







 文章详细介绍了PID参数整定的各种方法,包括临界比例度法(Ziegle-Nichols),阶跃响应曲线法(Z-N和C-C法),IMC-PID内模控制整定,以及P-V法。对于不同类型的系统,如一阶、二阶、高阶带滞后系统,文章提供了适用方法的比较和仿真调参结果,强调了系统特性和参数选择的重要性。
文章详细介绍了PID参数整定的各种方法,包括临界比例度法(Ziegle-Nichols),阶跃响应曲线法(Z-N和C-C法),IMC-PID内模控制整定,以及P-V法。对于不同类型的系统,如一阶、二阶、高阶带滞后系统,文章提供了适用方法的比较和仿真调参结果,强调了系统特性和参数选择的重要性。
临界比例度法 (Ziegle-Nichols算法 齐格勒尼科尔斯整定方法)
⭐⭐几种整定方法总结(含参数计算代码)⭐⭐
-
临界振荡调参法是不好用的,很难调到所需的位置;
-
对于一阶延时系统(弧型阶跃响应),几种方案优先级:P-V法 > IMC法 > 阶跃响应C-C/Z-N法(会出现明显振荡)
-
对于一阶无延时系统,可以构造一个d,使用上述方法,其中 阶跃响应C-C/Z-N法最优
-
对于二阶延时系统,时间常数大、时滞比大时使用IMC法优于等效阶跃响应法(更快,超调相似,简便)
-
对于更高阶的系统(S型阶跃响应)使用等效阶跃响应法(用一阶延时模拟,再查表选取Z-N/C-C法)可以实现控制
(斜率最大点作切线,以切点的横坐标作为时滞d,切点与后点的时间间隔为时间常数 )
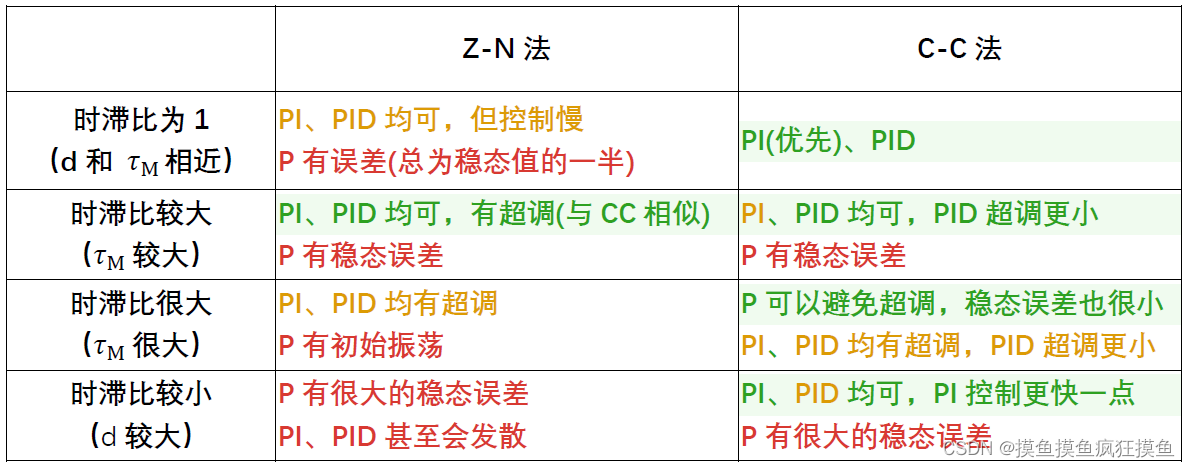
适用性(选择优先级从高到低分别为:绿色 > 黄色 > 红色):
代码整合:
%%系统已知 或已经被等效过(高阶时滞(等效)阶跃响应曲线法
%%---------------------一阶时滞 优先选择P-V法-灵敏度峰值1.4 PI控制-----------------------------------------
%%---------------------开环阶跃响应图像参数
d = ;tau = ;Kss = ;%%注意simulink中控制器要选用理想型(不用并行)
%%---------------------P-V PI控制 灵敏度峰值为1.4
K1_pv=(0.2958*(d/(d+tau))^(-1.014)-0.2021)/Kss;I1_pv=1/tau/(1.624*(d/tau)^0.2269-0.5556);
K=K1_pv
I=I1_pv
%%---------------------二阶时滞 时滞比大(tau大)时 IMC法 快速性更好--------------------------------
%%---------------------开环阶跃响应图像参数
d = ;Kss = ;epsi = ;tau1 = ;tau2 = ;%%注意simulink中控制器要选用理想型(不用并行) 一般可取epsi=0
K2_imc=tau1/Kss/(epsi+d);I2_imc=1/min(tau1,4*(epsi+d));D2_imc=tau2;
K=K2_imc
I=I2_imc
D=D2_imc
%%--------------------一阶无时滞时 阶跃响应曲线法-------------------------------
%%系统未知,需要等效
%%---------------Z-N法/C-C法 具体用哪种可以查表-------------------------------
%%---------------------开环阶跃响应图像的参数--------------------------
d = ;tau = ;Kss = ;%%d是滞后时间、tau为时间常数
%%---------------------注意simulink中控制器要选用理想型(不用并行)
%%---------------------Z-N法-----------------------------------------------------
K1_zn=tau/Kss/d;
K2_zn=tau/Kss/d*0.9;I2_zn=1/3/d;
K3_zn=tau/Kss/d*1.2;I3_zn=1/2/d;D3_zn=0.5*d;
%%---------------------Cohen-Coon法-----------------------------------------------
K1_cc=tau/Kss/d*(1+d/3/tau);
K2_cc=tau/Kss/d*(0.9+d/12/tau);I2_cc=1/(d*(20*tau+3*d)/(9*tau+20*d));
K3_cc=tau/Kss/d*(4/3+d/4/tau);I3_cc=1/(d*(32*tau+6*d)/(13*tau+8*d));D3_cc=4*d*tau/(11*tau+2*d);基本都需要依靠系统的阶跃响应曲线、读取时滞等参数、进行PID参数整定。
下文中详细介绍各种方法的适用条件、原理、优缺点以及实际仿真结果。
PID 参数整定方法
临界比例度法 (Ziegle-Nichols算法 齐格勒尼科尔斯整定方法)
是用纯比例控制器,将系统放入闭环(单位负反馈回路)中进行整定 ---> 闭环
PID控制及整定算法_pid自整定_挥剑踏苍穹的博客-CSDN博客
一文弄懂调节器的PID自整定原理和方法_正弦信号pid调节-CSDN博客
适用条件
适用于临界振幅小、振动周期长的过程控制系统
主要参考:PID控制算法与参数整定,用这几招轻松搞定!_strongerHuang的博客-CSDN博客
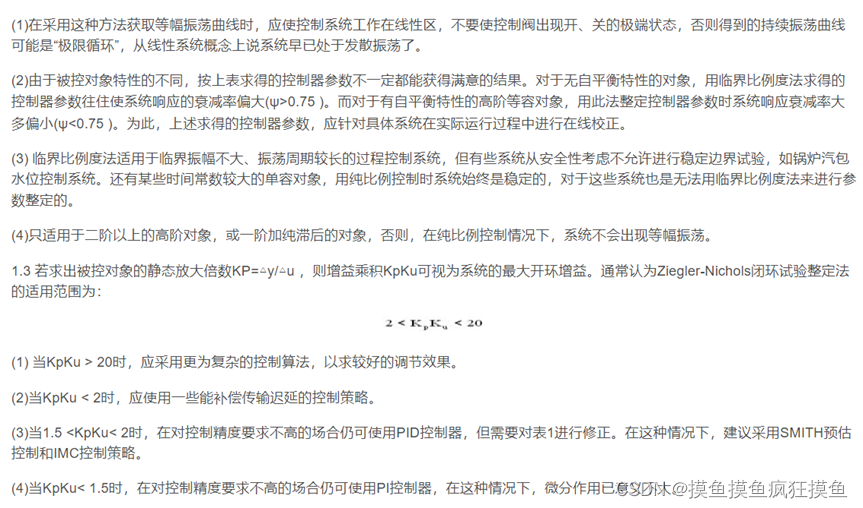
适用于阶跃响应曲线是个S型 临界振幅不大、振荡周期较长的过程控制系统
不适用于一阶(除了一阶加纯滞后),适用于二阶以上,但不能有稳定零点(负平面零点);
一阶不适用:要出现等幅振荡,即在高斯判稳时出现整行0,或者说有一对纯虚根;而对于一阶系统,特征根不可能成对;
对于一阶滞后系统,可以对其阶跃响应进行推导:
; 拉反得响应
但这个好像不会...
仿真发现,当闭环阶跃响应为 ,当
时,总会出现等幅振荡
如当T为1时,,对于
出现等幅振荡,拉反应该与三角函数相关(或者可能与周期性拉氏变换有关?周期信号的拉氏变换.ppt)
滞后环节的滞后时间n与一阶系统时间常数T的关系:;如果没有滞后环节,系统闭环阶跃响应应为
对于二阶系统阶跃响应,特征根为共轭虚根,就是阻尼比为0;关于二阶系统的阶跃响应分析:二阶系统的时域响应及动态性能(时域分析)_二阶系统响应_wanrenqi的博客-CSDN博客 关于频域Bode图分析:第十一讲 频域分析法(伯德图) 时域分析: 自控原理-线性系统时域分析_pd反馈控制_M12-ll,的博客-CSDN博客
主要原理
可以参考:使用Ziegler-Nichols方法的自整定控制 但不是很明白
其实主要是微分常数与P(稳定振荡周期)的正相关性:微分常数越大,快速性越好,而对于稳定振荡时过程量变化缓慢的系统(P比较大),应该使用较为灵敏的控制,在产生变化时立即控制住;而对于P较小的灵敏系统,保守控制;
PID控制器类型的选择
控制规律的选择
P: 适用于干扰变化幅度小,自衡能力强,对象滞后(τ∕T )较小,控制质量要求不高,且系统允许有一定范围余差的场合。
PI: 工艺要求静态无余差,控制对象容量滞后很小,负荷变化幅度较大,但变化过程又较缓慢的场合。
PD: 适用于控制对象T0较大的场合。对于滞后很小,信号有噪声或周期性干扰的系统不能采用微分作用。
PID: 适用于负荷变化和对象容量滞后都较大、时滞不太大且控制质量要求又较高,被控变量变化缓慢的场合。
PID控制器各个环节作用参考:PID参数整定一些总结_呆萌蜗牛的博客-CSDN博客
| 增大量 | 安定时间 | 滞后时间d | 时间常数 |
| Kp | 稍增 | 增加 | 减少 |
| Ki | 增加 | 增加 | 稍减 |
| Kd | 减少 | 稍减 | 稍减 |
开环阶跃响应曲线整定 (有Z-N和C-C两套经验公式)
适用于系统传函未知,形式为开环,给予阶跃激励,记录输出,属离线方法;
上表分析Kp的整定公式是合理的
在低频段(与稳定性相关),主要是PI控制规律起作用,提高系统型别,消除或减少稳态误差;
在中高频段(与快速性相关)主要是PD规律起作用,增大截止频率和相角裕度,提高响应速度;
基于 Z-N 法
主要参考:基于齐格勒-尼科尔斯法则(Ziegler–Nichols
基于Ziegler-Nichols法的PID参数整定_我要积分我要积分的博客-CSDN博客(给出了Z-N的改进法)
PID参数 Ziegler-Nichols基于时域响应曲线的整定 反应曲线法_陈蜜蜂的博客-CSDN博客
这个原理可以猜想一下(没有查到):
在斜率最大处做切线,与稳定值交点对应d为滞后(死区)时间,动态响应时间的测度(对象时间常数$$\tau$$);
阶跃响应曲线的Kss与Kc反比容易理解,而如果时间常数大,即快速性差,也需要通过增大比例常数提高快速性;
积分环节中积分常数越大,积分作用越弱,即动态响应变快,但对应稳态误差较大;
难道说比例常数增大是加快上升,而积分常数增大会使动态响应提前??确实如此
继电器法难道就是这样?给予阶跃信号分析输出的时域响应????
实例:PID整定一:响应曲线法_响应曲线法整定pid参数_lijil168的博客-CSDN博客
PID参数 Ziegler-Nichols基于时域响应曲线的整定 反应曲线法_陈蜜蜂的博客-CSDN博客
基于 Cohen-Coon 科恩-库恩法
与Z-N法相比,校正了缓慢稳态响应情况,即相对于开环时间常数,存在较大的死区时间(过程延迟d)的情况,因此只适用于有时间延迟的一阶模型
-
比例常数Kc:显而易见相当于加入了一项1/3Kss,改进后,当Kss较大时二者相同,Kss较小时,还要再大一点
-
积分常数:当时间常数>>d,仍为3.33d;而d>>时间常数,迫切需要通过增加微分常数来将响应提前;
-
微分常数:相似,当时间常数>>d,仍为0.36d;而d>>时间常数,2,通过增加微分常数来将响应提前;
二者比较
主要参考:2. 通过经典方法进行 PID 调谐_蔚蓝慕的博客-CSDN博客
简单比较:PID控制& Simulink& 标定_simulink超前校正_Jar_Lee的博客-CSDN博客
注意这里都是时域分析,时间常数体现了响应的快慢,而滞后时间,则需要考虑使用微分环节抵消系统本身滞后产生的影响,是因为系统存在滞后环节
IMC-PID 内模控制整定
计算原理主要参考:基于内模原理的PID控制器参数整定
灵敏度峰值
灵敏度峰值 第二章P46图片/P52 灵敏度幅值 就是用于扰动抑制的整定规则
灵敏度与干扰抑制相关,灵敏度函数反映了扰动对于输出的影响;最大灵敏度Ms越小,系统抗干扰性就越好
灵敏度峰值的计算可以直接通过灵敏度公式求;而在两种整定中,设计了两种目标最大灵敏度,抗扰前提下求参
猜测:由于d放大高频噪声,所以不抗干扰;对于Ms设定值越小,也就是越抗干扰的,d作用要减弱,而快速性也变差,因此P16说产生较慢的闭环响应
但抑制噪声和抑制扰动总是存在矛盾的
是否含有积分环节
而关于含有积分环节的系统 控制器仍采用积分
频域法分析系统详解及个人笔记_51CTO博客_系统的频域分析法
解释一阶系统不能靠增大K产生振荡
⭐整体比较⭐
| 整定方法 | 方法简述 | 本质原理 | 适用场景 | 不适用 | 优点 | 缺点 | |
| 临界比例度法 | Ziegle-Nichols | 闭环/在线调试 纯比例控制器接入到闭环控制系统中,记录等幅振荡(其实书上写的是出现持续振荡)对应的临界增益和临界周期参数,查表得出PID控制器参数; | 从开环阶跃实验中辨识模型相关参数,后通过经验查询表格直接确定PID参数 | 一阶纯滞后系统 二阶及以上系统 临界振幅小、振动周期长的过程控制系统 | 一阶系统 含稳定零点二阶 某些系统时间常数较大的单容对象 (任意比例控制均稳定) 从安全性考虑不允许进行稳定边界试验的系统 | 简直没有发现... | 调参后的响应初期常有较为明显的振荡,较为激进(可以通过减小P/I等参数来修正); 持续振荡难确定; |
| 阶跃响应曲线 | Ziegle-Nichols | 开环/离线调试 记录阶跃响应曲线,在曲线最大斜率(延时拐点)处做切线,求得滞后时间 t,对象时间常数 | 根据被控系统开环传递函数Nyquist曲线与负实轴交点处的增益和频率确定PID参数并将该交点移到指定位置,调整Nyquist曲线形状(环路整形方法) | 有时延的一阶(一阶纯滞后) 被控对象的单位阶跃响应曲线看起来近似一条S形曲线 (广义对象的响应曲线可以用“一阶+纯滞后”来近似) | 破坏性小 | 由于简化模型只适用于特定工作频率下的特定被控对象,导致基于简化模型整定出来的控制器应用范围和性能大大受限,某些条件下甚至会导致系统失稳; | |
| Cohen-Coon | 校正了缓慢稳态 ( | ||||||
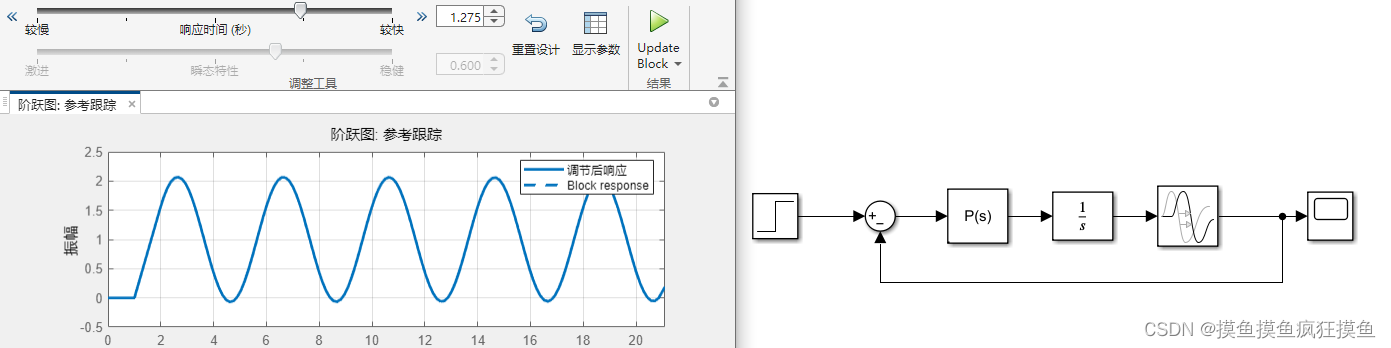
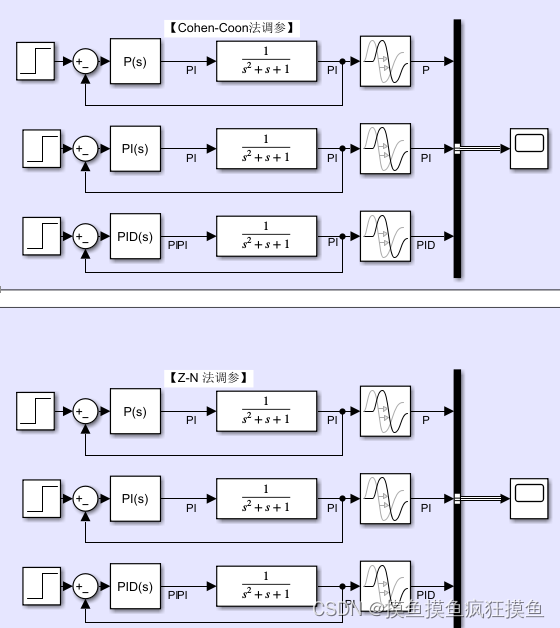
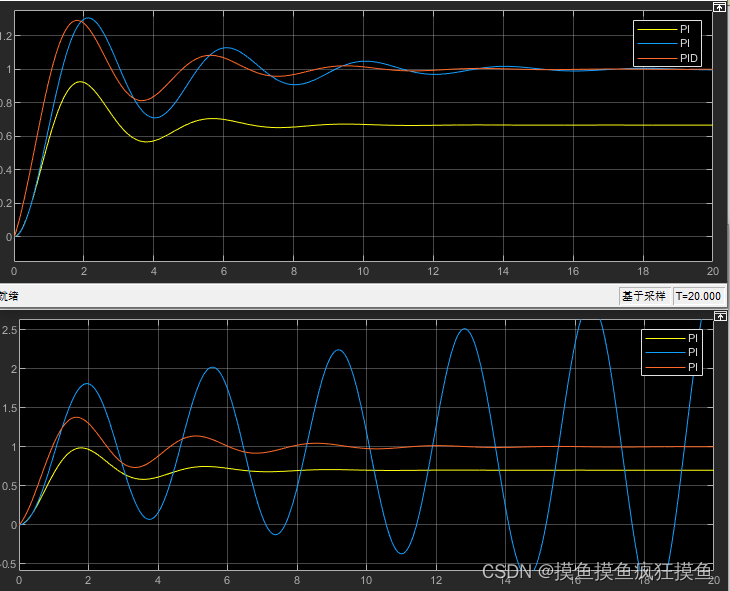
仿真调参【Z-N 临界振荡法】
一阶系统
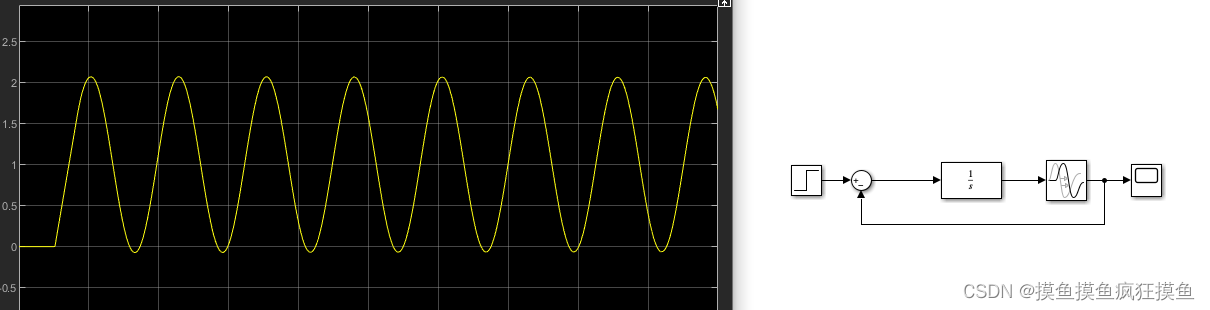
一阶是不适用于临界比例度法的,因为不会产生等幅振荡,可以通过以下阶跃响应的推导证明:
经典一阶,如图P参数为P,对应于闭环系统:
其阶跃响应传函为
拉反得响应信号为
无论P怎么变化,总是会得到上图中的响应曲线;
一阶纯滞后
这个指在闭环中加入纯滞后环节,这里加入延时1,即模块 ,对应传函
推导一下:其阶跃响应传函为
可以参考信号与系统P282,无失真传输:但求不出响应时域解,想过把拉变改为傅变![]()
可以用![]() 但仍然没法求解 或者
但仍然没法求解 或者是周期的标志;
因此考虑使用Taylor展开,将纯滞后环节展开 可以用多阶环节代替:
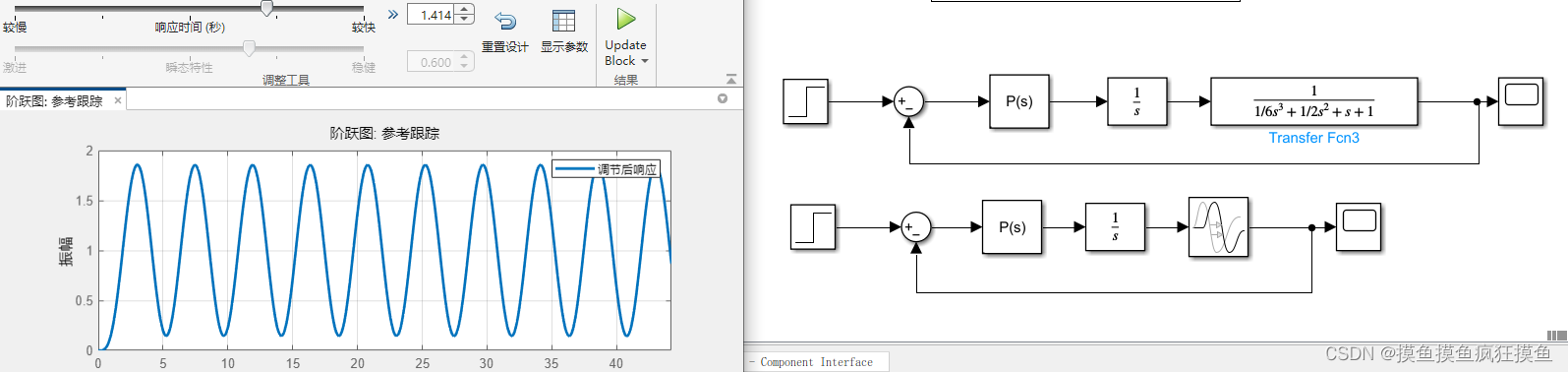
或者直接用一阶惯性环节代替:

其实T越小,用一阶惯性来近似效果越好,但上图仿真和推导发现只可能是欠阻尼的衰减振荡
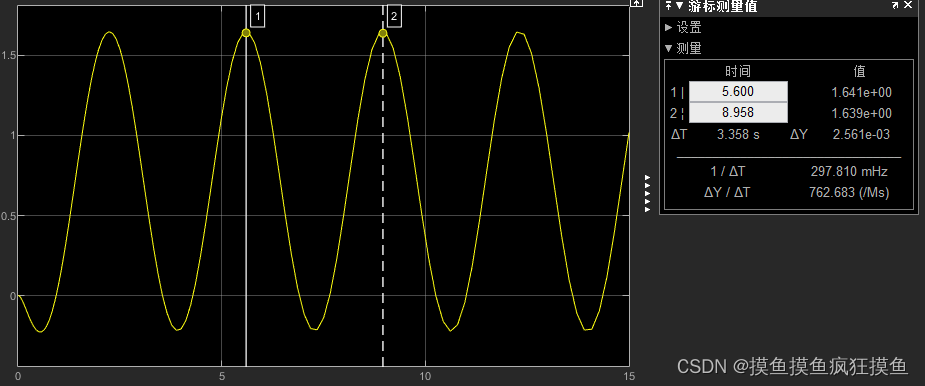
二阶系统
典型二阶系统的传递函数为 ,对其阶跃响应拉反:
拉反得:
将 记作
,将
记作
,就得到了经典的二阶系统通用阶跃时域响应函数:
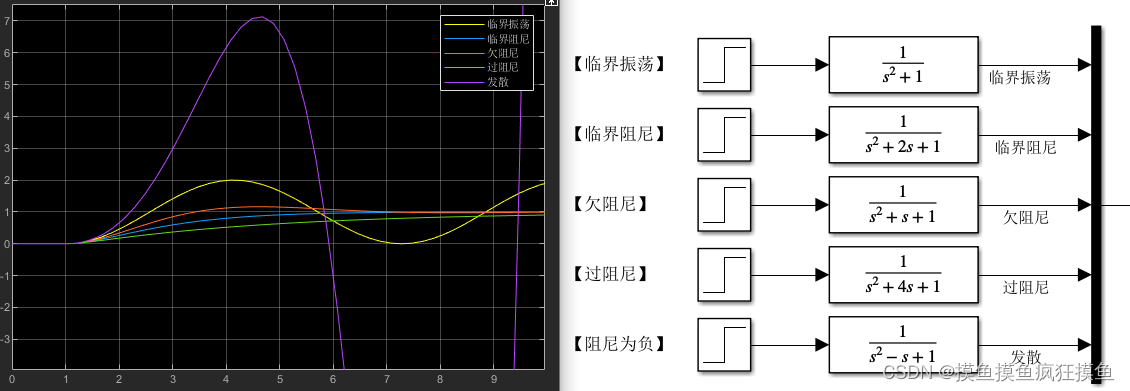
分情况分析:
-
阻尼比
:$$y(t)=1-sin(\omega_n t)$$ 等幅振荡
-
阻尼比
(临界阻尼):
得到:
基本曲线图像:假设固有频率为1,
3. 欠阻尼 :
呈现一种衰减的周期振荡
4. 过阻尼 :印象中这个很复杂又不会出题所以干脆不考虑了 反正是发散
小结
可以通过系统传函的特征方程求出特征根,来判断系统阶跃响应的形式:
如对于二阶系统的特征方程 :
-
如果
,位于虚轴上,系统临界稳定,出现等幅振荡
-
如果
,得到特征根为一对位于右半平面上的共轭复根,系统发散
-
如果
,得到特征根为一对位于左半平面上的共轭复根,系统稳定
-
如果
,位于负半平面,系统稳定
-
如果
,特征根必然是一对位于实轴上的实根,一负一正,系统稳定?
调参
因此在闭环的二阶控制系统中,设开环系统的传函为: ,加入PID控制器的P比例控制:
得到闭环传函为 ,映射为经典二阶传函形式:
高阶系统
K=7.5,P=3.36s
P控制器应选用:![]() 计算出为:3.75
计算出为:3.75
PI控制器选用:![]()
,计算出分别为:3.375 和 0.3571
PID控制器选用:![]()
;
,计算出分别为:4.5、0.56、0.42
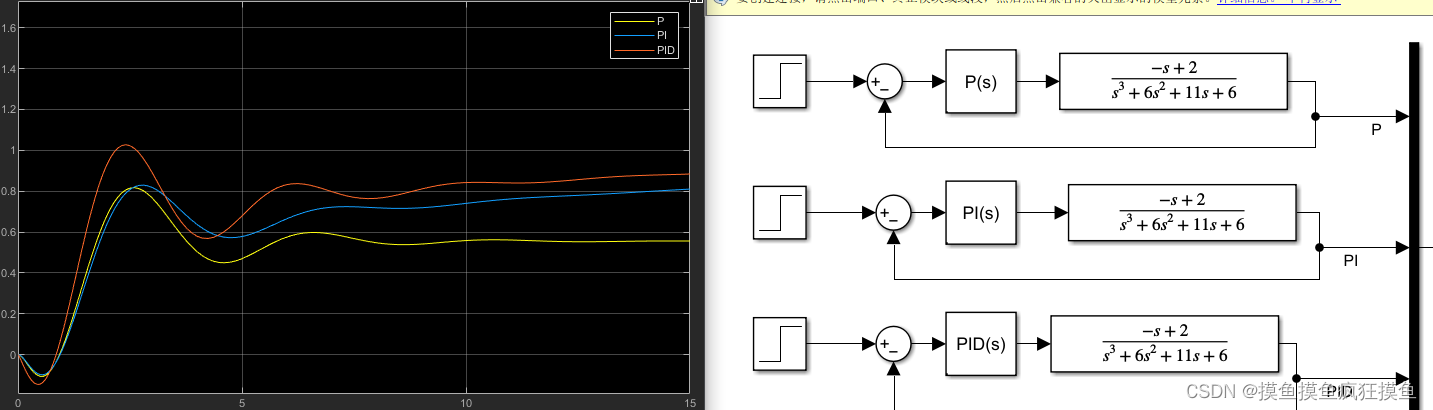
我竟觉得跟上面尝试的结果差不多...都是振荡如此严重...而且在纯用P时会出现比较大的稳态误差;
如果要修正这种不良结果,可以考虑减小K,减小I,即可以选用
![]() ;
; ,计算出分别为:2.3475 和 0.1353
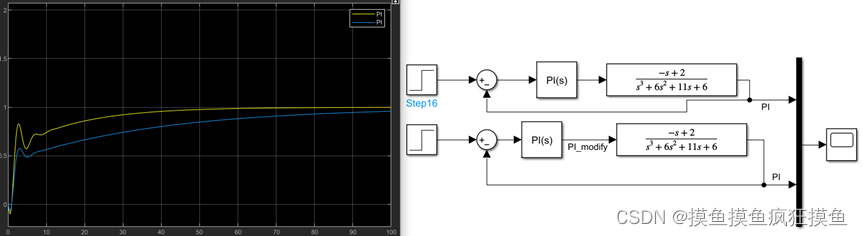
这结果好多了...
而且发现如果时间常数较大,在整定时无论怎么调节K总会产生持续的振荡
而如果有稳定的零点,将会导致无论如何调P,系统总是稳定、没有振荡的,连一点超调都没有
P越大,超调越小 (内环控制允许超调????)
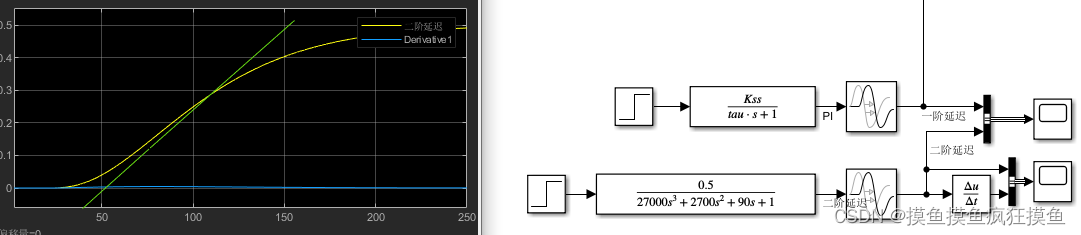
仿真调参【阶跃响应曲线法】
典型一阶延迟模型:
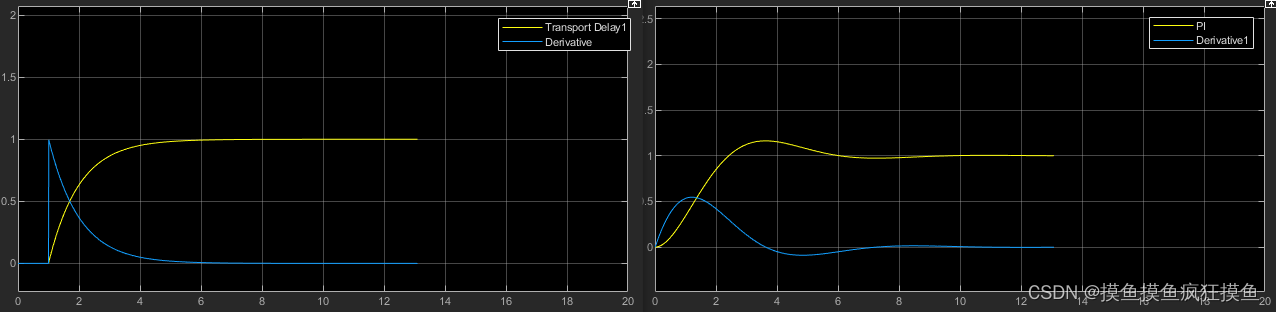
选取 开环阶跃响应:
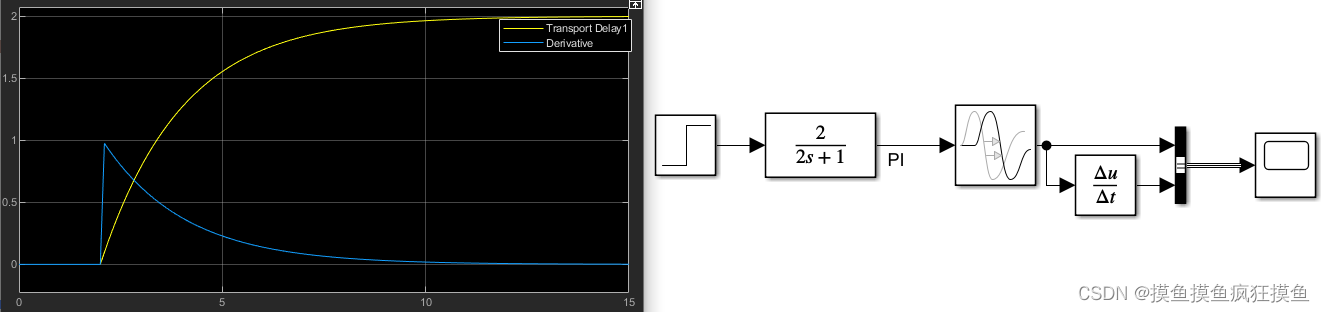
通过响应中 斜率可以通过对原图像求导得到是1,画图可得2
能和设计的系统得到验证,以此确定PID参数:
Z-N 阶跃响应调参查表
;
(注意在simulink中的参数I是这里的倒数,并乘以参数Kc,或者选择用理想型的代替并行的)
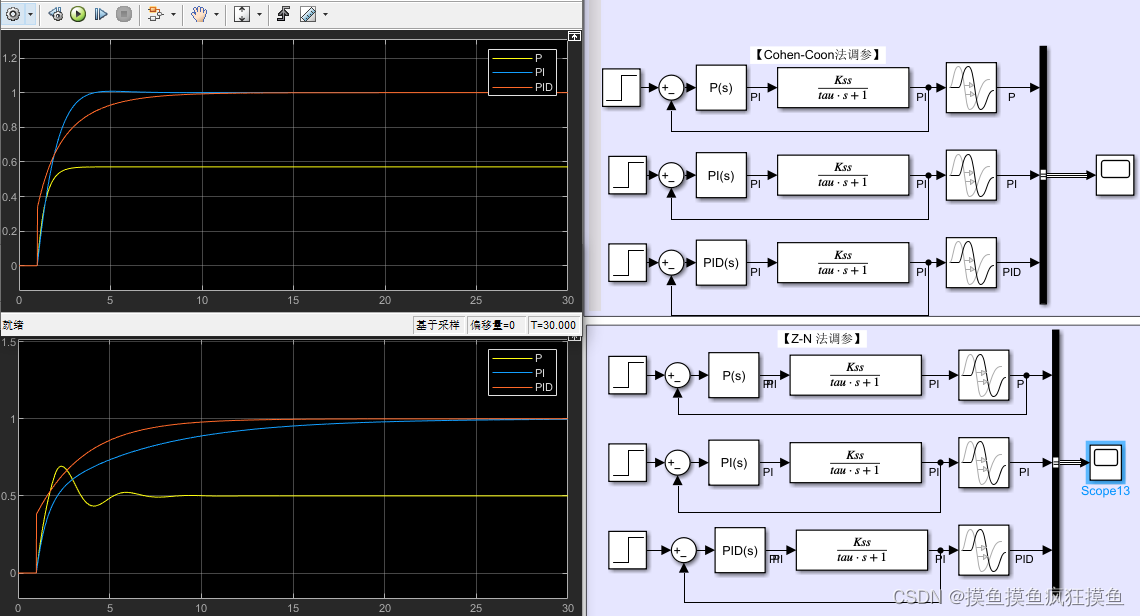
C-C 阶跃响应调参查表
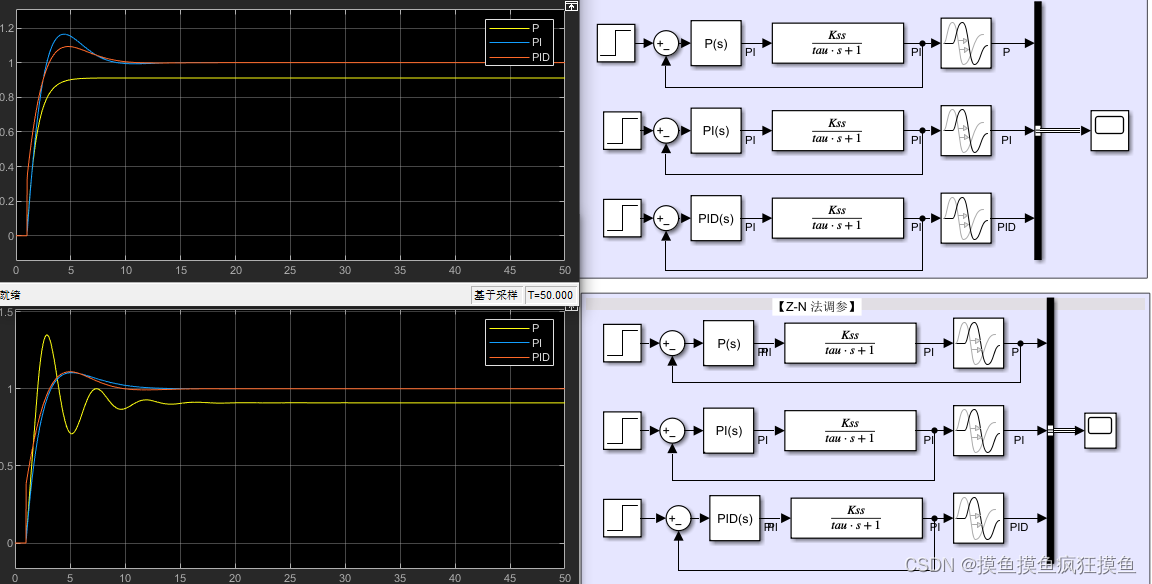
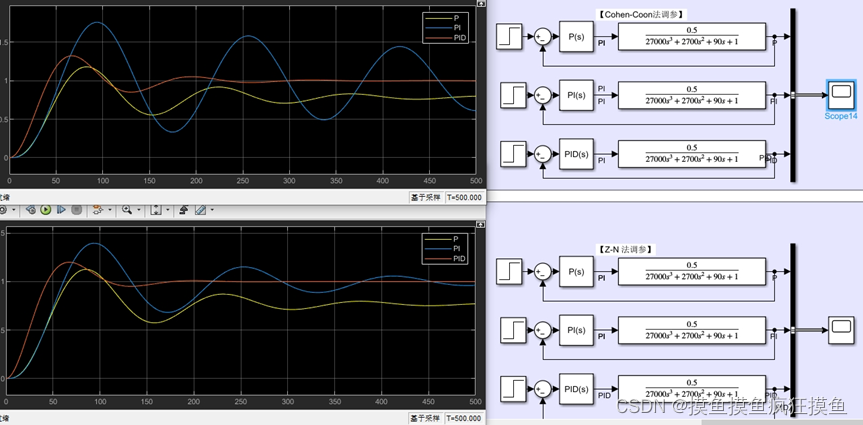
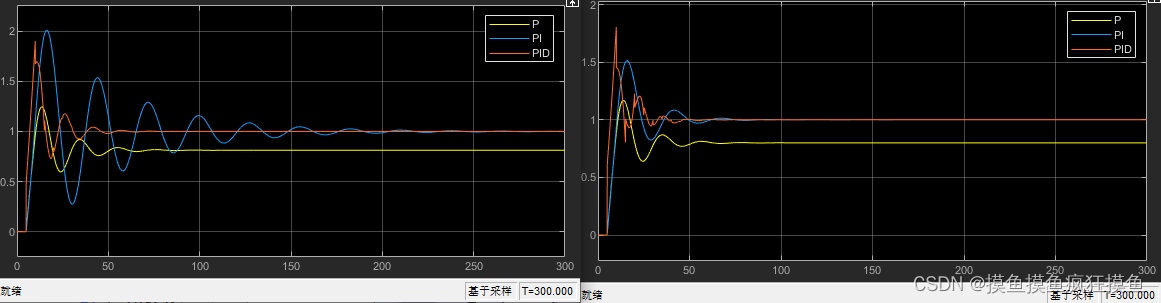
仿真(CC/ZN对比)
选取较小的时间常数与滞后时间
![]() 显然此时:
显然此时:
- 整体上,C-C法在稳定性和快速性方面都更好;
- 但纯比例控制下,两种方法都有稳态误差(这点其实很难,有没有延时模块都会存在误差)
可以用公式推导一下:
不考虑滞后,纯比例控制下的阶跃响应传函为 ,最终误差项
只有使劲增大比例系数P才能使误差减小,尝试将这里的![]() 从0.5调整到10和100:
从0.5调整到10和100:
|
|
|
但一旦加上延时模块,使用大比例系数很可能导致系统的发散
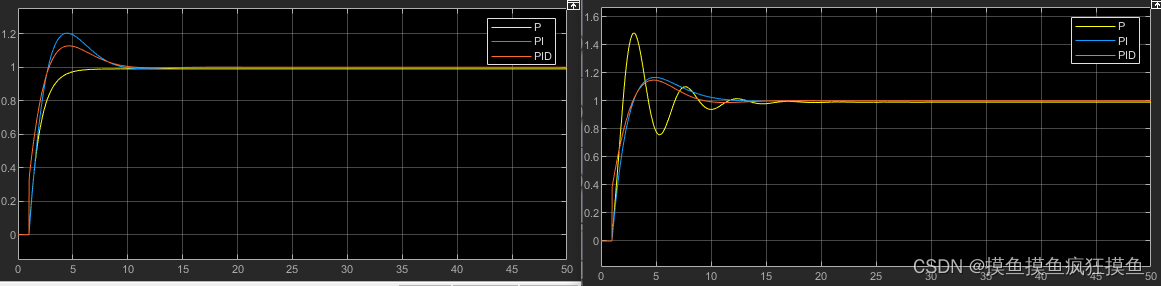
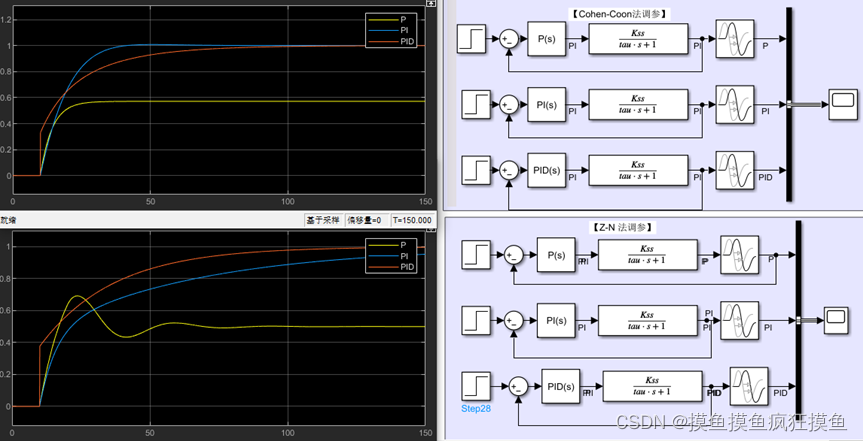
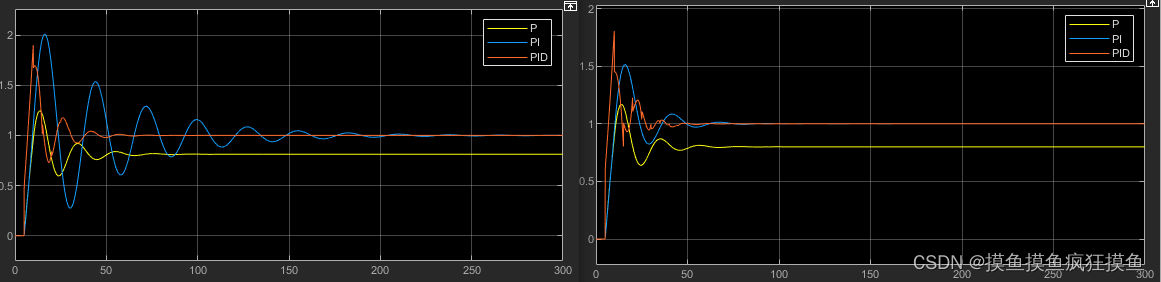
当选用大时间常数(tau/d比较大)
![]() 显然此时:
显然此时:
如果纯比例控制: Cohen-Coon调参无超调,但两种方法都存在稳态误差(但时间常数大、P大,误差较小);
- 如果使用PID控制:两种方法的PI/PID控制效果相似,两种方法都不会有误差;
因此如果时间常数与d时滞的比值很大时,用纯比例控制才不会有很大的误差,而用C-C法能避免超调
尝试用了下比值为100的:
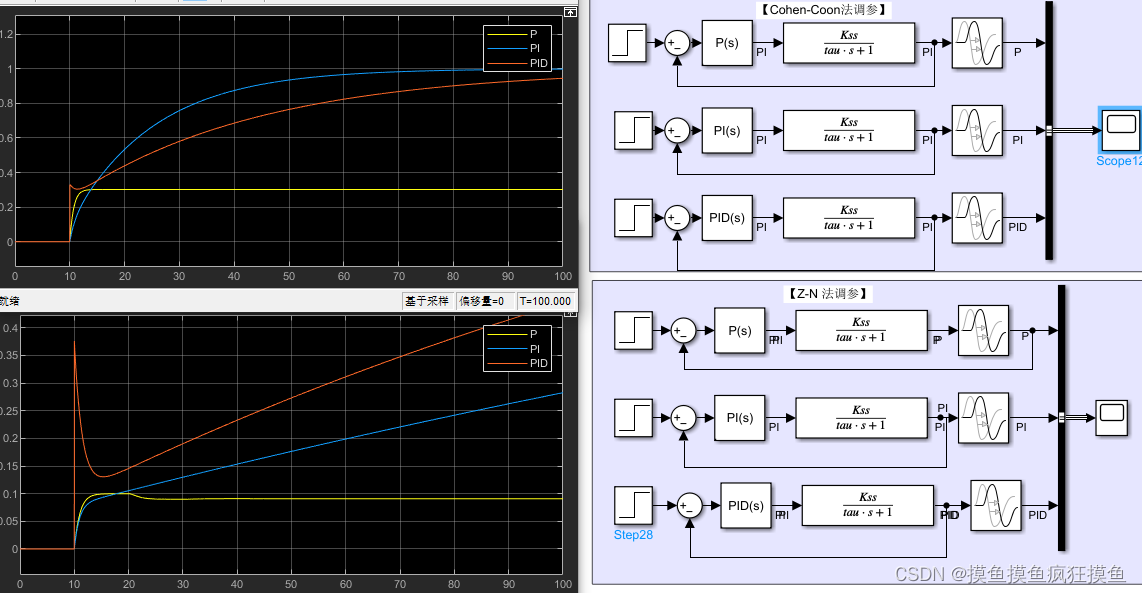
当选用大延时时间(tau/d比较小)
![]() ,根据上面的分析,纯比例肯定会误差很大,但很离谱的是ZN法直接发散了
,根据上面的分析,纯比例肯定会误差很大,但很离谱的是ZN法直接发散了
C-C控制很慢,但毕竟控制住了
如果比值 过小时,用Z-N法调参甚至会使系统发散(而
较小会导致纯比例控制误差更大、CC控制变慢)
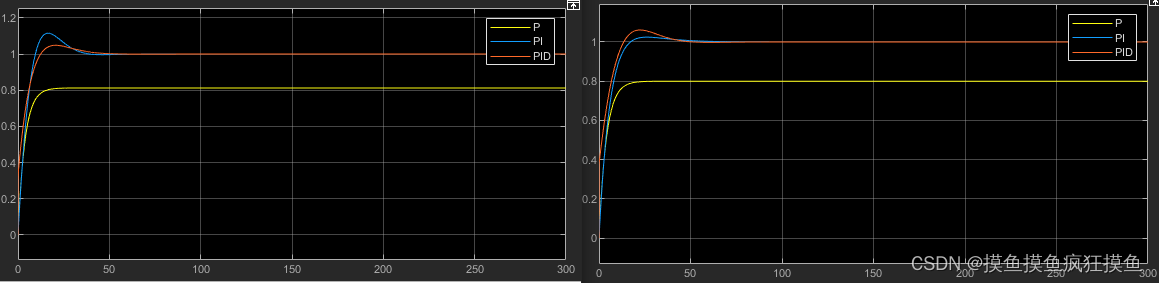
当选用较大的时间常数与滞后时间
τM=10,Kss=2,d=10![]() 并没有发散,不过Z-N的控制速度更慢了
并没有发散,不过Z-N的控制速度更慢了
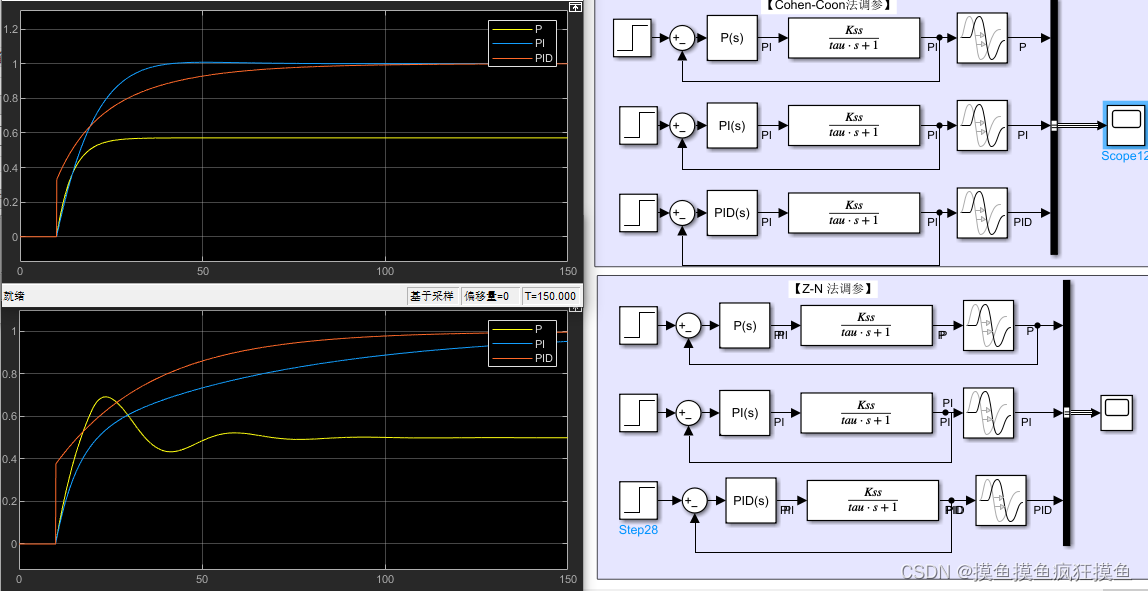
此时如果把Kss也增加到10,两种方法的仿真图像基本未变:
参数Kss的变化对几种控制都不会有影响
⭐仿真结论分析⭐
重点关注图像中的 比值(简记为时滞比),无需关注
![]() :
:
- 除非时滞比很大时可用,否则使用纯比例控制都会有大稳态误差,且Z-N法的纯比例总有超调(初始振荡)
- 当时滞比较大时,两种调参方法控制效果相似
- 当时滞比较小时,用Z-N法调参甚至会使系统发散,纯比例控制误差非常大;C-C的PI/PID可以控制 (但较慢)
- 当时滞比约为1时,使用两种方法的PI/PID均可,但C-C法控制快 (且PI更快) d或tau较大时可选C-C
简而言之,任何时候用 C-C 的 PI 或者 PID 都没错
⭐阶跃响应法参数计算代码⭐
参数算起来有点麻烦,要不写成代码吧:
%%---------------------开环阶跃响应图像的参数--------------------------
d = ;tau = ;Kss = ;%%d是滞后时间、tau为时间常数
%%---------------------注意simulink中控制器要选用理想型(不用并行)
%%---------------------Z-N法-----------------------------------------------------
K1_zn=tau/Kss/d;
K2_zn=tau/Kss/d*0.9;I2_zn=1/3/d;
K3_zn=tau/Kss/d*1.2;I3_zn=1/2/d;D3_zn=0.5*d;
%%---------------------Cohen-Coon法-----------------------------------------------
K1_cc=tau/Kss/d*(1+d/3/tau);
K2_cc=tau/Kss/d*(0.9+d/12/tau);I2_cc=1/(d*(20*tau+3*d)/(9*tau+20*d));
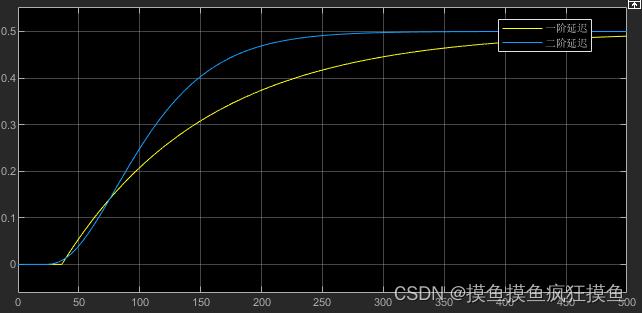
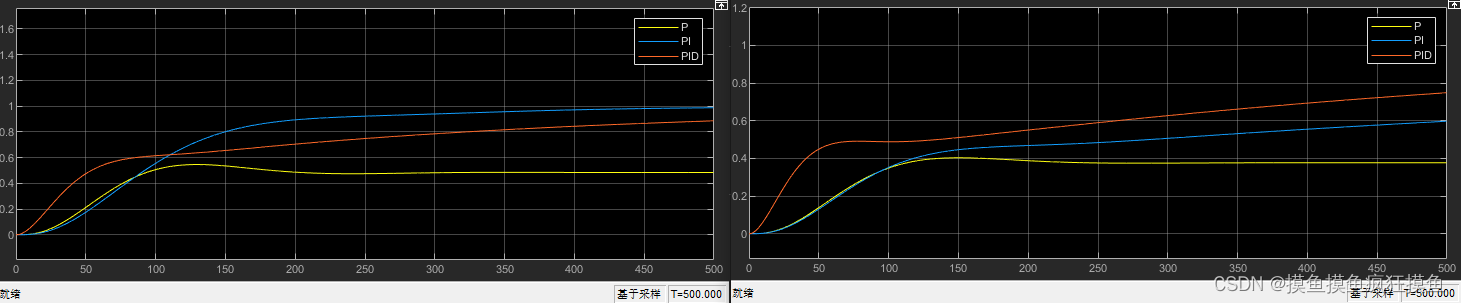
K3_cc=tau/Kss/d*(4/3+d/4/tau);I3_cc=1/(d*(32*tau+6*d)/(13*tau+8*d));D3_cc=4*d*tau/(11*tau+2*d);二阶延时系统的模拟
尝试用 来模拟
,二者的阶跃响应如图:
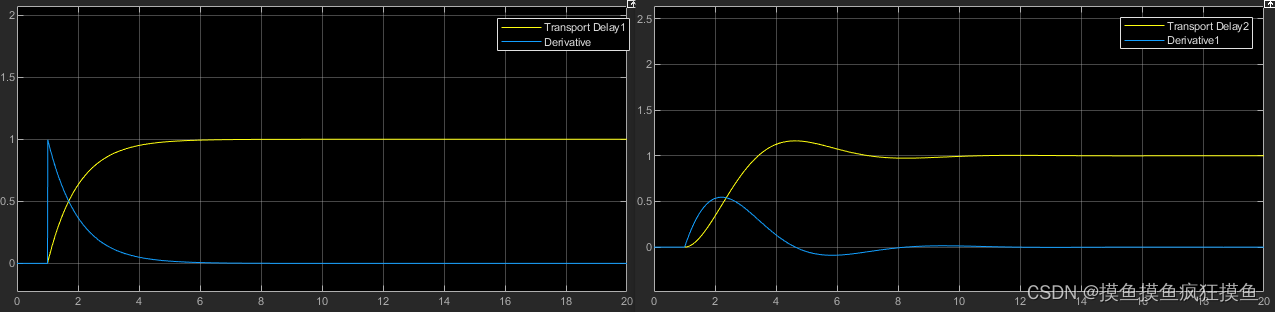
左图是Z-N法,右图是C-C

系统的开环阶跃和闭环PID如图所示:
|
|
|
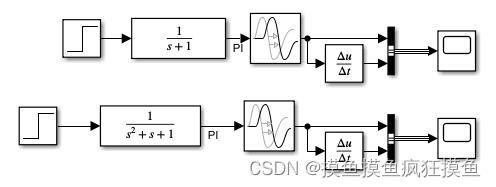
发现是不是用不带延时模块的二阶系统,和一阶延时更近似呢?
不过看起来控制效果没啥变化

将最终到达稳态值的时间点6作为稳定点,重新设置时间常数![]() 为1,时滞为s=0.5,可以得到:
为1,时滞为s=0.5,可以得到:
|
|
|
虽然这两个的阶跃响应图像已经很接近了,但不知道为什么就是振荡的很厉害,但整体来说 PID 勉勉强强;
提出修改措施:
- 更精准的函数模拟(控制效果反推)
- 讨论控制效果与
 的关系
的关系
函数模拟
对于高阶系统的阶跃响应图像,总是呈现 S 形,选取图像上斜率最大的一点作切线,与起始位置和终止平衡位置的交点分别对应d和:
垃圾桶(果然最开始做的总是垃圾)
拉线得到![]()
![]() (之后发现这个有误),将参数输入到一阶延时的模拟:
(之后发现这个有误),将参数输入到一阶延时的模拟:
感觉不是贴合的很紧密
优化函数模拟
同样的,Z-N法的控制效果优于C-C,并且两种方法均是PID控制效果更好;
如果把时间常数减小:τM=70![]() 感觉吻合的很不错
感觉吻合的很不错
而Z-N(右图)仍然优于C-C:

而且与调整参数前相比,振荡有所减弱
所以真正可靠的参数选择应该以斜率最大值点为分界点,其左为时滞d,其右为时间常数τM![]()
对于这个系统的响应曲线来说,分界点坐标为(80.215,0.1626),
作切线与两平行线交点分别为(36,0)(155,0.5),因此![]()
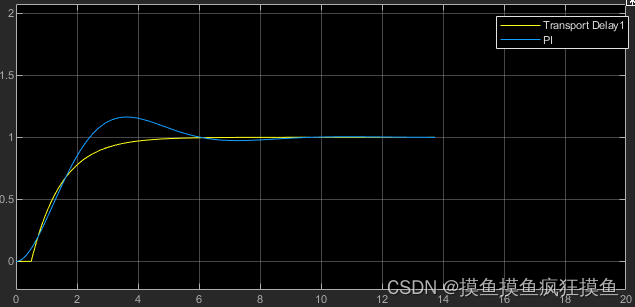
阶跃响应对比:

而在控制时都没有给高阶系统加入延时模块,如果加入延时进行控制,如延时100s:![]() :这时选取PID的控制效果更好
:这时选取PID的控制效果更好

⭐总结⭐
在用一阶延时模拟高阶延迟系统时,通过高阶的阶跃响应S曲线,求导取最大值点,做切线交于起始位置和平衡位置,零点到前点、切点与后点的时间间隔分别为d、τM![]() ,再根据前文总结表格选择最优的控制方法
,再根据前文总结表格选择最优的控制方法
在上面的控制中,高阶系统并未加入延时模块。因此d的大小其实与系统无关,而是决定了参数,选用不同的d:
由于上面的实例均为时滞比较大的情况,修改高阶函数的滞后时间为100s,取![]() ,阶跃响应:
,阶跃响应:
C-C法中的PI控制最优,符合之前表格中的结论
而如果将d改为75,即与时间常数相同,得到仿真参数如下:

参数修正
加入延时模块
在这里给实际受控系统加入延时模块:
对于使用上面的方法得到时滞两个参数,是否可以找到方法去优化这两个参数?
尝试使用PID自动tune,调出来的参数与此前C-C法的PID参数对比:
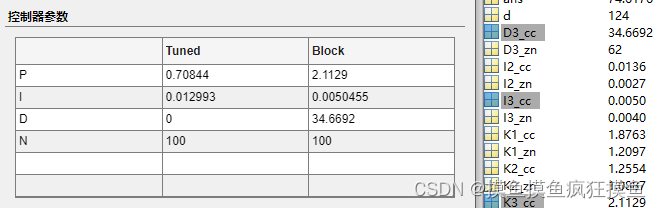
由于根本没使用到微分项,因此改为和PI控制器进行比较:
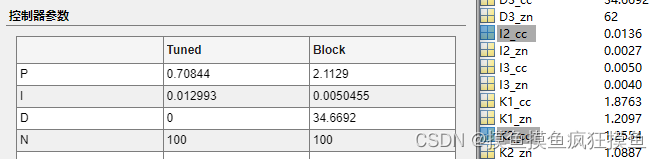
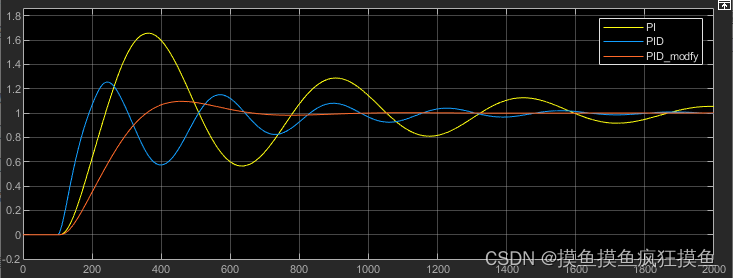
修正后的控制效果果然更好
如果一开始,就以斜率极大值切点横坐标作为时滞参数d,即d=160.5,代入

控制效果更好一点
⭐总结⭐
- 如果受控高阶系统中不含延时模块,如
,在阶跃响应图中找到切点到右点的间隔时间常数后,给其一个和时间常数接近或稍大的时滞,代入公式求参;
- 如果高阶系统本身就含有延时模块,如
,可以在响应图像的基础上稍微修改一下对于参数的确定,以切点的横坐标作为时滞d往往更加合适;
例如在按照常规思路算出左点横坐标d=36,代入后:

而如果选取切点作为d=80:

控制效果改善了一些
当然如果去看同样的参数控制的无延迟模块的效果,由于此时符合d与![]() 相近的原则,控制效果还可以
相近的原则,控制效果还可以

仿真调参【IMC-PID 内模控制整定】
内模控制框图与传函推导:![]() 是过程
是过程
|
|
|
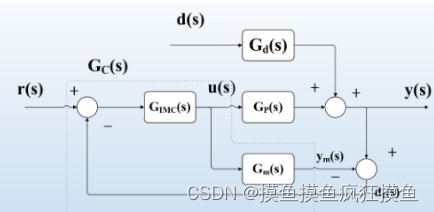
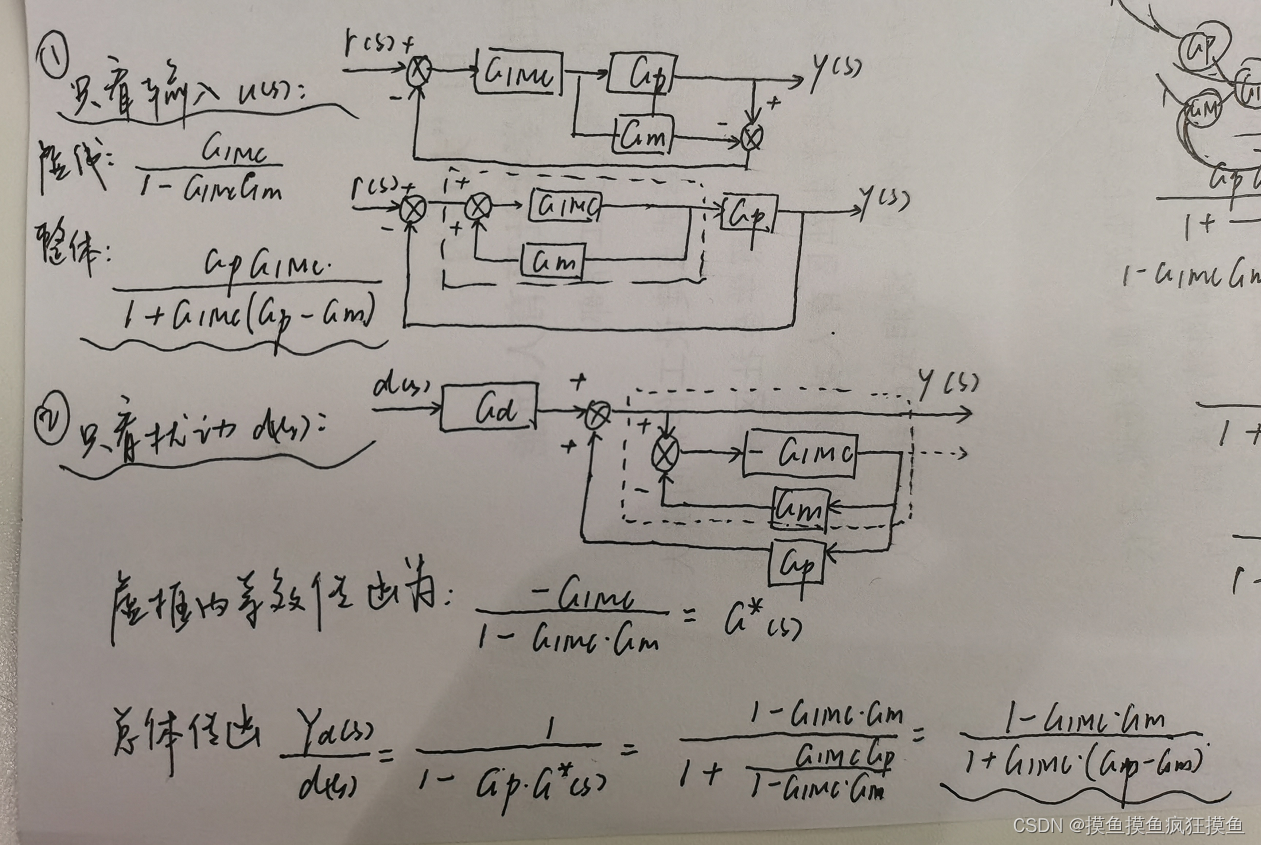
而内模控制PID整定的原理就是输入传函计算中,虚线框内的,就相当于所选用的PID控制
而内模控制消除干扰d的最大原则是过程函数![]() ,即与被控系统的形式相同,基于内模原理的PID
,即与被控系统的形式相同,基于内模原理的PID
其参数计算公式正是据此推导,同样参考:基于内模原理的PID控制器参数整定
对于被控系统,
,
![]()
根据内模控制原理(含低通滤波),得到
代入可得:
将其taylor展开:
就可以得到
⭐结论⭐
(参考链接)
而书上P15有各种系统的结论:ϵ是所设计的理想的一阶延时系统(相当于低通滤波)
- 关于一阶延迟
:
,
(和推导吻合)
- 关于二阶延迟
:
,
 ,
,
而修正之后
- 关于
:
,

- 关于
:
 ,
,
- 关于
:
 ,
,
仿真
一阶延迟
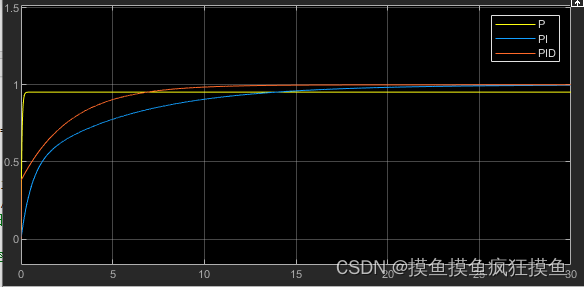
对于一阶延迟系统 ,仿真并与C-C法相比较:
可以看出IMC方法确实更加优秀
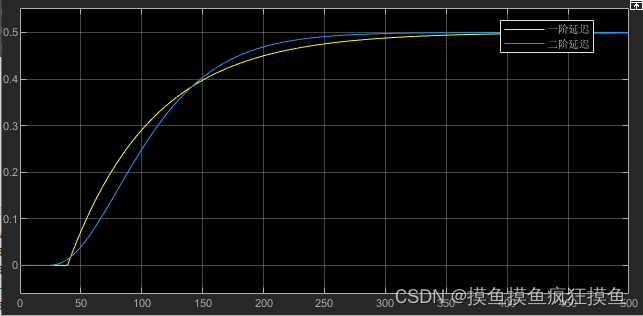
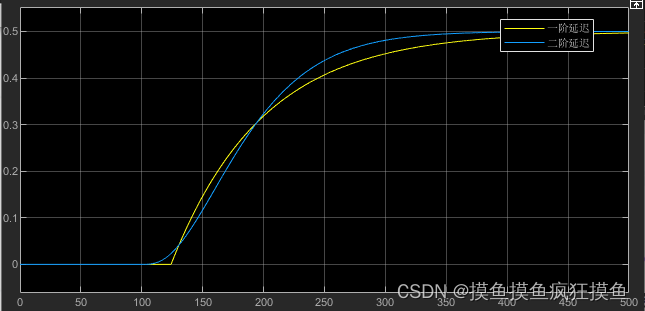
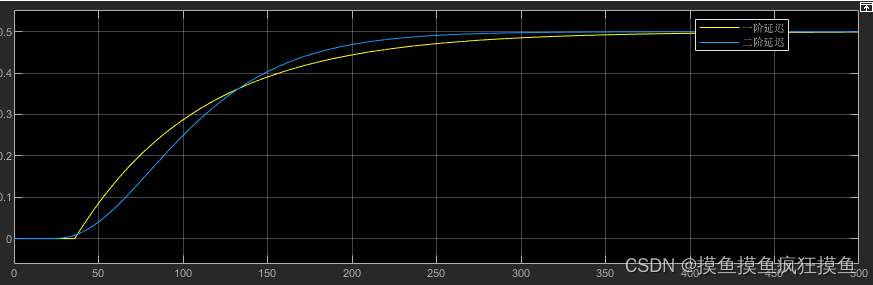
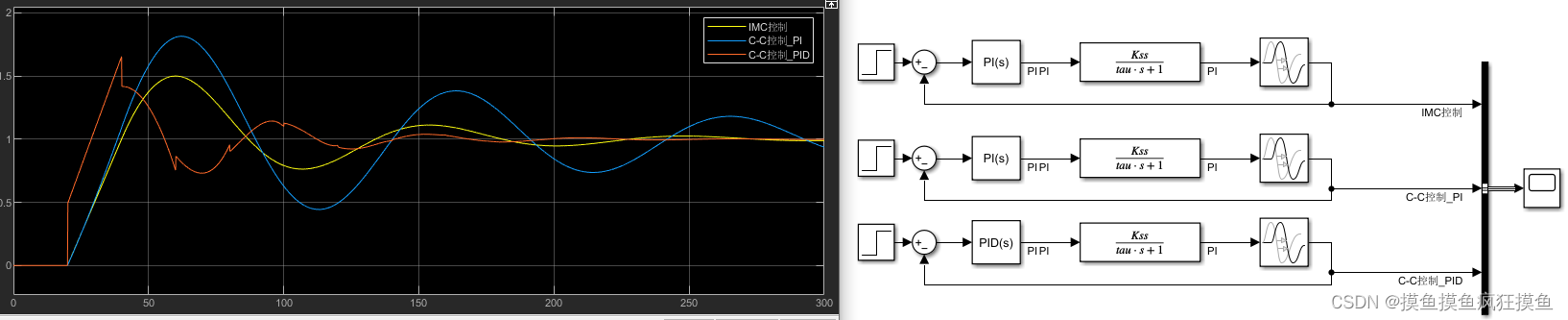
二阶延迟
对于二阶延迟系统 ,先通过阶跃响应得到其一阶延迟近似(d=54.5,tau=70)
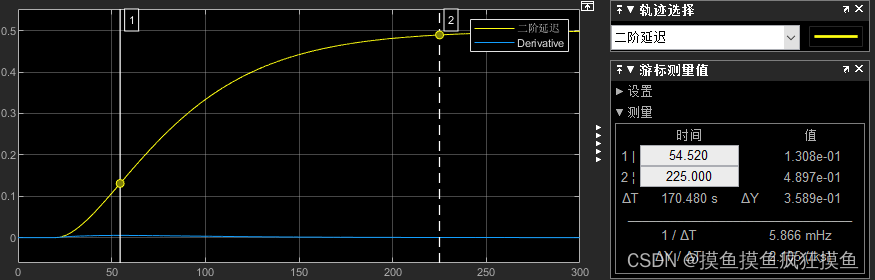
仿真并与C-C法对比,可以发现IMC更优

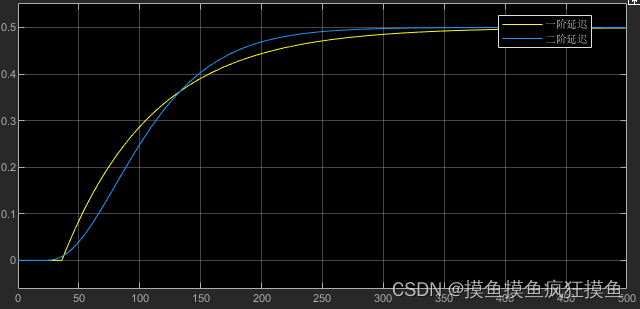
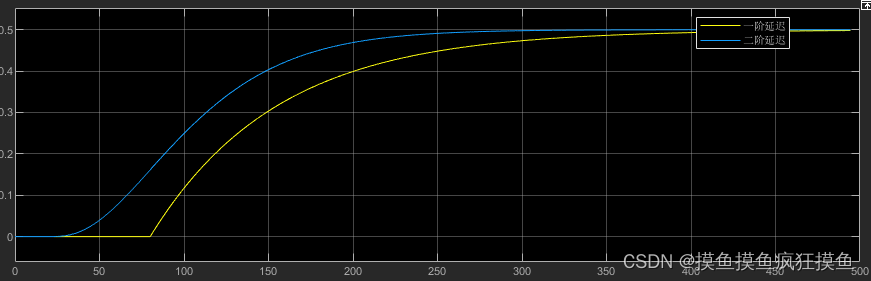
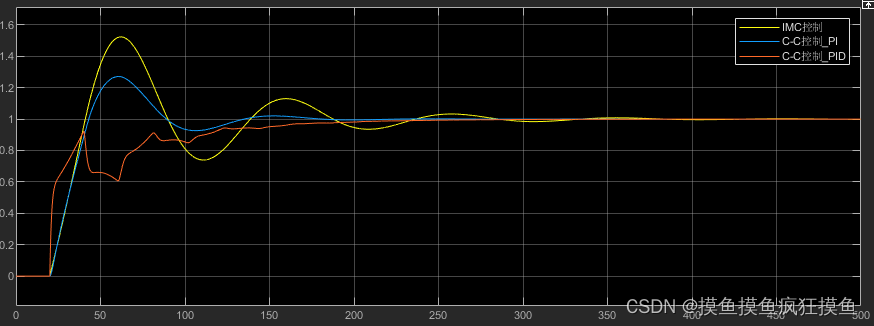
而如果实际系统中的延时模块去除后,仿真可得:(左为二阶,右为一阶)

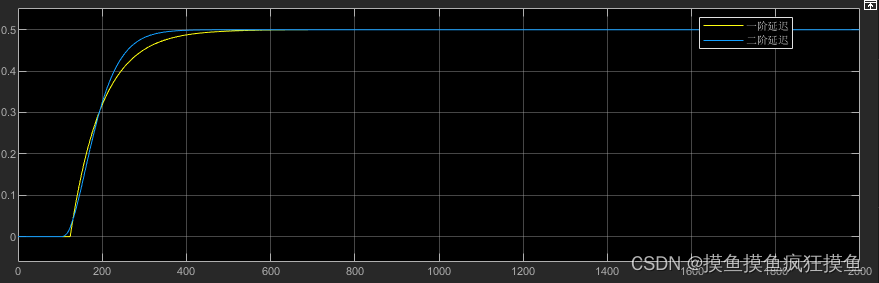
带有延时模块:
d=20;tau1=30,tau2=40(C-C法的等效是d=40,tau=70)
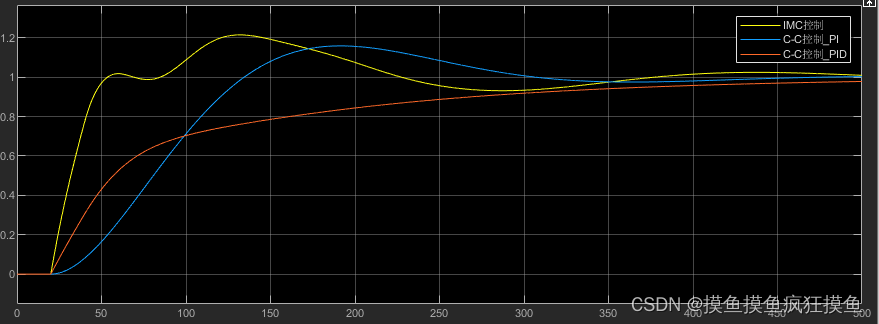
d=20,tau1=5,tau2=1(C-C法等效 d=22,tau=6,为小时滞比)
d=5,tau1=30,tau2=40(C-C法等效 d=40,tau=70,为大时滞比)

⭐总结⭐
综合方法的简便性、可靠性等因素:
- 当被控系统不含有时滞模块时,使用Z-N/C-C或IMC方法均可,对于二阶系统使用IMC更为简便;
- 当被控系统中含有时滞模块时,使用IMC可以减弱振荡的幅度;
- 对于二阶延时系统,当被控系统的时间常数
 较大时,使用IMC一般快速性优于C-C法,但C-C的PID超调小;
较大时,使用IMC一般快速性优于C-C法,但C-C的PID超调小;
IMC的计算代码:
%%---------------------开环阶跃响应图像参数
d = ;tau = ;Kss = ;epsi = ;tau1 = ;tau2 = ;
%%---------------------注意simulink中控制器要选用理想型(不用并行)
%%---------------------IMC-PID法_适用于一阶延迟系统
K1_imc=tau/Kss/(epsi+d);I1_imc=1/tau;
%%------与C-C法相比较
K1_cc=tau/Kss/d*(1+d/3/tau);
K2_cc=tau/Kss/d*(0.9+d/12/tau);I2_cc=1/(d*(20*tau+3*d)/(9*tau+20*d));
K3_cc=tau/Kss/d*(4/3+d/4/tau);I3_cc=1/(d*(32*tau+6*d)/(13*tau+8*d));D3_cc=4*d*tau/(11*tau+2*d);
%%---------------------IMC-PID法_适用于二阶延迟系统
K2_imc=tau1/Kss/(epsi+d);I2_imc=1/min(tau1,4*(epsi+d));D2_imc=tau2;
%%---------------------IMC-PID法_适用于积分延迟系统
K3_imc=1/Kss/(epsi+d);I3_imc=1/4/(epsi+d);
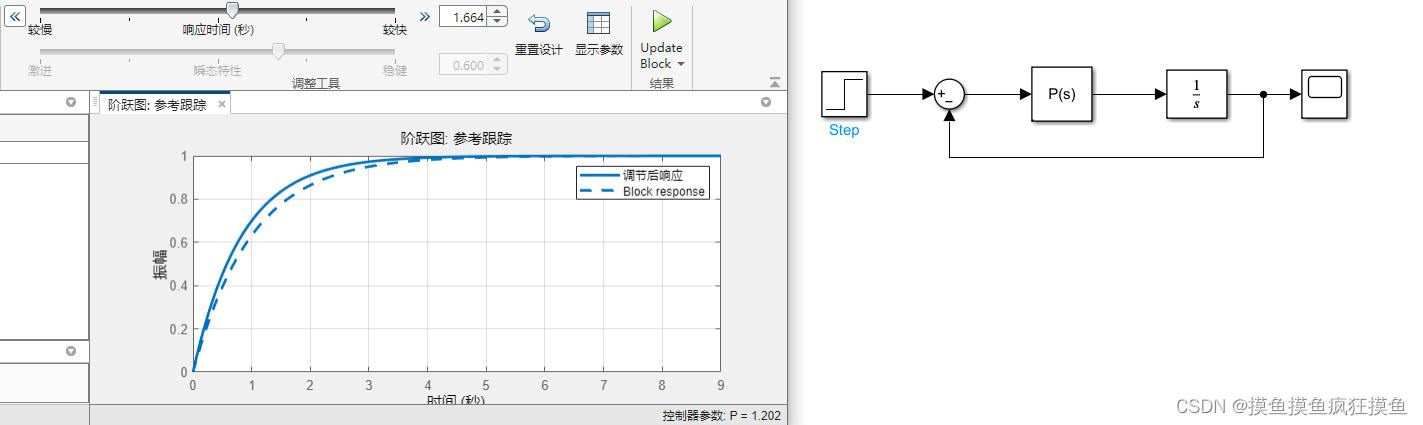
仿真调参【P-V法】
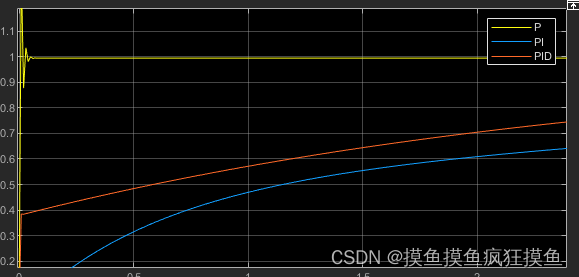
只适用于一阶延时系统,对于 ,灵敏度峰值分别为1.4和2的仿真结果如下:

如果修改一下参数,对于 ,灵敏度峰值分别为1.4和2的仿真结果如下:

两种情况好像都是PI控制效果更好,与之前的IMC或者C-C法相比较:
仿真
大时滞比
对于d=5,tau=20的大时滞比:PV法控制结果:

C-C法与Z-N法:
小时滞比
对于d=20,tau=5的小时滞比:PV法控制结果:

C-C法与Z-N法:
去掉延时模块:

⭐总结⭐
- P-V法只适用于一阶延时系统,对于时滞参数d大的系统,控制效果优于IMC或C-C法;
- 如果被控系统不含有延时模块,则C-C法或Z-N法都能取得比P-V超调更小的控制效果;
- 对于P-V法本身而言,灵敏度峰值
 较大时,控制较快,但容易有振荡,无论什么时候选择灵敏度峰值较小的参数调整更好;PI控制器超调小,PID超调较大;
较大时,控制较快,但容易有振荡,无论什么时候选择灵敏度峰值较小的参数调整更好;PI控制器超调小,PID超调较大;
参数计算代码:
%%---------------------开环阶跃响应图像参数
d = ;tau = ;Kss = ;
%%---------------------注意simulink中控制器要选用理想型(不用并行)
%%---------------------P-V PI控制 灵敏度峰值分别为1.4/2
K1_pv=(0.2958*(d/(d+tau))^(-1.014)-0.2021)/Kss;I1_pv=1/tau/(1.624*(d/tau)^0.2269-0.5556);
K2_pv=(0.5327*(d/(d+tau))^(-1.029)-0.2428)/Kss;I2_pv=1/tau/(1.44*(d/tau)^0.4825-0.1019);
%%---------------------P-V PID控制 灵敏度峰值分别为1.4/2
K3_pv=(0.1724*(d/(d+tau))^(-1.259)-0.05052)/Kss;I3_pv=1/tau/(0.5968*(d/tau)^0.6388+0.07886);
D3_pv=tau*(0.5856*(d/tau)^0.5004-0.1109);
K4_pv=(0.2002*(d/(d+tau))^(-1.414)+0.06139)/Kss;I4_pv=1/tau/(0.446*(d/tau)^0.9541+0.1804);
D4_pv=tau*(0.6777*(d/tau)^0.4968-0.1499);


















 9459
9459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









