





写在前面:自己学习PID时,根据网上文章总结的知识,最终用python模拟的调参环境,内容 分三部分,一,水箱环境,二,代码展示,三,模拟运行。(不直接介绍PID原理,代码注释有一点点PID原理)
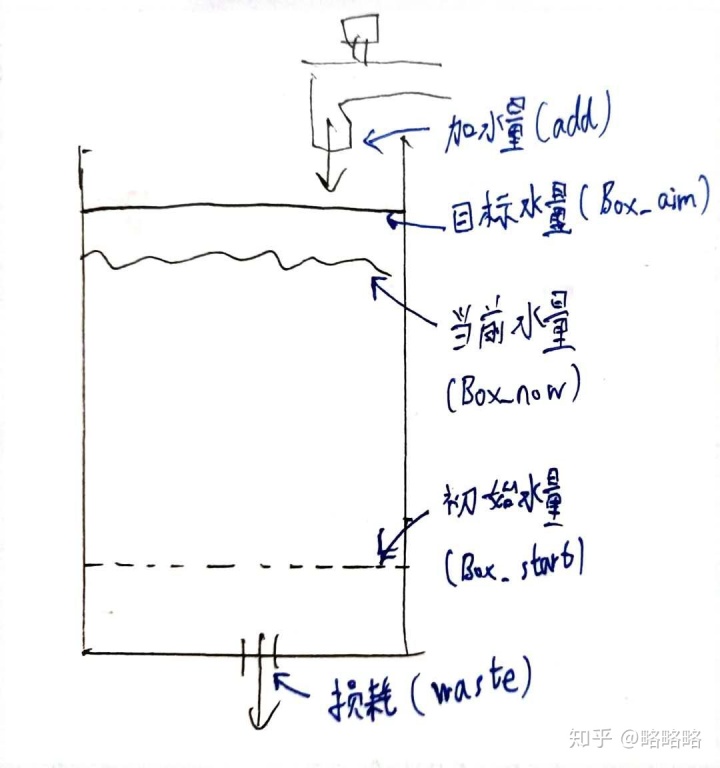
一,水箱环境
二,代码
代码功能,可以自行调节参数,然后运行生成响应曲线
# -*- coding: utf-8 -*-
三,运行示例
#图3-1
Kp = 0.9
Ki = 0
Kd = 0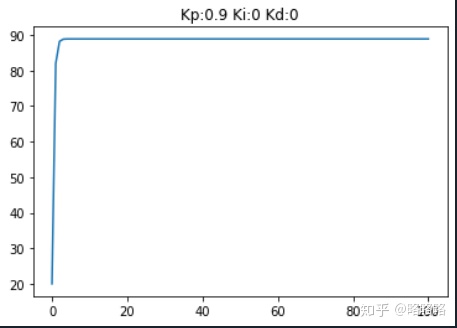
#图3-2
Kp = 0.9
Ki = 0.5
Kd = 0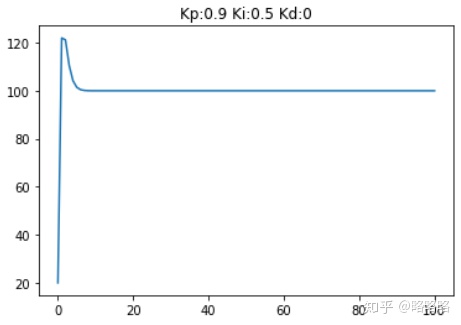
#图3-3-1
Kp = 0.4
Ki = 0
Kd = 0
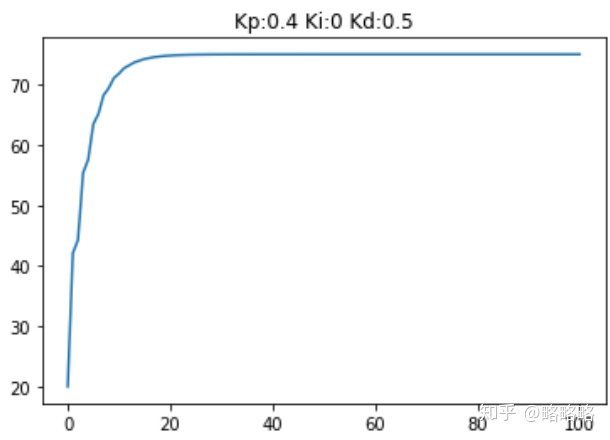
#图3-3-2
Kp = 0.4
Ki = 0
Kd = 0。5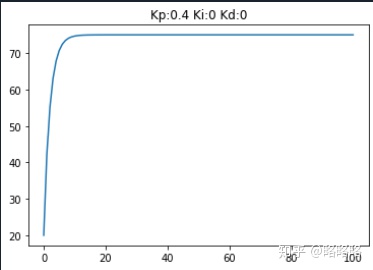
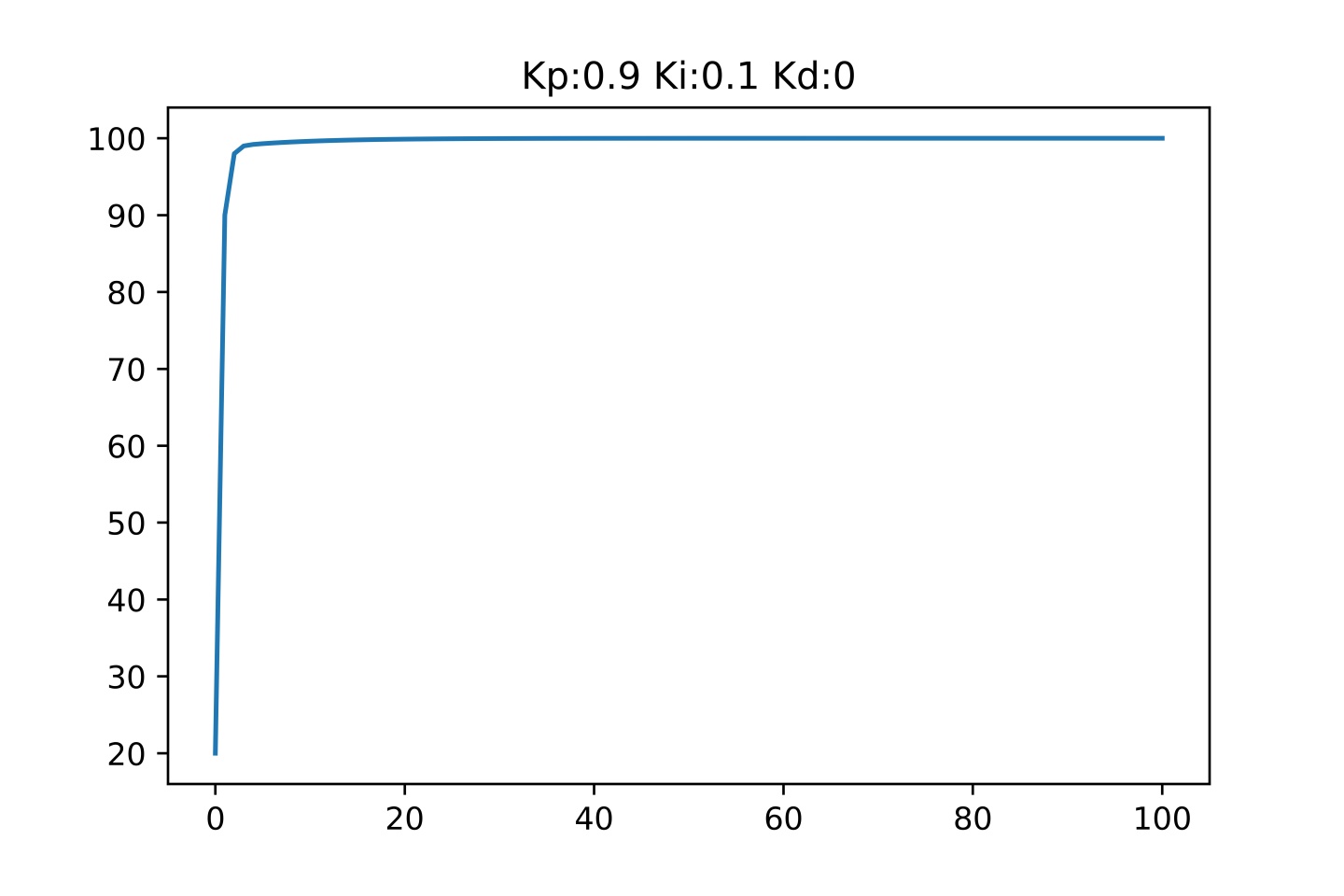
#图3-4
Kp = 0.9
Ki = 0.1
Kd = 0.1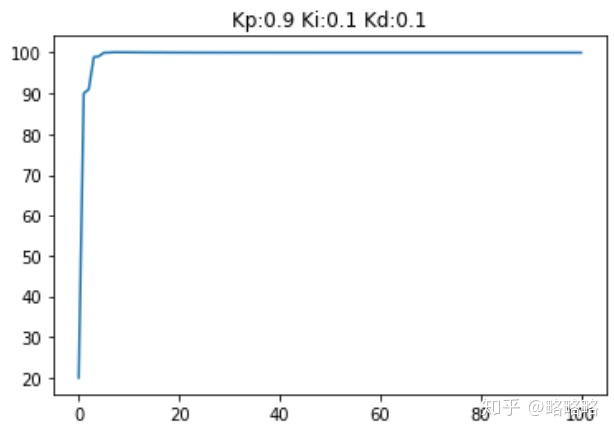















 438
438











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









