





只要一个安装博图软件的电脑,就可以做PID调节(需要装被控系统仿真块)
1.PID功能
PID功能用于对闭环过程进行控制(有反馈的)。PID控制适用于温度,压力,流量等物理量,是工业现场中应用最为广泛的一种控制方式,其原理是,对被控对象设定一个给定值,然后将实际值测量出来,并与给定值比较,将其差值送入PID控制器,PID控制器按照一定的运算规律,计算出结果,即为输出值,送到执行器进行调节,其中的P,I,D指的是比例,积分,微分,是一种闭环控制算法。通过这些参数,可以使被控对象追随给定值变化并使系统达到稳定,自动消除各种干扰对控制过程的影响。
有两种方式选择 PID 的指令版本
方式一
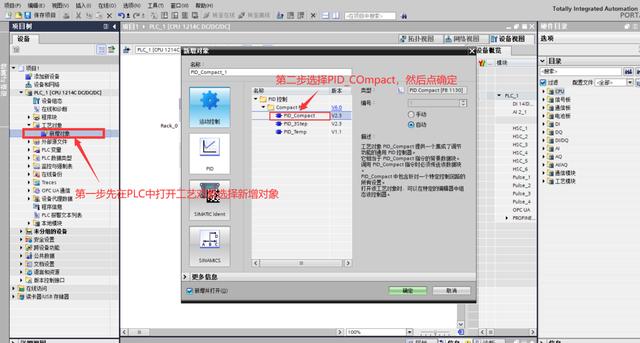
方式二

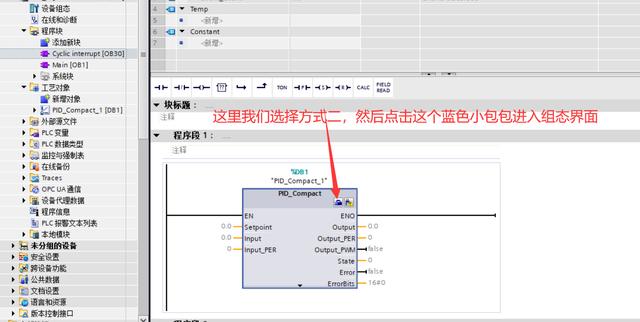
这里使用第二种方式
组态
1.

这里设置CPU启动后PID的模式
非活动:不运行PID调节
预调节:控制器初步自动寻找PID参数
精确调节:控制器精确自动寻找PID参数(先预调节才能精确调节)
手动模式:控制器按照预设值固定输出
自动模式:控制器根据PID参数调节被控对象。
如果控制器输出和反馈值成反比,勾选反转控制逻辑
2.
3.
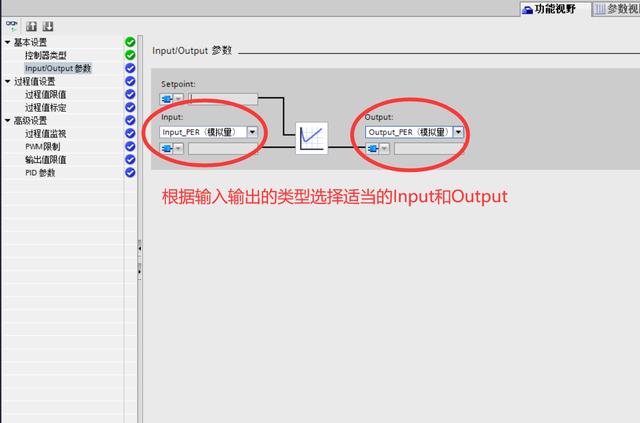
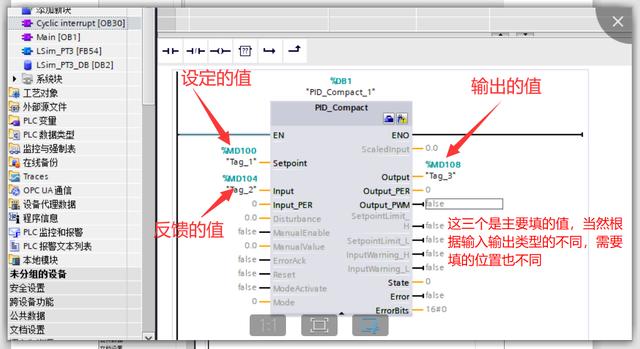
Input:已经转换的输入(一般填工程量)
Input_PER:没有转换的(一般填数字量)
4.
5.
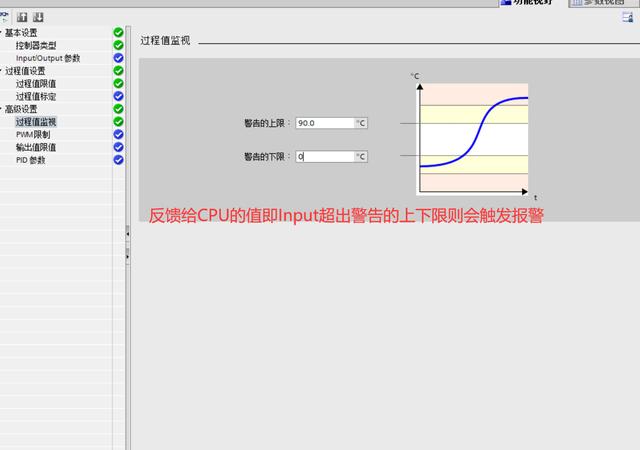
6.
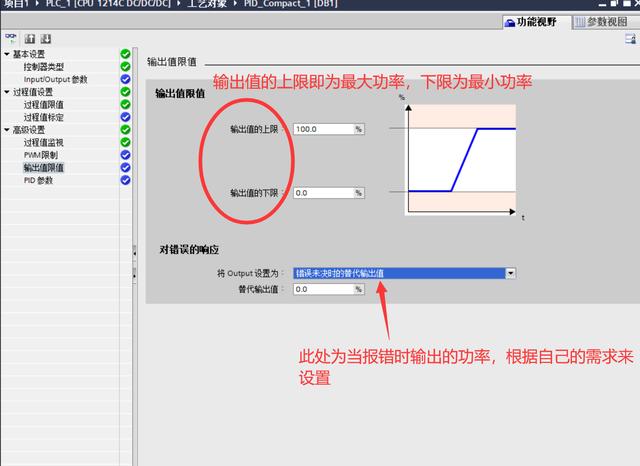
输出值的范围设定,在上限和下限范围内,用百分比表示
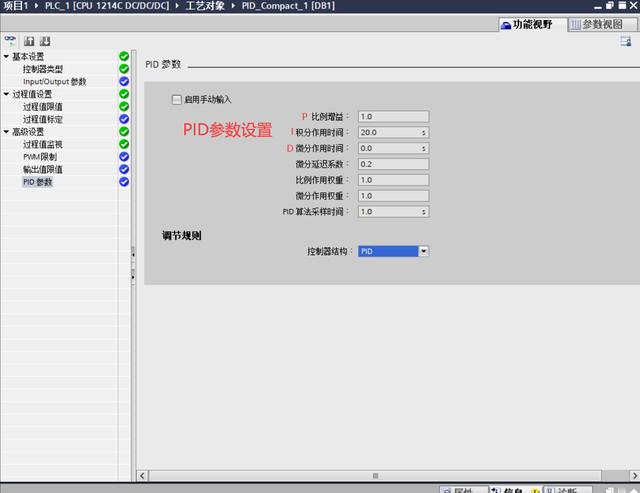
这里参数是PID默认参数,可通过勾选启用手动收入,改变参数
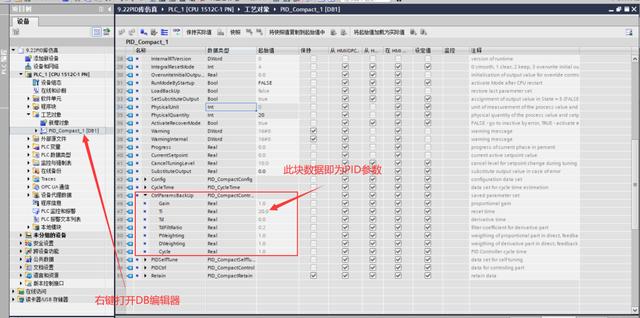
PID参数除了在组态里面修改还有以下方法
组态完成后调用PID块
1.
PID仿真只有1500才能使用,1200不可仿真
下来以被控系统仿真块(LSim_PT3)来做PID调节
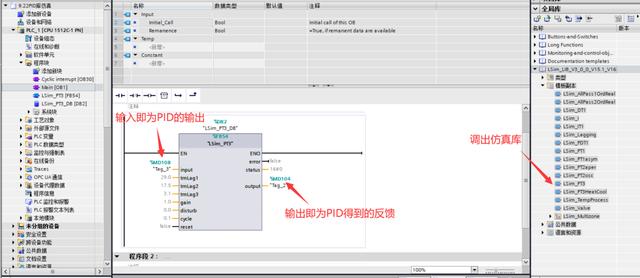
该块的算法

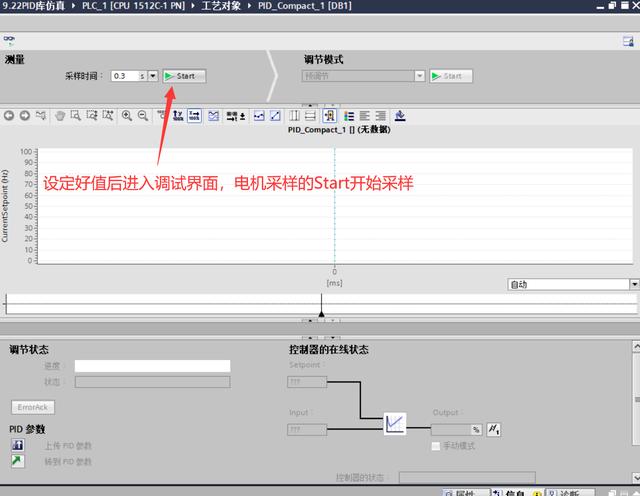
1. 打开PID调试
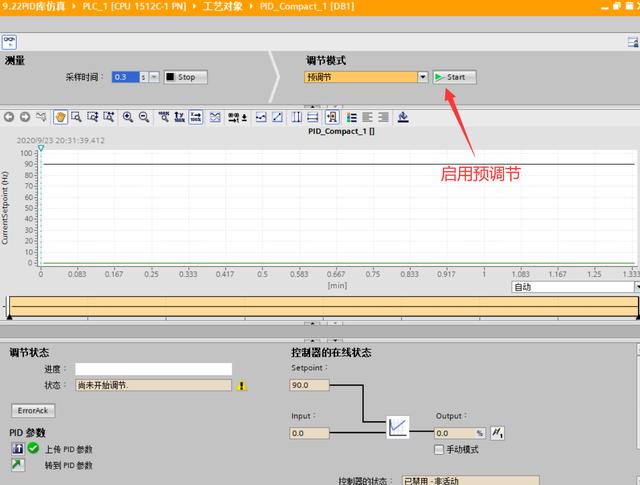
2.启动预调节(自动寻找PID参数)
设置好参数后,进入PID调试界面,点击开始采样
启动预调节的必要条件:
1.已在循环中断 OB 中调用 "PID_Compact" 指令。
2.ManualEnable = FALSE 且 Reset = FALSE
3.PID_Compact 处于下列模式之一:"未激活"、"手动模式"或"自动模式"。
4.设定值和过程值均处于组态的限值范围内。
5.| 设定值 – 过程值 | > 0.3 * | 过程值上限 – 过程值下限 |
6.| 设定值 – 反馈值 | > 0.5 * | 设定值 |
3.
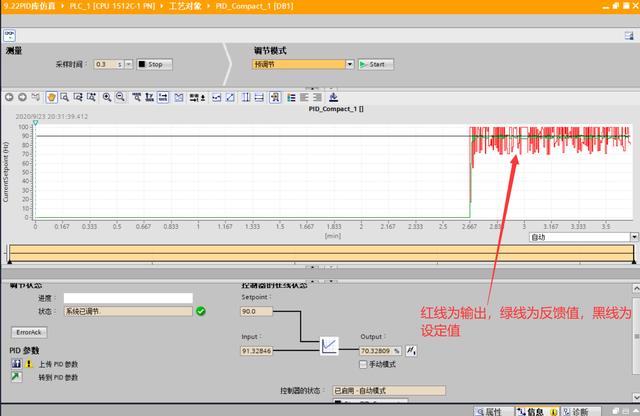
上传PID参数,是将新的PID参数上传为默认参数
转到PID参数,可以查看或者修改
PID参数
当调节完成后,状态栏显示系统已调节
可在进度栏查看调节的启动预调节的必bai要条件:
已在循环中断 OB 中调用 "PID_Compact" 指令。
ManualEnable = FALSE 且 Reset = FALSE
PID_Compact 处于下列模式之一:"未激活"、"手动模式"或"自动模式"。
设定值和过程值均处于组态的限值范围内。
| 设定值 – 过程值 | > 0.3 * | 过程值上限 – 过程值下限 |
| 设定值 – 反馈值 | > 0.5 * | 设定值 |进度
控制器在线状态:目前设定值 输入值 输出值
上传PID参数:是将新的PID参数上传为默认参数
转到PID参数,可以查看或者修改PID参数
控制器状态:当前PID模式 (勾选手动模式 启动手动模式 )
点击START PID_COMPACT按钮开始自动模式
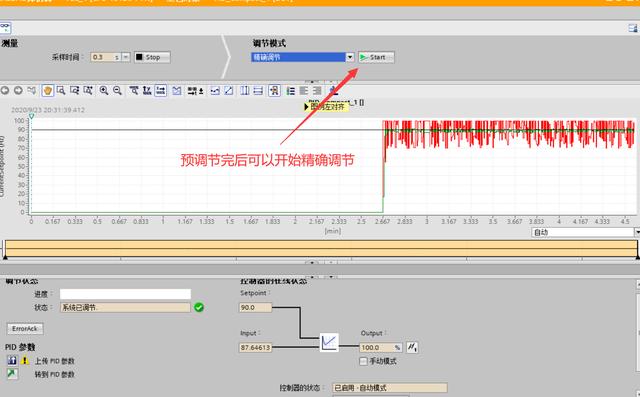
4. 在预调节结束后,可以开始精确调节
启动精确调节的必要条件:
1.已在循环中断 OB 中调用 "PID_Compact" 指令。
2.ManualEnable = FALSE 且 Reset = FALSE
3.PID_Compact 处于下列模式之一:"未激活"、"手动模式"或"自动模式"。
4.设定值和过程值均处于组态的限值范围内。
5.| 设定值 – 过程值 | < 0.3 * | 过程值上限 – 过程值下限 |















 4444
4444











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









