCount; ++i)
{
dtPoly* p = &tile->polys[i];
// Do not return off-mesh connection polygons.
if (p->getType() == DT_POLYTYPE_OFFMESH_CONNECTION)
continue;
// Calc polygon bounds.
const float* v = &tile->verts[p->verts[0]*3];
dtVcopy(bmin, v);
dtVcopy(bmax, v);
for (int j = 1; j < p->vertCount; ++j)
{
v = &tile->verts[p->verts[j]*3];
dtVmin(bmin, v);
dtVmax(bmax, v);
}
if (dtOverlapBounds(qmin,qmax, bmin,bmax))
{
if (n < maxPolys)
polys[n++] = base | (dtPolyRef)i;
}
}
return n;
}
}
筛选最近的Poly
通过上面两步获取了所有与目标长方体区域相交的Poly之后,选择里面离目标点最短的Poly。这个流程说起来简单,但是还是有很多层的调用:
1. 首先我们需要解决的是一个点到一个Triangle上的投影距离是多少,对应的接口为dtClosestHeightPointTriangle,如果不在这个Triangle的正上方,则返回False。 2. 根据这个投影距离,来获得一个Poly与特定点之间的最短距离,对应接口为getPolyHeight,原理就是遍历这个Poly内的所有Triangle调用投影距离接口来比较,所以不在Poly上方的时候,这个接口也是返回False的
3. 如果不在正上方,则判断是否是OffMeshLink,如果是的话则直接计算当前点到这个Link的最短点,否则计算当前点与当前Poly里所有边的最短距离点,这里的距离都是线段最短距离,调用的都是dtDistancePtSegSqr2D
4. 计算好一个Poly到一个点的最短距离点之后,根据前面计算出来的所有相交Poly筛选出距离最短的,作为这个点的归属Poly。
获取Poly路径
获取了来源Poly和目标Poly之后,我们需要获取一条消耗较少的Poly路径来联通两头的Poly,这里我们可以做两个额外的标记:
1. 给特定类型的Area赋予不同类型的cost,例如平地为1, 游泳为2, 泥巴路为20等等
2. 标记特定类型的Poly不能选中,或者只能选中特定类型的Poly
这些标记信息会组合成一个dtQueryFilter作为参数传入到所有的寻路请求里, 这个类型提供了两个接口来实现对应的功能:
1. getCost 计算同一个Poly里的两点直线距离的cost
2. passFilter 判断一个Poly是否通过类型限制过滤,作为待选路径
在得到了效用函数之后然后,我们开始做最短路径的查找,相应的代码在dtNavMeshQuery::findPath, 采用的算法是A*,启发函数为三维距离乘以一个启发因子,源码里设置为0.999,如果设置为0,则就退回到了基础的单源最短路径算法。而这里的cost计算则,需要ParentNode、CurrentNode、NextNode三个Node的信息。首先取ParentNode和CurrentNode连接的边,计算边的中点,然后取CurrentNode和NextNode连接的边,计算边的中点,两条边的中点的距离乘以AreaCost,作为当前路径经过CurrentNode的cost。这样的计算就带来了一个问题,从一个Poly的不同边进出的cost是不同的,因此不能把一个Poly当作路径图里的一个节点,而应该把一个Poly及进入这个Poly的边组合起来当作一个节点,所以源码里生成新节点是这么计算的, 里面的crossSide就是进入的边编号:
dtNode* neighbourNode = m_nodePool->getNode(neighbourRef, crossSide);
对于OffMeshLink来说,这个其实并不是一个完整的Poly,他其实算是一条线段,所以计算cost的时候直接计算前一条边与当前Link的一个端点距离即可。
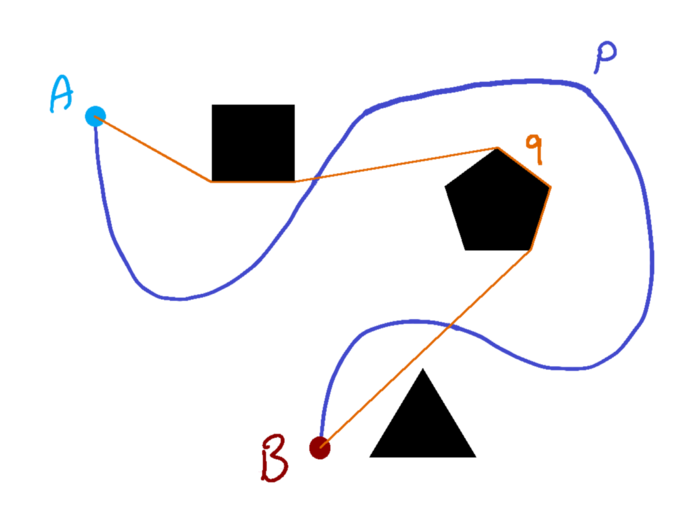
生成寻路路点
在上面的过程中,完成了Poly列表的生成之后,我们需要构造一条最优的通过特定Poly列表的线段列表,来让寻路agent按照这个线段列表开始寻路,这段代码在dtNavMeshQuery::findStraightPath里,作者称这个为String Pulling方法。从下面的图中就可以大概了解所谓的拉绳过程了:
这个算法执行的是一个贪心过程,算法目标是计算出路径中所有的拐点,也就是线段之间的连接点。我们的目的是尽可能的减少拐点,以达到路径平滑同时路径最短的目的。 下图就是算法的贪心流程:
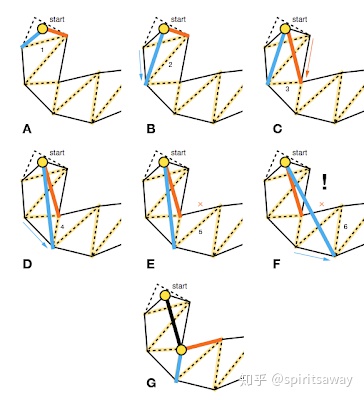
初始的时候我们需要如下参数:
1. start 作为寻路的起点
2. left right 作为中间临时变量 他们与start围成的三角形记录可行走区域
3. polys记录剩下的还未探索的Poly
初始时可以把left right 设置为第一个Poly边上的两点, 即A图。接下来,需要依次移动左右两条表,按顺序处理路径上的Poly。每次遇到一条新的边,考察这个边的left2 right2与start之间的连线与原来的left right线段之间的关系。其实left2 right2总是会有一个点与left right重合,所以只需要考虑新加入的节点即可。
1. 如果新加入的节点与start之间的线段与原来的left->right线段相交,则更新left right为left2, right2,即缩小可行走三角形区域 如上图中的B, C,D
2. 不相交的话,我们需要将left right里与left2 right2重合的点设置为拐点,加入到拐点路径里, 然后将这个点当作新的start,下一条Poly边的left right作为新的left right,一路迭代下去, 如图F G
如果算法过程中遇到的Poly是一个OffMeshLink,则将这个Link的端点作为拐点保存,然后以Link的另外一个端点作为新的start开始流程。















 704
704











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









