






点击上方“计算机视觉cv”即可“进入公众号”
重磅干货第一时间送达
- 论文题目:Faster R-CNN: T owards Real-Time Object Detection with Region Proposal Networks
- 论文链接:https://arxiv.org/abs/1506.01497
研究目标
Faster R-CNN是为了改进Fast R-CNN而提出来的。因为在Fast R-CNN文章中的测试时间是不包括search selective时间的,而在测试时很大的一部分时间要耗费在候选区域的提取上。所以作者提出了RPN来提取候选框,使时间大大的减少了。
Faster R—CNN网络介绍
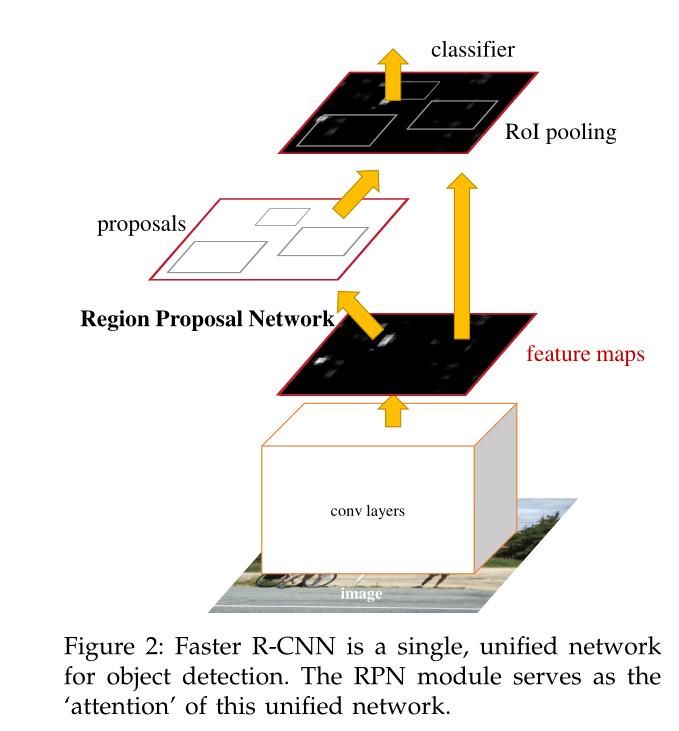
Faster R—CNN具体可分为四个结构:
Conv layers:作为一种CNN网络目标检测方法,Faster RCNN首先使用一组基础的conv+relu+pooling层提取image的
feature maps。该feature maps被共享用于后续RPN层和全连接层。Region Proposal Networks:RPN网络用于生成region proposals。该层通过softmax判断anchors属于 positive或者 negative,再利用bounding box regression修正anchors获得精确的proposals。
Roi Pooling:该层收集输入的feature maps和proposals,综合这些信息后提取proposal feature maps,送入后续全连接层判定目标类别。
Classification:利用proposal feature maps计算proposal的类别,同时再次
bounding box regression获得
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4366
4366











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









