






上篇推文简单介绍了51单片机的构造与制作LED灯的基础编程,本次推文将通过51单片机在电光学院“星火杯”光电设计大赛中的实际应用进一步展示其制作和使用方法。
竞赛题目:光电智能小车
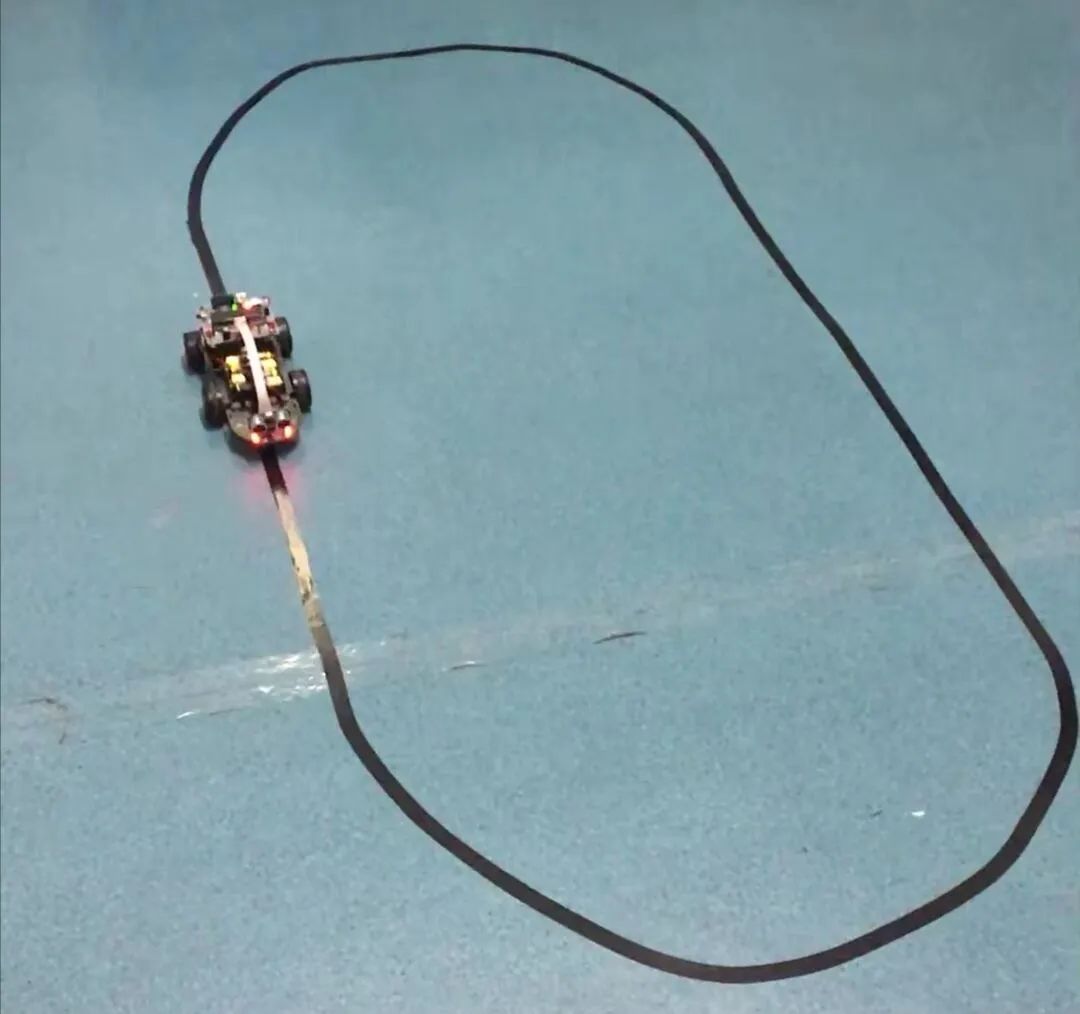
竞赛内容:在一片空地用黑胶布规划出一个七根直线段组成的8字形赛道,在道路的上设置隧道,道路两侧会摆放路障,同时在每一个三线节点设置两个红绿灯。
红绿灯具体规则:
双红:小车需要停下。
双绿:小车沿直线行走。
一红一绿:小车90度左拐。
题目要求:小车在规划的路线下,计算并记录出沿途轨道障碍物的数量,同时按照红绿灯的要求行走。

基于C51单片机的智能小车
(一)功能介绍:
小车在行驶时,红外发射管发射红外线信号,经白色反射时,被接收管接收,接收管接收到信号,输出端输出低电频;红外线信号被黑色吸收时,输出高电频,从而实现了通过红线检测信号的功能。
发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,信号输出接口输出数字信号(一个低电频信号)
发射器发出超声波,在接触到物体后,反射至接收器。通过计算时间差来进行距离判断。
左右光敏传感器同时检测到光源时前进,左侧没有信号时,开始向右转一定的角度,右侧没有信号时,开始向左转一定的角度。
利用单片机作为控制核心,使用红外线发射和接收器件、编码解码芯片和无线收发模块.实现遥控小车的运动轨迹。
(二)循迹程序:
#include //包含51单片机相关的头文件
sbit LeftLed=P2^0; //定义前方左侧指示灯端口
sbit RightLed=P0^7; //定义前方右侧指示灯端口
sbit FontLled=P1^0;sbit LeftIR=P3^5; //定义前方左侧红外探头端口
sbit RightIR=P3^6; //定义前方右侧红外探头端口
sbit FontIR=P3^7; //定义前方正前方红外探头端口
sbit M1A=P0^0; //定义左侧电机驱动A端
sbit M1B=P0^1; //定义左侧电机驱动B端
sbit M2A=P0^2; //定义右侧电机驱动A端
sbit M2B=P0^3; //定义右侧电机驱动B端
sbit B1=P0^4; //定义语音识识别传感器端口
sbit SB1=P0^6; //定义蜂鸣器端口
void tingzhi()
{ M1A=0; //将M1电机A端初始化为0
M1B=0; //将M1电机B端初始化为0
M2A=0; //将M2电机A端初始化为0 M2B=0;
}
void qianjin()
{
M1A=1;
M1B=0;
M2A=1;
M2B=0;
}
void houtui()
{
M1A=0;
M1B=1;
M2A=0;
M2B=1;
}
void zuozhuan()
{ M1A=0;
M1B=1;
M2A=1;
M2B=0;
}
void youzhuan()
{ M1A=1;
M1B=0;
M2A=0;
M2B=1;
}void delay_nus(unsigned int i) //延时:i>=12 ,i的最小延时单12 us
{ i=i/10; while(--i);
}
void delay_nms(unsigned int n) //延时n ms
{ n=n+1;
while(--n)
delay_nus(900); //延时 1ms,同时进行补偿
}
void ControlCar(unsigned char ConType) //定义电机控制子程序
{
tingzhi(); switch(ConType) //判断用户设定电机形式
{ case 1: //前进 //判断用户是否选择形式1
{ qianjin();
break;
}
case 2: //后退 //判断用户是否选择形式2
{ houtui(); //M2电机反转
break; }
case 3: //左转 //判断用户是否选择形式3
{ zuozhuan(); //M2电机正转
break;
}
case 4: //右转 //判断用户是否选择形式4
{ youzhuan(); //M1电机正转 //M2电机反转
break;
}
case 8: //停止 //判断用户是否选择形式8
{
tingzhi();
break; //退出当前选择
}
}
}
void main() //主程序入口
{
bit RunFlag=0; //定义小车运行标志位
//RunShow=0; //初始化显示状态
ControlCar(8); //初始化小车运行状态
while(1) //程序主循环
{ Start:
LeftLed=LeftIR; //前方左侧指示灯指示出前方左侧红外探头状态 RightLed=RightIR; //前方右侧指示灯指示出前方右侧红外探头状态 FontLled= FontIR;
SB1=LeftIR;
if(LeftIR == 0 && RightIR == 0) //三个红外检测到黑线,就前进
{
ControlCar(1); //左侧没有信号时,开始向右转一定的角度 delay_nms (10);
goto NextRun;
}
if(LeftIR == 0 && RightIR == 1)
{ ControlCar(3); //右侧没有信号时,开始向左转一定的角度 delay_nms (10);
goto NextRun;
}
if(LeftIR == 1 && RightIR == 0)
{ ControlCar(4); //右侧没有信号时,开始向左转一定的角度 delay_nms (10);
goto NextRun;
}
goto Start;
NextRun:
ControlCar(8);
}
}
学长学姐经验谈
在开学采购到零件之后,我们利用学校的科创实验室,进行了焊接和拼装。没有进行过电工实习训练的我们,小心翼翼的将每一块电阻,电容焊接了上去。在焊接后本以为大功告成的我们发现真正的问题来了--程序问题。没有实际经验的我们,编写的程序可以通过编译,但小车却始终不执行我们精心编写的程序。我们查阅大量的资料,一点一点模仿,一点一点学习。小车从开始直行到执行各种任务,我们也开始明白了小车的程序的编写方法。但是在编写综合程序时,无论我们怎么改进,依旧不能成功。最后,我们请教了班导老师,在班导的耐心讲解下,明白了自己的错误,成功让小车执行了程序。
本次推文简要介绍了学长学姐的经验和智能小车的黑线循迹功能,同学们可以自己尝试进行编程学习。
















 2409
2409











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









