





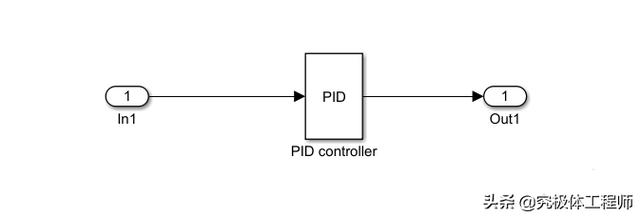
一、在Simulink画出PID控制器模型
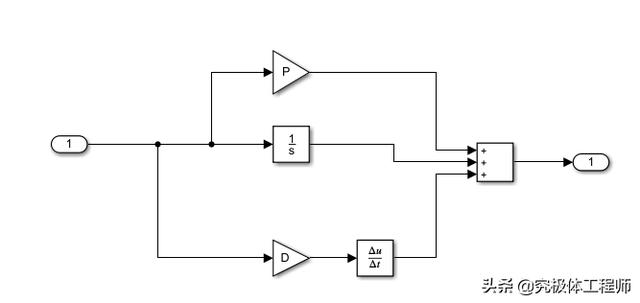
PID控制器模型
选中所有模块,右键在弹出的菜单中选择Creat Subsystem from slection,生成Subsystem模块,然后将名字更改为PID controller变成下图所示
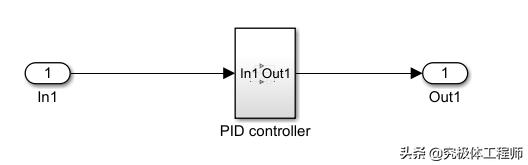
封装后的PID
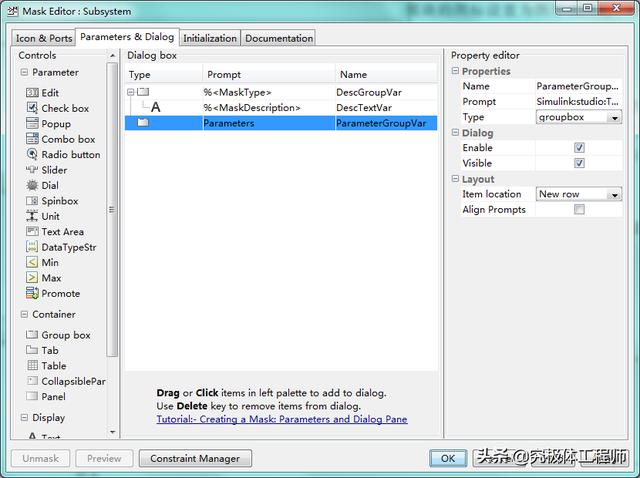
右键点击PID controller选择mask—>creat mask出现下图
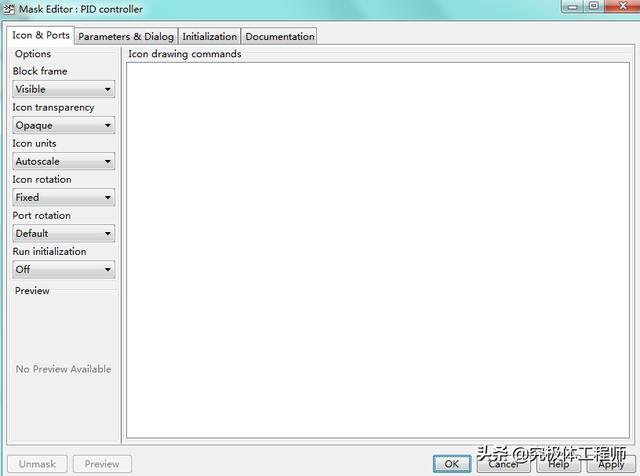
二、设置外观参数
在图表绘制命令栏(drawing conmmands)中写入disp('PID')。
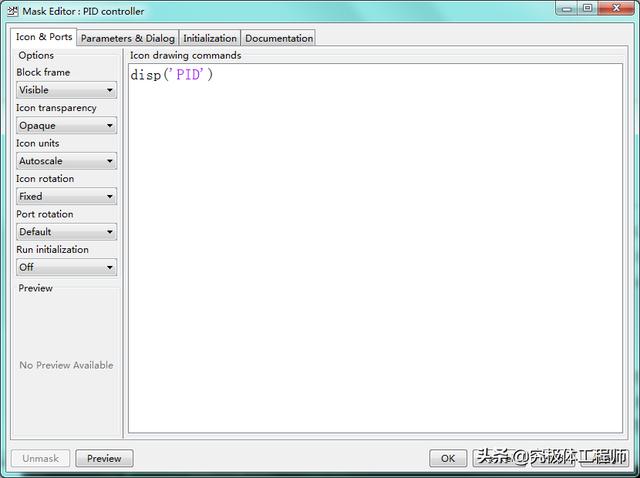
生成下图结果
另外在在图表绘制命令栏(drawing conmmands)可以写入描述性文本、图像图标、数学模型等。
1、描述性文本
disp('a') %图标上显示a文本字样。
disp(variablename) %variablename为工作空空间中的字符串变量名
text(x,y,'a') %在图标特定位置显示a文本字样
如果需要显示多行文本,可以使用换行。
2、数学模型图标
使用dploy命令可以将封装的子系统模块的图标设置为系统的传递函数,使用过droots命令可以设置为零极点传递函数,命令格式为:
dploy(num,den)
dploy(num,den,'character')
droots(z,p,k)
其中num,den为传递函数的分子和分母多项式,character为系统的频率变量;z,p,k分别为系统的零点,极点,增益。
3、图像图标
使用plot或者image命令可以将子系统模块的图标设置为图形或者图像。命令格式为:
plot(a,b)
image(imread(‘text’))
选择参数选项卡(parameters&dialog)如下图
选择图中左边栏第一个Edit,新增变量,如下图
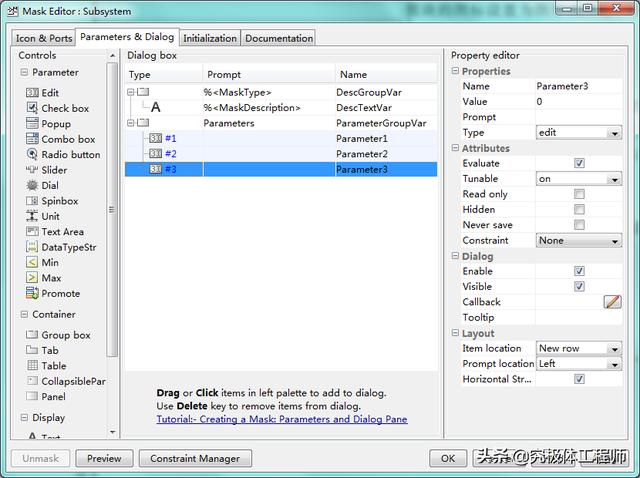
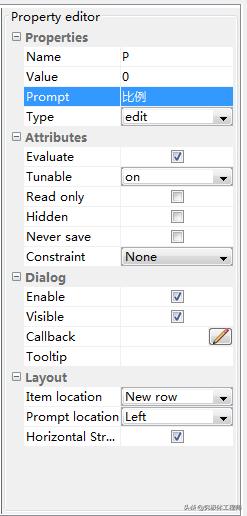
将新增的变量选中,在右边propery editor中双击修改name,value,prompt,type名字,值,类型
至此,子系统的PID封装基本完成。回到上一级目录双击封装好的PID controller出下 下图所示
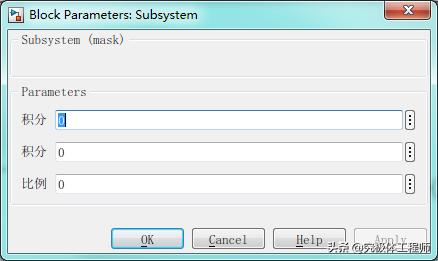
在此图中可以更改PID的参数。
封装成功


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









