






1、限位开关在机械手控制项目中的工艺要求
本例程的传送机械手装置用于分拣大球和小球,并且将小球和大球分别放入两个不,同的箱体中。机械臂原始位置在左限位,电磁铁在上限位。接近开关PX1用于检测是否有球。限位开关SQ1~SQ5分别用于传送机械手上下左右四个运动方向的定位。大小球分捡传送机械手装置示意图如图所示。
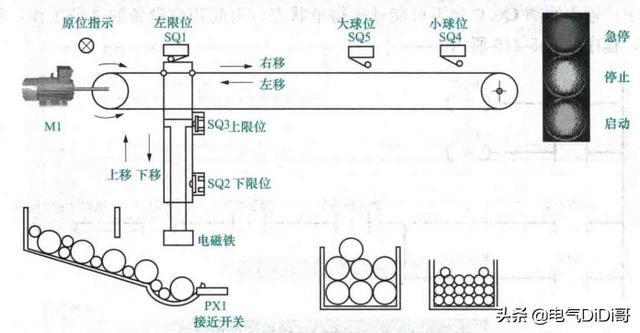
大小球分拣传送机械手示意图
2、电气原理图
本装置内的电动机采用AC380V/50Hz三相四线制电源供电,电动机M1带动机械手臂左右移动,右移时中间继电器CR2的线圈接通,其常开触点控制KM2的线圈闭合,串接在KM2线圈控制回路中的KMI的辅助常开触点使电动机不能进行左移动作。左移时中间继电器CR1的线圈接通,其常开触点控制KM1的线圈闭合,串接在KM1线圈控制回路中的KM2的辅助常开触点使电动机不能进行右移动作。电气原理图如图所示。
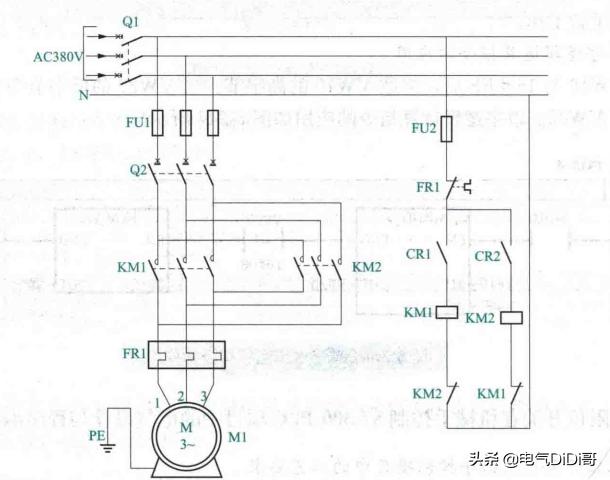
电气原理图
3、控制原理图
本示例采用AC220V电源供电,并且通过直流电源POWER Unit将AC220V电源转换为DC24V电源供给PLC用电。空气开关Q3作为电源隔离短路保护开关, PLC控制原理图如图所示。
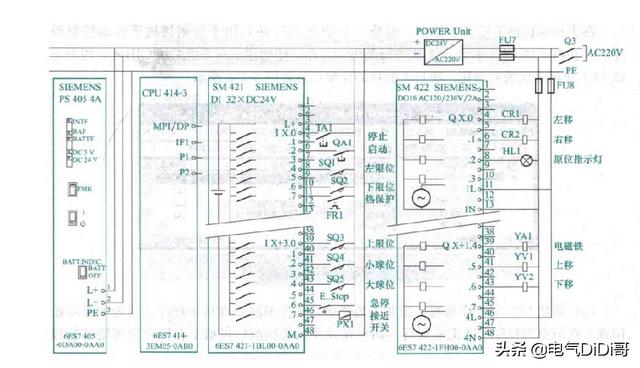
大小球分拣传送机械手控制原理图
4、大小球分拣传送机械手的程序编制
设备在启动后,当接近开关检测到有球时电磁杆就下降,如果电磁铁碰到大球时下限位开关不动作,如果电磁铁碰到小球时下限位开关就会发生动作。而当电磁杆下降2s后电磁铁吸球,吸球的时间到达1s后上升,到上限位后机械臂右移,如果吸的是小球,机械臂到小球位,电磁杆下降2s电磁铁失电释放小球;
如果吸的是大球,机械臂到大球位,电磁杆下降2s,电磁铁失电释放大球,停留1s上升,到达上限位后,机械臂左移到左限位,并重复上述动作。如果要停止设备,必须在完成一次上
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 576
576











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









