





论文链接:SSD: Single Shot MultiBox Detector
文中所用代码(仅multibox_loss.py)链接:multibox_loss.py
Loss in SSD
数学公式部分
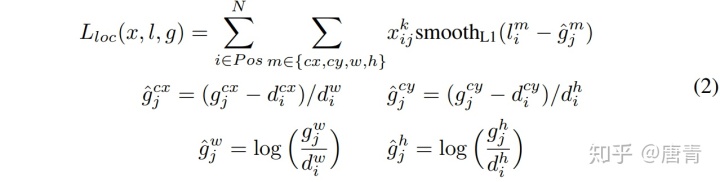
来自SSD论文第五页training objective段落。指示器

对于loc, 根据公式一步步来
- 首先,公式(2)中第一行:先对每个可匹配的默认框求这个框的置信度器
和
的乘积,loc即为所有能匹配框的该值的总和。其中
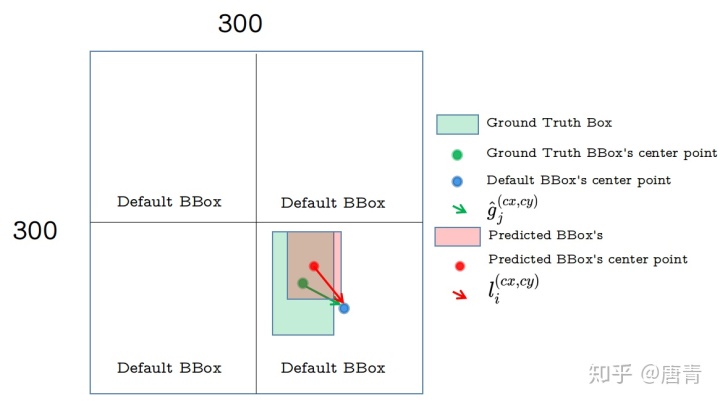
分别如figure 1 中红绿箭头
- 拆开看
,
。
为该框的中心点的x和y值,
为框宽,
为框长。公式(2)中第二行说明:
为
,公式(2)中第三行说明:
为
,如果
,则
;如果
,则
。附:论文中未说明,但
应也为对默认框的比例值。
对于conf,
先上公式(3),

拆分成两部分(Pos和Neg)看,即,在该次iteration计算里,一共有N(即
conf公式也拆分成两部分来看(conf loss 是指所有类别的loss):默认框为4个(如figure 1), 举例数据集有三类(0:背景,1:交通标志,2:信号灯)。
- 首先是
(即
时),2个默认框(Default BBox0,1,2)为可匹配默认框,因为
,根据公式
-2.33 这里(-1.6,-0.6)这两个值太大,即错误的框[(框0,类别2),(框1,类别1) ]loss大。正确的框/之后的预测框[(框0,类别1),(框1,类别2)]的loss小。= [0.8log(0.9) + 0.8log(0.01)] + [0.6log(0.1)+0.6log(0.7)] = [(-0.037)+(-1.6)]+[(-0.6)+(-0.093)]=
- (未完,代码hard negative mining部分说明)然后i 是
(即
),从figure 2中可看到Default BBox 3未能和任何Groundtruth BBox重合,即IOU太小(IOU<0.5),归类为未能

代码解读部分
一些相关参数(parameter):
- batch_size = 32
def predictions是一个元组(tuple),其中包含三个值
- loc_data:预测框位置点矩阵 size: (batch_size,num_priors,4) -> (32,8732,4)
- conf_data:预测框置信度矩阵 size:(batch_size,num_priors,num_classes) -> (32,8732,3)
- priors:先验框矩阵 size:(num_priors,4) -> (8732,4)
# match priors (default boxes) and ground truth boxes
举例idx的循环:
idx: 0
targets: tensor([[ 0.2781, 0.8527, 0.3834, 1.0000, 8.0000],
[ 0.5586, 0.8045, 0.6864, 1.0000, 17.0000],
[ 0.3089, 0.7861, 0.4178, 0.9122, 17.0000],
[ 0.4544, 0.7564, 0.5278, 0.8286, 19.0000],
[ 0.2012, 0.7861, 0.2343, 0.8768, 19.0000]])
truths: torch.Size([5, 4])
labels: torch.Size([5])
idx: 1
targets: tensor([[ 0.8637, 0.7126, 0.9310, 0.9073, 14.0000]])
truths: torch.Size([1, 4])
labels: torch.Size([1])
...
match() function:
- 返还新的loc_t (32, 8732, 4)和conf_t (32, 8732)值。loc_t: endcoded location targets。表示:32张图中,每张图里有8732个默认框:每个框对应该图中目标框的定位度loc_t( 4)和置信度conf_t(1)。每张图得出的维度分别为loc_t (8732, 4)和conf_t(8732, 1),一起处理32张图即维度分别为loc_t (32, 8732, 4)和loc_t (32, 8732)。
- 其中,overlap_threshold: 0.5, 默认框和真实框的IOU小于0.5的,设定为背景,该位置返还的conf[i] = 0.
conf, pos, num_pos的输入和size:
con_f: tensor([[0, 0, 0, ..., 3, 3, 3],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 8, 8, 0],
[0, 0, 0, ..., 0, 0, 0]]) torch.Size([32, 8732])
pos: tensor([[0, 0, 0, ..., 1, 1, 1],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 1, 1, 0],
[0, 0, 0, ..., 0, 0, 0]], dtype=torch.uint8) torch.Size([32, 8732])
num_pos: tensor([[ 7], [64],[21],[53],[ 8],[ 2],[28],[ 8],[20],[66],[ 2], [14],[10],[11],[45],[12], [11],[ 8], [17],[ 9],[37],[24], [17], [43],[26], [11],[22], [10], [35],[14],[23],[33]]) torch.Size([32, 1])
# Localization Loss (Smooth L1)
Confidence Loss Including Positive and Negative Examples: 也就是equation(3).
pos_idx hard negative mining: 这里暂时先不讲,后期补充
# Compute max conf across batch for hard negative mining
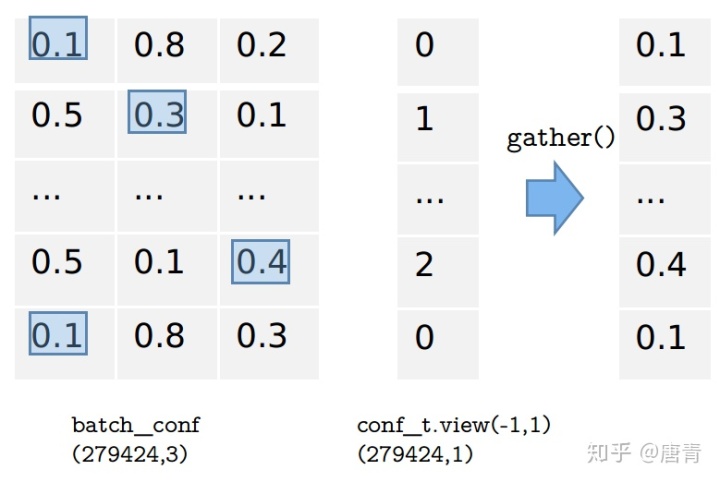
- 以下解释代码段“loss_c = log_sum_exp(batch_conf)- batch_conf.gather(1, conf_t.view(-1,1))”
其中, log_sum_exp(x):
(以下公式来自链接Tricks of the Trade: LogSumExp)
- softmax:
(1),如何计算softmax如公式(1)
- log(softmax)即为
-
- 把(3)套入(2)即
-
即代码“loss_c = log_sum_exp(batch_conf)- batch_conf.gather(1, conf_t.view(-1,1))”















 172
172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









