








10、传感器控制
JOB操作,改变机械手路径和速度(路径校正、速度倍率)
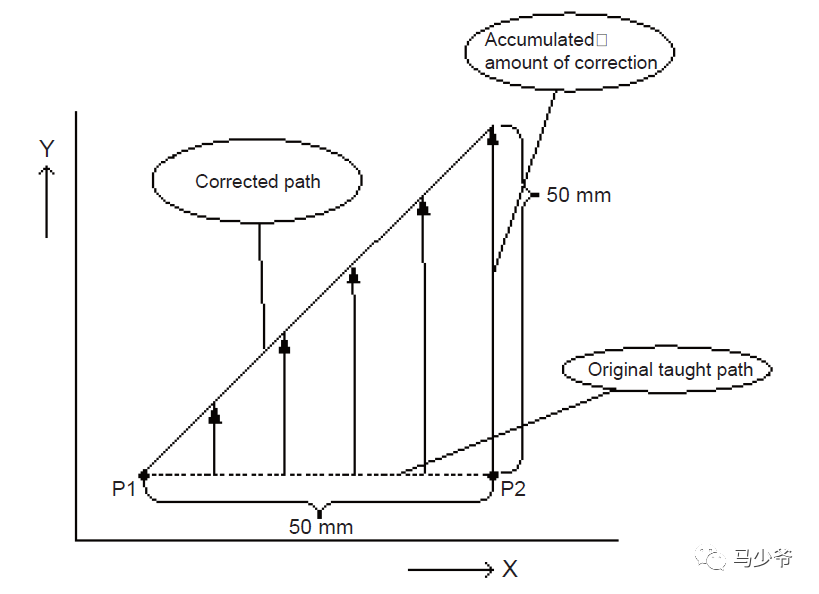
10.1路径校正功能
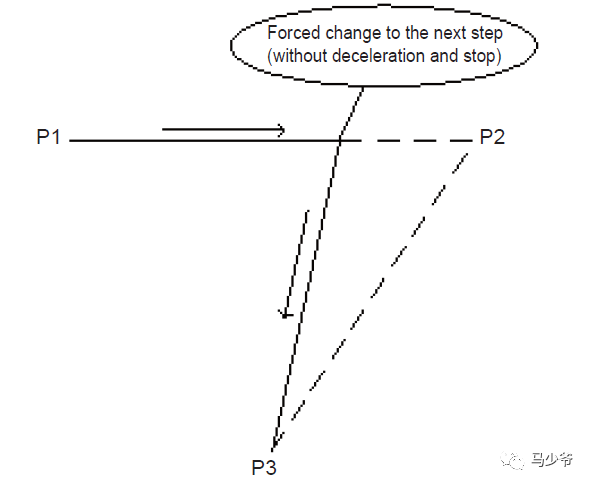
10.2插值运动强行改变功能
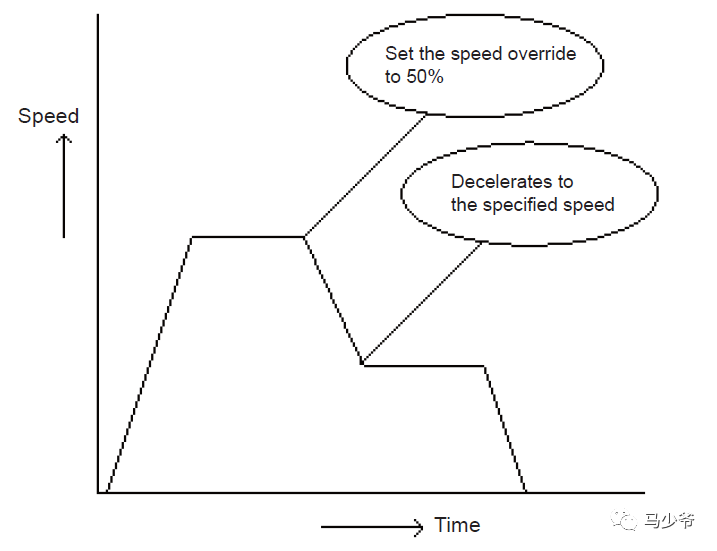
10.3 速度改变功能
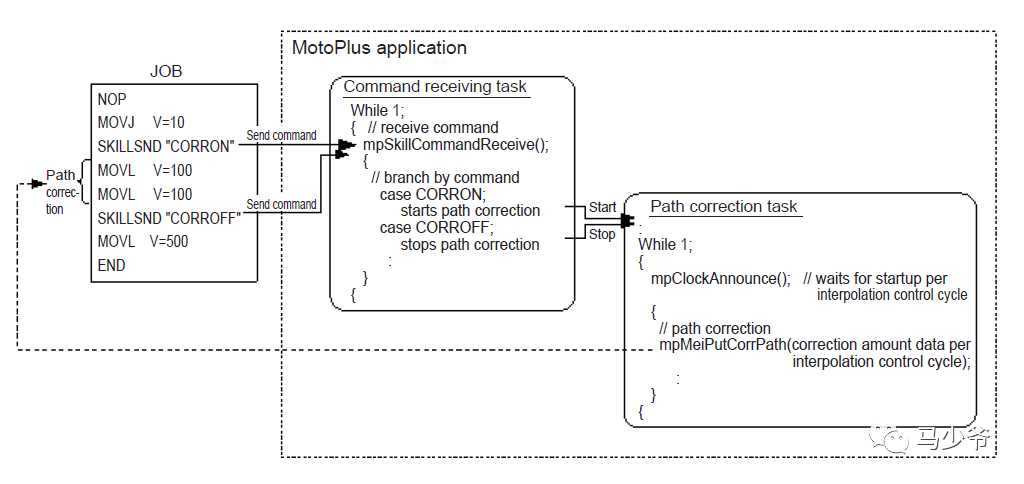
10.4 路径校正步骤
(1)JOB通过SLILLSND发送CORRON命令
(2)Motoplus接收到CORRON指令,请求路径纠偏任务开始校正
(3)路径纠偏任务开启无限循环
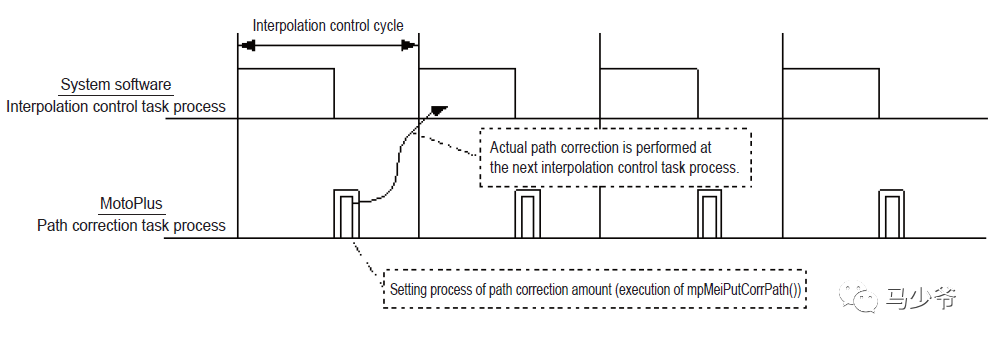
使用mpMeiPutPath给出纠偏量,通过mpClockAnnounce()与系统插值控制周期同步
(4)在命令CORRON和CORROFF之间执行MOVL,Motoplus给出对原始示教路径的路径校正量。
(5)JOB通过SLILLSND发送CORROFF命令
(6)MotoPlus接收到CORROFF,停止纠偏任务。
10.5 路径校正的时间流程
API
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3194
3194











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









