






6
第六章 移动实时三维测量系统开发
6.2 运动补偿算法分析及应用不同于本文之前所述的静态三维测量系统,对于移动三维测量系统中同步误差补偿,可以通过两种不同方式进行分析和比较。一种是利用第四章中提到的质心跟踪方法,另一种是根据机器人实时反馈运动信息。对于静止的三维测量系统,同步误差的产生是由于物体本身的运动造成的;由第四章中分析可知,满足物体为刚体和匀速运动假设时,基于质心的跟踪算法可以用于物体运动信息的估计。当三维测量模块在距离测量平面一定高度时,其在二维平面的运动也会导致同步误差的产生,此时对于同步误差的补偿既可以采用估计出的物体运动速度信息,也可以利用机器人实时反馈信息。
6.2.1质心跟踪法运动估计
质心跟踪法运动估计适用于刚体在二维平面内的匀速运动。对于非匀速运动物体,假设其运动速度在结构光图像投影的16ms时间内接近于匀速。由第四章中质心跟踪迭代过程可知,仅当物体全部处于相机视场范围内时,质心跟踪算法才能对物体运动速度进行估计。在物体进入视场和离开视场过程中(即物体有一部分不在视场中),不满足刚体假设,物体质心的变化会非常不稳定,此时利用质心变化估计运动速度会出现较大偏差。本文称这种进入和离开相机视场的过程为临界过程,在利用运动补偿算法过程中,不对临界过程中的三维测量做任何处理,即等同于“GC1K”方法。此外,物体质心跟踪算法还存在一个问题,即速度估计需要一个过程才能接近于物体实际运动速度;过程时间的长短取决于物体的速度和加速度信息。因此,在“MCGC1K”方法测量结果中,只有当估计的物体运动速度趋于稳定时才能获得准确的三维形态测量结果。
6.2.2机器人运动信息反馈
如图6.2所示为机器人实时控制与运动参数反馈示意图,该机器人与计算机之间采用以太网通信,双向通信(发送指令与参数反馈)时间可以达到7.1ms,可以实时地获取机器人各关节运动参数信息,用于相机坐标系运动速度估计。图像平面内物体运动速度可以通过机器人实时反馈的运动信息与测量系统参数确定。相比于质心跟踪法的运动估计,基于机器人运动信息反馈方法具有以下优点:
(a)
反馈及时基于质心跟踪的运动物体速度计算每16ms更新一次,用于下一次三维测量运动补偿算法中,具有较大的时间延迟。然而,本章采用的六自由度机器人运动参数反馈时间为7.1ms,反馈参数能够更加及时地应用到运动补偿算法中。
(b)
反馈值更加准确当机械臂带动三维测量模块以一定速度扫过测量平面时,在任何时刻均能获得准确的测量模块与被测物体之间的相对运动信息,即反馈信息。即使物体处于临界运动区域时也可以利用此刻的运动速度进行运动补偿。
(c)
效率高利用机械臂反馈运动信息进行帧间像素偏差补偿,不需要进行复杂的运动速度计算过程,会进一步降低算法执行时间,提高算法效率。
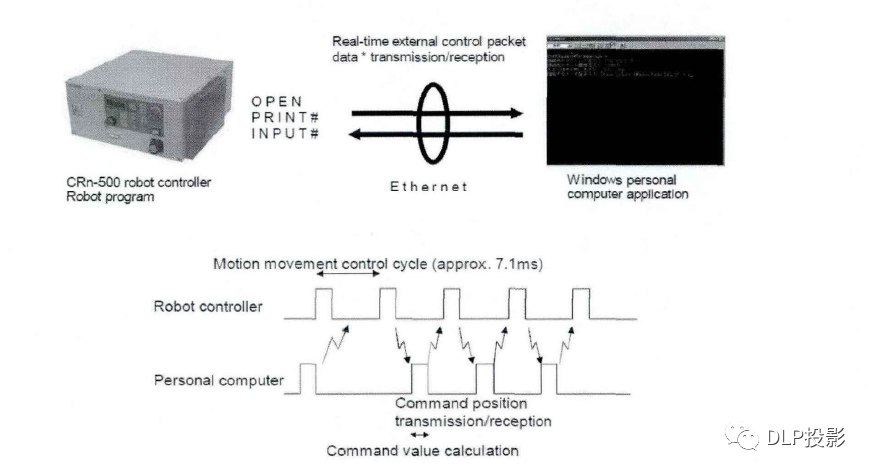
图6.2机器人运动参数反馈
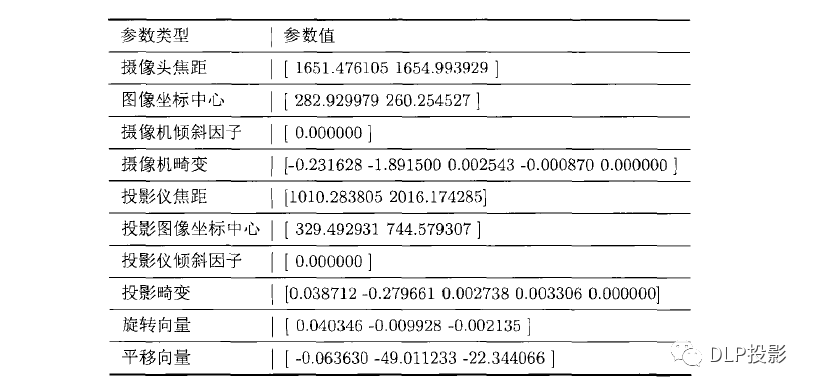
表6.1三维测量系统标定参数
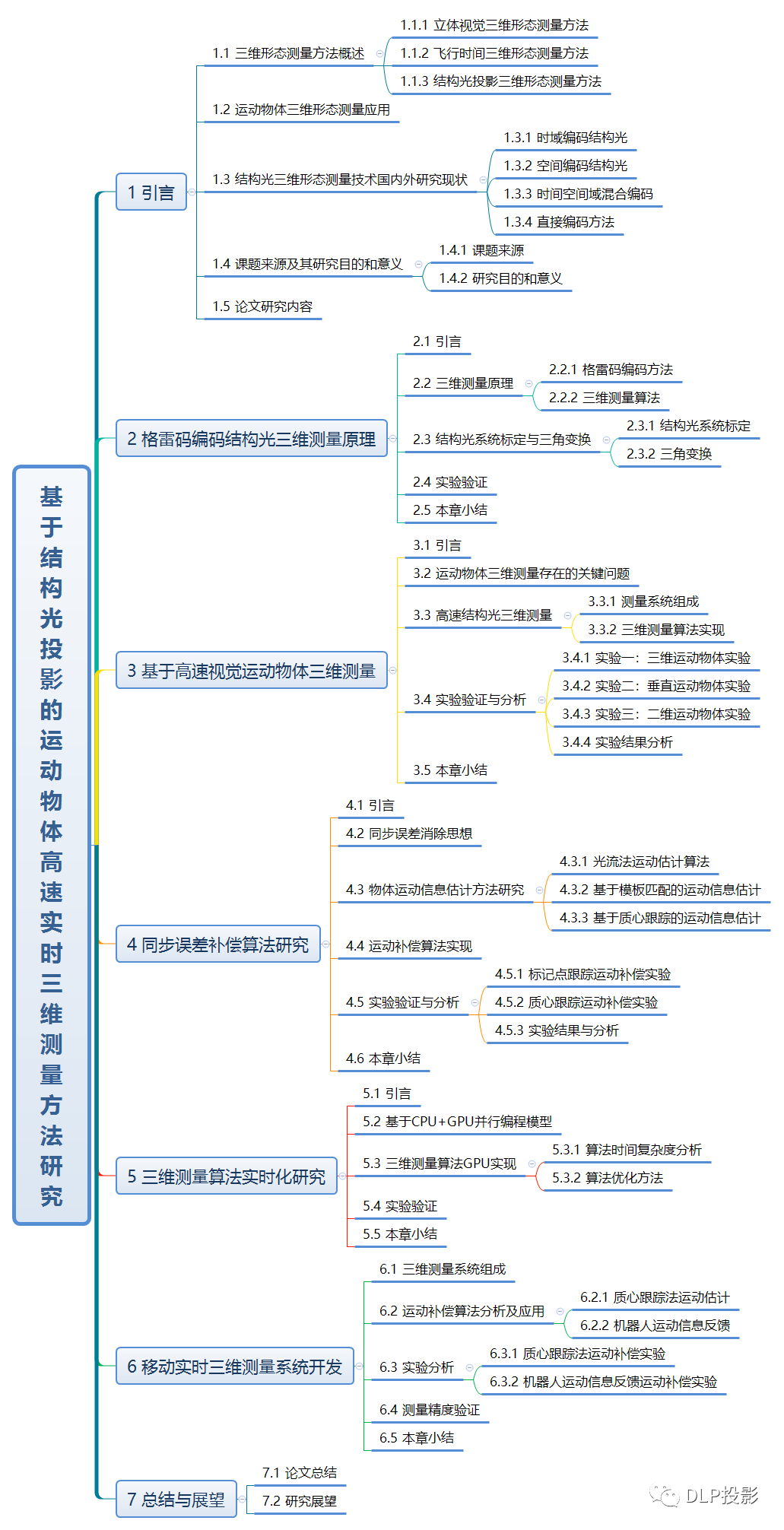
 文章大纲
文章大纲
更多问题,可以扫码加微信咨询。
添加时务必备注”称呼+单位信息+DLP公众号“,否则不予通过。

本人微信

机器视觉交流群
 历史推送
历史推送
- 【连载预告】基于结构光投影的运动物体局速实时三维测量方法研究
【连载1.1】三维形态测量方法概述
【连载1.2】运动物体三维形态测量应用
【连载1.3.1】时间编码结构光
- 【连载1.3.2】空间编码结构光
- 【连载1.3.3-1.3.4】时间空间混合编码&直接编码
- 【连载1.4-1.5】课题来源及研究意义&主要内容
- 【连载2.1-2.2】三维测量原理
- 【连载2.3.1】结构光系统标定
- 【连载2.3.2】三角变换
- 【连载2.4-2.5】实验验证及小结
- 【连载3.1-3.2】运动物体三维测量存在的关键问题
- 【连载3.3】高速结构光3D测量
- 【连载3.4-3.5】实验验证与分析& 本章小结
- 【连载4.4-4.6】运动补偿算法&实验验证与分析&本章小结
- 【连载5.1-5.2】引言&基于CPU+GPU并行编程模型
- 【连载5.3】三维测量算法GPU实现
- 【连载5.4~5.5】实验验证&本章小结
- 【连载6.1】移动实时三维测量系统开发
行业报告
【行业报告】机器视觉:从可选向必选迈进
【行业报告】抖音上的80、90、00
科普
【科普】中国达芬奇手术机器人临床应用
- 【科普】达芬奇手术机器人系统介绍及应用进展
- 【科普】3D视觉技术在机器人抓取作业中的应用
- 【科普】采用菱形排列DMD的格雷码三维重建
- 【科普】6种3D光学传感技术概述
- 【科普】散斑结构光三维传感技术的典型应用
- 【科普】3D光学传感器的前世今生
- 【深度科普】贵得有底气!一文搞懂投影机镜头
- 3D 打印口腔领域应用盘点
- 基于机器视觉的水果品质检测综述
一个视频看懂DLP技术[DMD]
作者姓名:刘永久
学科专业:信息获取与控制
导师姓名:双丰研究员 石井抱教授
本文为转载内容,如有侵权,请通知删除。 转一转
转一转
 赞一赞
赞一赞
 看一看
看一看














 6252
6252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









