






上篇推文介绍了基于51单片机的智能GSM垃圾桶,本篇推文将以电光学院“星火杯”中的优秀作品——循迹避阻电动小车为例,介绍以51单片机为控制核心来实现对传感器的控制。
循迹避阻电动小车设计原理
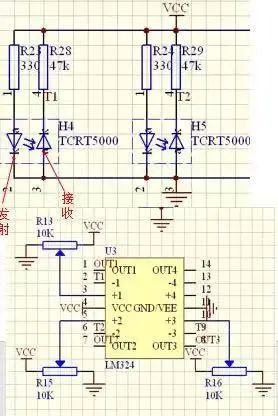
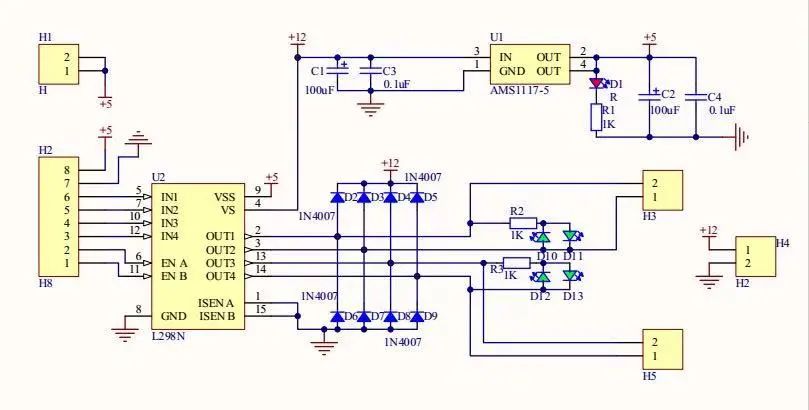
本设计是一种基于单片机控制的简易自动寻迹避阻小车系统,包括小车系统构成软硬件设计方法。小车以51单片机为控制核心,用单片机产生PWM波,控制小车速度。利用红外光电传感器对路面黑色轨迹进行检测,将路面检测信号反馈给单片机。其技术关键是单片机对传感器的控制及对其反馈信息处理后对电机的精确控制。我们在车身上安装了红外传感器,动作指示灯,以及反应小车运行时间的计时显示模块。
小车的每一个动作都会有相应的指示灯。小车能够灵敏检测路面情况并作出准确的判断。小车采用前轮驱动,前轮左右两边各有一个电机驱动,通过调整前面两个轮子的转速启停而达到控制转向的目的,后轮是万向轮起支撑的作用,将循迹传感器装在车体的中间和左右轮前,当车身左边的传感器检测到黑线时,主控芯片控制左轮减速,车身向左修正。当车身右边的传感器检测到黑线时,主控芯片控制右轮减速,车身向右修正。从而实现循迹功能。 对的各个不同的运动速度和方向,小车都有相应的指示灯显示。 核心控制部分采用可在线编程的51单片机,可以在不增加系统硬件的情况下方便地对系统进行二次开发。
控制传感器模块程序示例
#include //包含51单片机相关的头文件
#include
sbit LeftLed=P2^0; //定义前方左侧指示灯端口
sbit RightLed=P0^7; //定义前方右侧指示灯端口
sbit FontLled=P1^7;
sbit LeftIR=P3^5; //定义前方左侧红外探头端口
sbit RightIR=P3^6; //定义前方右侧红外探头端口
sbit FontIR=P3^7; //定义前方正前方红外探头端口
sbit M1A=P0^0; //定义左侧电机驱动A端
sbit M1B=P0^1; //定义左侧电机驱动B端
sbit M2A=P0^2; //定义右侧电机驱动A端
sbit M2B=P0^3; //定义右侧电机驱动B端
sbit B1=P0^4; //定义语音识别传感器端口
sbit SB1=P0^6; //定义蜂鸣器端口
sbit IRIN=P3^3; //定义红外接收端口
unsigned char code LedShowData[]={0x03,0x9F,0x25,0x0D,0x99, //定义数码管显示数据
0x49,0x41,0x1F,0x01,0x19};//0,1,2,3,4,5,6,7,8,9
unsigned char code RecvData[]={0x19,0x46,0x15,0x43,0x44,0x40,0x0D,0x0E,0x00,0x0F};
unsigned char IRCOM[7];
static unsigned int LedFlash; //定义闪动频率计数变量
bit EnableLight=0; //定义指示灯使能位
#define ShowPort P2 //定义数码管显示端口
unsigned char temp = 1;
void tingzhi()
{
M1A=0; //将M1电机A端初始化为0
M1B=0; //将M1电机B端初始化为0
M2A=0; //将M2电机A端初始化为0
M2B=0;
}
void qianjin()
{
M1A=1;
M1B=0;
M2A=1;
M2B=0;
}
void houtui()
{
M1A=0;
M1B=1;
M2A=0;
M2B=1;
}
void zuozhuan()
{
M1A=0;
M1B=1;
M2A=1;
M2B=0;
}
void youzhuan()
{
M1A=1;
M1B=0;
M2A=0;
M2B=1;
}
void Delay1ms(unsigned int i)
{
unsigned char j,k;
do{
j = 10;
do{
k = 50;
do{
_nop_();
}while(--k);
}while(--j);
}while(--i);
}
void delay_nus(unsigned int i) //延时:i>=12 ,i的最小延时单12 us
{
i=i/10;
while(--i);
}
void delay_nms(unsigned int n) //延时n ms
{
n=n+1;
while(--n)
delay_nus(900); //延时 1ms,同时进行补偿
}
void delayms(unsigned char x) //0.14mS延时程序
{
unsigned char i; //定义临时变量
while(x--) //延时时间循环
{
for (i = 0; i<13; i++) {} //14mS延时
}
}
void Delay() //定义延时子程序
{
unsigned int DelayTime=30000; //定义延时时间变量
while(DelayTime--); //开始进行延时循环
return; //子程序返回
}
void ControlCar(unsigned char ConType) //定义电机控制子程序
{
tingzhi();
switch(ConType) //判断用户设定电机形式
{
case 1: //前进;判断用户是否选择形式1
{
tingzhi();//进入前进之前,先停止一段时间,防止电机反向电压冲击主板导致系统复位
Delay1ms(50);
LeftLed = 0 ;
qianjin();
break;
}
case 2: //后退;判断用户是否选择形式2
{
tingzhi();//进入后退之前,先停止一段时间,防止电机反向电压冲击主板导致系统复位
Delay1ms(50);
LeftLed = 1 ;
houtui(); //M2电机反转
break;
}
case 3: //左转;判断用户是否选择形式3
{
tingzhi();//进入左转之前,先停止一段时间,防止电机反向电压冲击主板导致系统复位
Delay1ms(50);
zuozhuan(); //M2电机正转
break;
}
case 4: //右转;判断用户是否选择形式4
{
tingzhi(); //进入右转之前,先停止一段时间,防止电机反向电压冲击主板导致系统复位
Delay1ms(50);
youzhuan(); //M1电机正转
//M2电机反转
break;
}
case 8: //停止;判断用户是否选择形式8
{
tingzhi();
break; //退出当前选择
}
}
}
void ControlCar_yaokong(unsigned char ConType) //定义电机控制子程序 (红外遥控单独设置一个 switch case 语句 )
{
tingzhi();
switch(ConType) //判断用户设定电机形式
{
case 1: //前进;判断用户是否选择形式1
{
tingzhi(); //进入前进之前,先停止一段时间,防止电机反向电压冲击主板,导致系统复位
Delay1ms(150);
LeftLed = 0 ;
qianjin();
break;
}
case 2: //后退;判断用户是否选择形式2
{
tingzhi();//进入后退之前,先停止一段时间,防止电机反向电压冲击主板,导致系统复位
Delay1ms(150);
LeftLed = 1 ;
houtui(); //M2电机反转
break;
}
case 3: //左转;判断用户是否选择形式3
{
tingzhi();//进入左转之前,先停止一段时间,防止电机反向电压冲击主板,导致系统复位
Delay1ms(150);
zuozhuan(); //M2电机正转
break;
}
case 4: //右转;判断用户是否选择形式4
{
tingzhi();//进入右转之前,先停止一段时间,防止电机反向电压冲击主板,导致系统复位
Delay1ms(150);
youzhuan(); //M1电机正转 //M2电机反转
break;
}
case 8: //停止;判断用户是否选择形式8
{
tingzhi();
break; //退出当前选择
}
}
}
void Robot_Avoidance() //机器人避障子程序
{
LeftLed=LeftIR; //前方左侧指示灯指示出前方左侧红外探头状态
RightLed=RightIR; //前方右侧指示灯指示出前方右侧红外探头状态
FontLled= FontIR;
SB1=FontIR;
if(FontIR == 0) //如果前面避障传感器检测到障碍物
{
ControlCar(8); //停止
delay_nms (300); //停止300MS;防止电机反相电压冲击导致系统复位
ControlCar(2); //后退
delay_nms (1000); //后退1500MS
ControlCar(3);
delay_nms (1800);
}
else
{
ControlCar(1); //右侧没有信号时,开始向左转一定的角度
delay_nms (10);
}
ControlCar(1);
}
//机器人循迹子程序
void Robot_Traction()
{
LeftLed=LeftIR; //前方左侧指示灯指示出前方左侧红外探头状态
RightLed=RightIR; //前方右侧指示灯指示出前方右侧红外探头状态
FontLled= FontIR;
SB1=LeftIR;
if(LeftIR == 0 && RightIR == 0) //三个红外检测到黑线,就前进
{
ControlCar(1); //左侧没有信号时,开始向右转一定的角度
delay_nms (10);
}
else if(LeftIR == 0 && RightIR == 1)
{
ControlCar(3); //右侧没有信号时,开始向左转一定的角度
delay_nms (10);
}
else if(LeftIR == 1 && RightIR == 0)
{
ControlCar(4); //右侧没有信号时,开始向左转一定的角度
delay_nms (10);
}
ControlCar(8);
}
void main() //主程序入口
{
bit RunFlag=0; //定义小车运行标志位
LedFlash=3000; //对闪灯数据进行初始化
EX1=1; //同意开启外部中断1
IT1=1; //设定外部中断1为低边缘触发类型
EA=1; //总中断开启
ControlCar(8); //初始化小车运行状态
while(1) //程序主循环
{
if(P3_2 == 0)
{
delay_nms(10);
if(P3_2 == 0)
{
temp++;
while(!P3_2);
}
}
if(temp > 3)
{
temp = 1;
}
switch(temp)
{
case 1: ShowPort = LedShowData[1];Robot_Traction();EX1 = 0;break;
case 2: ShowPort = LedShowData[2];Robot_Avoidance();EX1 = 0;break;
case 3: ShowPort = LedShowData[3];EX1 = 1;break;
}
}
}
本次推文主要介绍了单片机对传感器的控制及对其反馈信息处理后对电机的精确控制的原理,同学们还可以自己尝试进行编程学习。后续的推文还将继续介绍51单片机其他模块的使用。
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









