






对极约束:

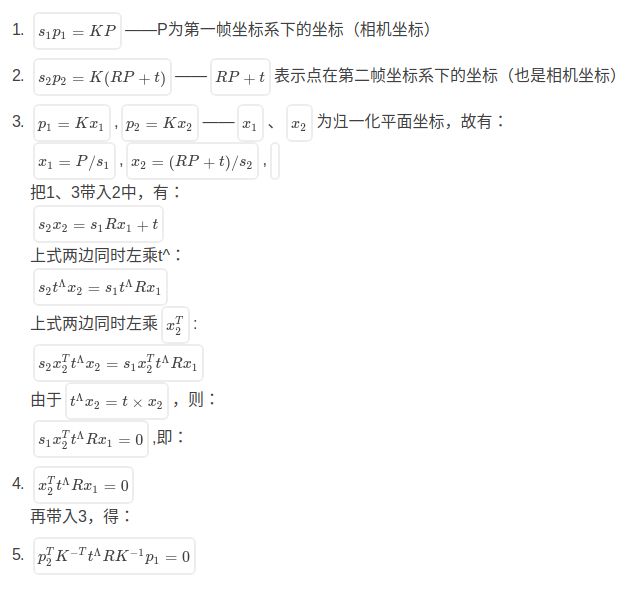
4式和5式都被叫做对级约束,4中的坐标为归一化平面坐标,5中的坐标为像素坐标(齐次坐标)。其中,E=t^R记作本质矩阵,F=K^(-T)EK^(-1)记作基础矩阵。
之前说过单目相机具有尺度不确定性,是由于图像是空间三维物体在二位平面的投影,不具有深度信息(也就是Z轴坐标)。这里从4式、5式中也能看出,在等式两边乘以非零常数等式仍成立,这也被叫做E的尺度等价性。
八点法求解本质矩阵
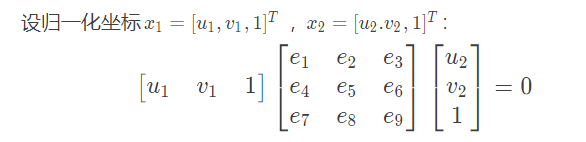
中间的3x3矩阵就是本质矩阵t^R,我们把这个矩阵展开为向量,重写上式:
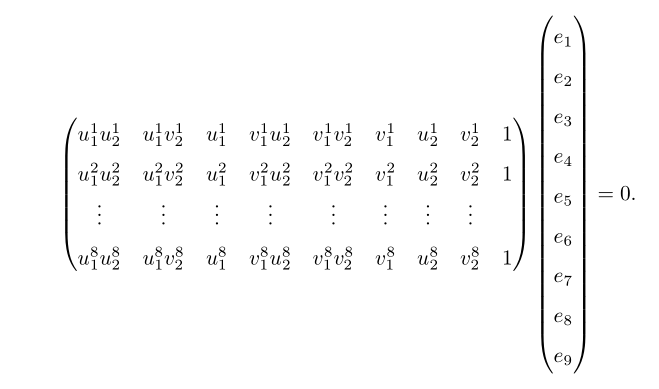
这是一个齐次线性方程组,显然系数矩阵的秩最大为8,但是有9个变量,因此多出一个变量无法约束,就会导致方程组的解不唯一,秩为8时解是一个常数乘以一个向量的形式。
选定一个E进行奇异值分解,即 E=UΣV^T。对于任意一个E,分解得到的t、R组成4组解:

其中R是旋转矩阵,下标Z表示旋转轴是Z轴,pi/2表示旋转的角度。
4种解对应4种不同的相机位姿:
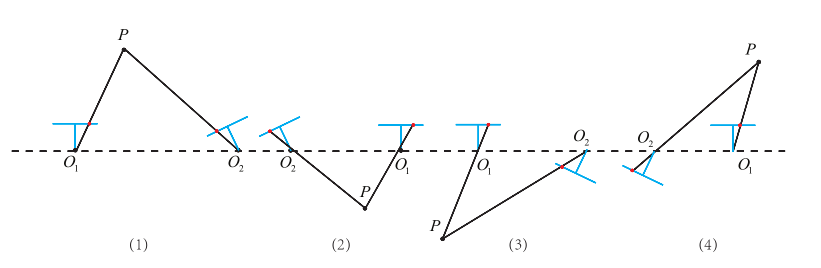
显然,只有第一种解是我们需要的。根据第一种解中三维点的深度都为正,我们选择对应深度都为正的那组解作为奇异值分解的结果。
由于本质矩阵E本身的尺度就是不确定的,所以由奇异值分解得到的旋转、平移也具有尺度不确定性,但旋转矩阵本身是一个行列式为1的正交阵,因此旋转矩阵就可以被确定,这样就只有平移向量的尺度是不确定的。
通常会把初始的平移归一化尺度为1,以后的计算以这个1为单位——这个1的实际大小不确定——导致了单目的尺度不确定性。
实际中特征匹配得到的匹配数往往会多于8对,这个时候可以构建最小二乘问题,然后利用优化算法(如高斯牛顿法、LM法)来得到一个极小值;或者利用RANSAC算法(随意采样一致算法,以后会介绍),可以从存在误匹配的数据中鲁棒地估计本质矩阵。
















 292
292











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









