






先放最终效果:
十天前我打算用我之前的CPU渲染器渲染一张博客封面,大概是这张。

我之前的渲染器是使用C#写的,已经进行过多线程优化。但是为了渲染这张图我坐等两个多小时(7680*1159, i7-8700k)。坐等的时候我便决定,我要搞GPU渲染器...
之前有几位大佬使用OpenGL,Vulkan,Unity等用Shader的方式实现了GPU光线追踪:
Ubp.a:基于OpenGL的GPU光线追踪zhuanlan.zhihu.com
但是我这里为了学习并行计算使用的是CUDA。本文并不是一个教程,因为光线追踪部分与下面文章重复了。本文的重点是分享一些CUDA编写光线追踪渲染器时候遇见的一些坑。
破晓:【翻译】两天学会光线追踪(一)zhuanlan.zhihu.com
关于CUDA可以看看这里 我是小将:CUDA编程入门极简教程。简单地说,CUDA可以同时启动上千万个线程(Kernel)进行并行计算。但是CUDA的Kernel需要注意以下问题。
CUDA值得注意的特性(坑)
0.传递数据
CUDA在从内存传数据到显存的时候使用的是cudaMalloc和cudaMemcpy, 对象中以指针储存的字段都需要单独复制一遍。所以这个在传递二叉树和派生类的时候可能会有一些棘手。
- 不支持递归
由于GPU的目的是高并行运算,所以GPU的计算单元并没有CPU那么强的计算能力。最明显的一点就是GPU的Kernel的栈深度无法支持递归,经测试Kernel递归三四次后在就会崩掉...
解决办法就是讲所有递归代码改成循环。比如光线追踪射线采样,BVH查找这些高度依赖递归的函数都需要改成循环。
2. 不支持虚函数
比如B类继承自A,A类中定义了一个虚函数(Virtual function),而B类中覆盖(override)了这个函数。且B对象是在CPU端创建的(从Host创建)。那么在GPU上调用B的这个函数时,程序就会卡死。而且是那种用任务管理器,taskkill 都关不掉的卡死。
解决办法是在GPU端创建这个对象B(从device创建),我的写法是在B类中声明一个构造函数,参数是B*, 然后初始值全都从这个指针中取。在Host中的对象传到Device后重新构建一遍对象,这可能有一丢丢慢,但每次渲染只需要构建一次。
3. 不支持STL,但支持thrust
最开始在我构建BVH树的时候我是在GPU上构建的,因为懒得传二叉树。而这样做的弊端不仅是GPU的一个线程计算力远低于CPU。并且GPU不支持STL的qsort, Vector<T>. 无法排序就无法构建BVH。
但是英伟达提供了thrust库,理论上可以在GPU端上代替STL。
4. 显存层级
GPU上的显存共分为三个层级,Global Memory, Shared Memory, Local Memory.
读取耗时方面,L存 < S存 <<G存 << 内存。
local memory是最快的,但是需要注意一个问题,每个Kernel的local memory大小是650000字节,如果使用量超过了这个量,就会崩溃。
5.在Device慎用 new,malloc
这两个操作是在Device端创建一个Global Memory,这个弊端是很慢。我相信每个使用GPU加速的程序都是对效率敏感的。
6. 异常处理
可以在每次调用完Kernel写
auto error = cudaGetLastError();
if(error!=0)printf("error %dn", error);
来检测有没有Error抛出。(我每次使用Nsight调试整个电脑就会崩,可能是我自己的问题)
而在我写渲染器的时候出现最多的是Error 77“内存越界”,一般的内存越界很容易避免,但是我依然遇到很多很迷的崩溃然后抛出Error77,据我猜测应该包含但不限于以下两种情况:
- kernel栈溢出
前面说过,Kernel的栈深度并不够用,第一种解决办法是消除递归,减少函数相互调用等。第二种是 将项目从Debug模式改成Release模式,这样编译器的优化就会发挥作用。
- Local Memory超过了极限,
将不需要的对象及时的free掉,或者使用cudaDeviceSetLimitAPI设置最低Local Memory大小。
7. 随机数
在之前的项目中我的随机数使用的是drand48(),但是CUDA提供了一个更高效的随机数生成器curand。
curand提供多种随机数序列。我用的最多的是最普通的curand_uniform,在我的光线追踪采样中,我确保每个像素的采样序列都不一样,不然就会出现很多奇怪的效果

我为每个像素都创建了一个currandState
//Host
#include <curand_kernel.h>
//...
curandState *d_rng_states = nullptr;
cudaMalloc(reinterpret_cast<void **>(&d_rng_states), height * width * sizeof(curandState));
而种子方面,使用像素的唯一id。
//Device
const auto tidx = blockIdx.x * blockDim.x + threadIdx.x;
const auto tidy = blockIdx.y * blockDim.y + threadIdx.y;
curand_init(seed + tidx + tidy * d_width, 0, 0, &rngStates[tidx]);
这样在每次调用
curand_uniform(&rngStates[tid]) //tid = tidx + tidy * width
就可以生成一个0~1的随机浮点数了。
7. 纹理
在CPU渲染器中我使用byte[] 储存的纹理信息,如果在Cuda中也使用 unsigned char* 的话,会消耗很多的Global Memory,并且最重要的是,Global Memory很慢。
幸运的是Cuda提供了一个Texture解决方案,这个Texture储存在一个特定的显存区域可以极大地提高读取速度。
在Cuda的示例 0_Simple/simpleTexture项目中,项目实现了一个简单Texture,这个Texture通过绑定到了一部分显存提供更快的读取。甚至不需要传递指针到kernal即可当全局变量使用。
但是有两个问题:
第一个问题,这个Texture不能是数组或者指针数组。也就是说Texture的数量在编译的时候就是写死的。
解决方案:1. 将所有的纹理都合并到一张Atlas,这理论上是最快的,效果大概是这样:

第二个方案是使用Texture的BindlessTexture功能,这个在CUDA的示例 2_Graphics/bindlessTexture项目中有实现。而我采用的就是这种方法。
CudaTexture第二个问题是如何绑定RGB三通道,示例项目中的颜色通道只有一个,并且值类型是float,我尝试使用uchar3类型来储存三个RGB值但是没有成功。我最后使用的是LayeredTexture来创建三个层,代码在Cuda示例 0_Simple/simpleLayeredTexture项目。我不确定这是否是创建三通道纹理的最优方法,如果有其他写法,请让我知道谢谢。
三通道纹理的缓冲有点奇怪,是这样的,在创建之前需要修改一下。
//类型float
RRRRRRRRRRGGGGGGGGGGBBBBBBBBBB下面附Texture相关代码
//Host
inline void InitTextureList()
{
for (auto i = 0; i < TEXTURE_COUNT; i++) {
//读取纹理,使用了stb_image库
int width, height, depth;
const auto tex_data = stbi_load(imageFilenames[i],&width, &height, &depth, 0);
const auto size = width * height * depth;
float* h_data = new float[size];
printf("LoadTexture %d,%d,%dn", width, height, depth);
for (unsigned int layer = 0; layer < 3; layer++)
for (auto i = 0; i < static_cast<int>(width * height); i++)h_data[layer*width*height + i] = tex_data[i * 3 + layer] / 255.0;
//cudaArray Descriptor
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(32, 0, 0, 0, cudaChannelFormatKindFloat);
//cuda Array
cudaArray *d_cuArr;
cudaMalloc3DArray(&d_cuArr, &channelDesc, make_cudaExtent(width, height, 3), cudaArrayLayered);
cudaMemcpy3DParms myparms = { 0 };
myparms.srcPos = make_cudaPos(0, 0, 0);
myparms.dstPos = make_cudaPos(0, 0, 0);
myparms.srcPtr = make_cudaPitchedPtr(h_data, width * sizeof(float), width, height);
myparms.dstArray = d_cuArr;
myparms.extent = make_cudaExtent(width, height, 3);
myparms.kind = cudaMemcpyHostToDevice;
cudaMemcpy3D(&myparms);
cudaResourceDesc texRes;
memset(&texRes, 0, sizeof(cudaResourceDesc));
texRes.resType = cudaResourceTypeArray;
texRes.res.array.array = d_cuArr;
cudaTextureDesc texDescr;
memset(&texDescr, 0, sizeof(cudaTextureDesc));
texDescr.filterMode = cudaFilterModeLinear;
texDescr.addressMode[0] = cudaAddressModeWrap; // clamp
texDescr.addressMode[1] = cudaAddressModeWrap;
texDescr.addressMode[2] = cudaAddressModeWrap;
texDescr.readMode = cudaReadModeElementType;
texDescr.normalizedCoords = true;
cudaCreateTextureObject(&textlist[i], &texRes, &texDescr, NULL);
}
}
//Device
const auto albedo =Vec3(
tex2DLayered<float>(texs[texid], rec.u, 1-rec.v, 0), //R
tex2DLayered<float>(texs[texid], rec.u, 1 - rec.v, 1),//G
tex2DLayered<float>(texs[texid], rec.u, 1 - rec.v, 2));//B
8. BVH层次包围盒
在Kernel写BVH真的是刺激....
首先正如前面所说,BVH必须在CPU创建,所以从Host向Device复制数据时候,需要复制一棵二叉树,二叉树的子节点还是个派生类的指针.....
由于我之前没单独学过C语言的内存管理,所以这部分消耗了我整整两天一夜的精力。
我最后的解决方案是将所有对象包括BVH节点放在一个父类指针数组(Hitable**)中先传到Device。每个对象都被赋予一个id,也就是在数组中的位置。而BVH树的左右节点只是个int对象。
二分查找部分,由于这部分原始代码高度依赖于递归,需要改成循环。这部分我参考了
https://devblogs.nvidia.com/thinking-parallel-part-i-collision-detection-gpu/devblogs.nvidia.com Thinking Parallel, Part II: Tree Traversal on the GPU | NVIDIA Developer Blogdevblogs.nvidia.com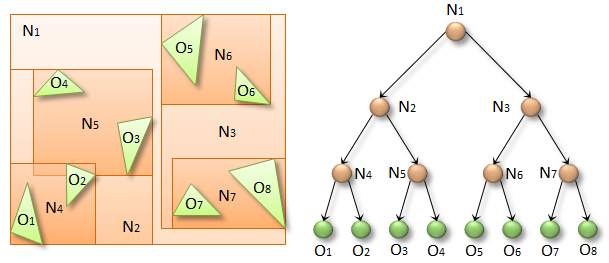
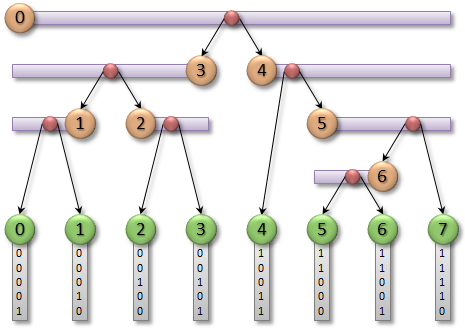
其中在第II部分,Minimizing Divergence 部分中的traverseIterative函数中。我创建的是
int stack[64];并且这部分在每个像素的最初始被创建,每次查找时只是重设为0,最后记得free掉这个数组。目前调试BVH依然有问题,渲染个茶壶是没有问题的,

但是换成Bunny就会抛出Error 77。目前还没有解决。
代码目前开源在:
Asixa/ALightGPUgithub.com
由于之前没怎么写过C++项目,代码可能有些乱,深表歉意,明天开学,等过一阵子可能才开始修BUG和整理代码。
关于为什么我为什么全都写在头文件里,因为CUDA的编译器如果想要代码分离的话需要开启【generate relocatable device code】但是这样会导致编译器无法进行代码优化。似乎另一种解决方式是使用CUDA的*.cuh和*.cu文件进行代码分离,但是我目前还没有测试成功。如果这样可以的话之后整理代码的时候会进行代码分离。














 2916
2916











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









