





由于实际不如理论那么理想
实际噪声并不是零均值高斯噪声
实际当中可能存在错误观测
观测数据还存在匹配问题(数据关联)
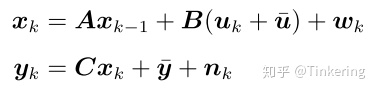
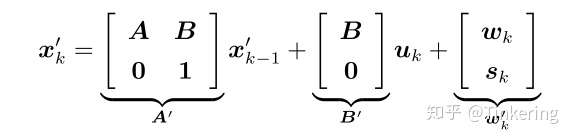
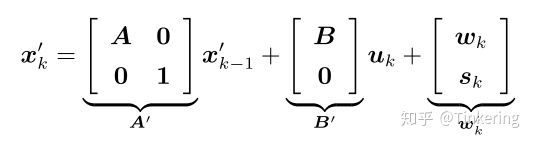
处理输入和测量的偏差
偏差对卡尔曼滤波器的影响
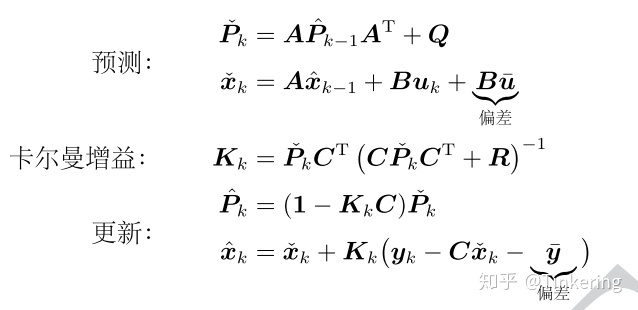
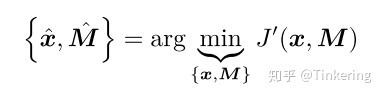
为了有效抑制偏差,我们必须知道偏差的精确值。但在大多数情况下,并不能得到偏差的精确值。因此,我们一边估计状态,一边估计偏差。
未知的输入偏差
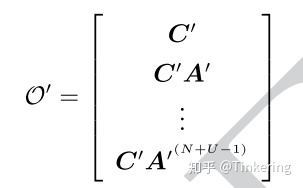
增广状态构建的滤波器会不会收敛到正确的结果?
解存在唯一解的条件为:增广后的能观性矩阵满秩
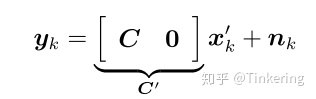
未知的测量偏差
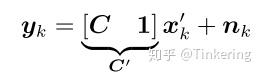
解存在唯一解的条件为:增广后的能观性矩阵满秩
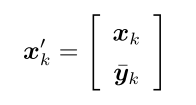
例5.3是一个典型的SLAM问题,不能观;对于批量式LG估计和KF估计:
批量式LG估计存在无穷多组解;
KF估计初始时刻引入的偏置将一直存在于系统中;
对上两种情况,都有一些解决方案;
数据关联
数据关联问题就是找出每一个测量信息对应于模型中的哪一部分。
外部数据关联
内部数据关联
处理外点
将非常不可能的测量值(根据测量模型)称为外点(outlier)。
RANSAC
M估计
主要是通过减小外点在优化函数中的权重;
迭代重加权最小二乘法(IRLS)
协方差估计
同时估计状态和协方差,有时称为自适应估计;
自适应估计可以转化为使用IRLS方法的M估计问题;















 2681
2681











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









