






 本文详细介绍了iRobot的扫地机器人Roomba961和擦地机器人Braavajet241的使用体验。Roomba961具备智能路线规划和强大的吸尘能力,能轻松清扫家中各个角落。Braavajet241则采用独立的拖地设计,方形机身能更好地清洁边角,前置喷水设计确保均匀清洁。两者分离式设计避免了扫地拖地一体机的常见问题,提供了更专业且高效的清洁解决方案。通过手机APP,用户可以远程控制并监控清洁过程,提升生活便利性。
本文详细介绍了iRobot的扫地机器人Roomba961和擦地机器人Braavajet241的使用体验。Roomba961具备智能路线规划和强大的吸尘能力,能轻松清扫家中各个角落。Braavajet241则采用独立的拖地设计,方形机身能更好地清洁边角,前置喷水设计确保均匀清洁。两者分离式设计避免了扫地拖地一体机的常见问题,提供了更专业且高效的清洁解决方案。通过手机APP,用户可以远程控制并监控清洁过程,提升生活便利性。
经过这些年技术的发展和进步,扫地清洁机器人已经逐渐被大众接受。很多人认为这是懒人的福利,我并不这么认为,正因为勤奋的你不需要花费更多精力在某件重复性繁杂性的活动内容上,而把时间用在其他更有创造性有意义的方面,是一种理念的进步。iRobot作为知名清洁机器人品牌,更是把市面上的消费需求痛点研究了个透,推出了扫拖分离式的清洁机器人套装,如果你好奇,那下面就一起来看看吧。

本次收到的是清扫套装,分为iRobot Roomba 961扫地机器人和Braava jet 241喷水擦地机器人。和大多数读者一样,我一开始也是有些困惑的,毕竟市面上带有扫地拖地一体功能的扫地机器人的设计理念已经深入人心,而iRobot却把两者分开设计,啥原因?
仔细想了一下这种设计,其实还是有它符合大众家庭实际需求的。首先,扫地机器人因为要照顾到机身体积和重量以及电池容量,集尘盒要尽量做到最大;其次,扫地机器人大部分是吸入式原理,如果地面本身有灰尘,湿抹布擦地的时候很容易在地面上留下黑泥越擦越脏,还因为水箱可能漏水弄湿扫地机人内部电路造成短路腐蚀,有安全隐患。
iRobot的这种分离式设计好处根据以上因素来说就很明显了,第一,独立的拖地机器人设计可以有充足的水箱设计,让Braava jet 241只做喷水擦地,更卫生也更专业;第二,拖地机做成方形设计,可以沿着墙壁、地线等边缘位置做清洁,不留死角;第三,前置喷水设计科学合理,先湿润地面,然后再进行来回擦地清洁,是地面更均匀干净,而不是传统的设计只让抹布打湿然后一拖而过。

我们先来看iRobot Roomba 961这款吸尘机器人,它的外形和功能都十分主流,圆形的机身,高度适中,可以轻松通过大多数沙发和床底,能够清扫到平常不容易清洁到的地方。顶部为三个实体按键,前面凸起的一个地方是RCON传感器以及一个提手。机身正中央是iAdapt区域摄像头,机身四周和底部也分布了大量传感器,起到躲避障碍、感知台阶等等时机情况。

在自动充电方面,iRobot Roomba 961设计了一个充电桩,扫地机器人通过机身的传感器可以在清洁完毕或者即将没电了的情况下自动走到充电桩进行充电。比如我每次上班出门前给iRobot Roomba 961下达“清洁”的命令即可,之后它会自动把家里地面清扫完毕后回到充电桩等待下一次指令,非常省心又十分智能。
此外,它还标配了一个虚拟墙,当虚拟墙启用时,机器人在工作的时候就不会越过虚拟墙的位置,这样就可以避免碰撞到一些易碎的物品或者不对特定区域进行清扫作业,比如家里有容易倾倒的工艺品,或者宠物的食盆,可以避免扫地机器人对其造成不必要的干扰。

iRobot Roomba 961自带扬声器,在和手机进行WiFi配对的时候全程都有中文语音提示,用起来也很方便。而如果遇到特定的故障,还会语音进行播报,比如提示“故障17”,经过查询说明书可以知道是集尘盒已满。

来进行实际清扫体验,因为iRobot Roomba 961底部有一个悬浮式轮胎,即使家里有比如过门石、地毯等也可以轻松越过高达2cm的障碍,而至于桌子底部、沙发底下这些平常我们不太注意也不容易清洁到的地方,其实时间一长厘米的灰尘杂物就会非常多,特别是北方风沙大的地方,甚至一天不清洁地面就会积一层灰,用到iRobot Roomba 961就会显得非常轻松了。

上图:iRobot Roomba 961扫地机器人可以轻松“钻”入沙发底部清洁。

再一个核心卖点就是它的线路规划功能了。前面提到过在机身中间有一个透明窗样子的iAdapt区域摄像头,其实它就起到了情景规划算法的作用,可以根据多种模式智能切换技术会针对家庭中的不同场景作出决策,比如当机器人清扫墙边和角落等地方的灰尘时,会自动切换至边角清洁模式,而碰到一些地上的电线和其它线缆时也能够通过防缠绕模式避免缠绕,在碰到污垢较多的区域时,Roomba 961也会探测到该区域的污垢对其进行重点清理,官方宣称它可以达到每秒超过60次决策,这也就是Roomba 961的一个核心竞争力所在。

连入手机APP的截图,更多的图示化展示非常高效清晰。
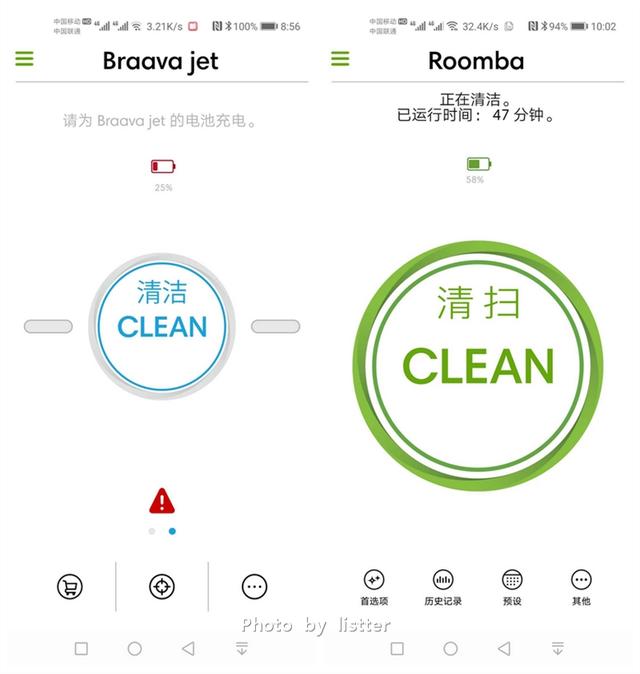
如果集尘盒满了,APP也会显示警示提示

当果你连入手机APP绑定并且进行了一次完整的室内清洁后,还会发现手机APP里自动生成了一份室内地图,这就用到了vSLAM视觉运算处理技术,通过机身自带的摄像头创建可视化地标,这样就能够让机器人自动判断哪些区域是已经清扫了,哪些区域并没有清扫。

在体验完iRobot Roomba 961扫地机器人的功能后,就是它的“伙伴”Brava jet 241喷水擦地机器人发挥作用的时候了。这个家伙个头比前者要小了好几圈,方正的造型十分小巧,机身顶盖只有一个按键,还有一个可折叠式的提手,方便搬运。

Brava jet 241喷水擦地机器人采用了电池分离式充电设计,我认为这个设计是充分考虑到了安全性,因为机身内部有水箱,为了用电安全而没有采用直接连有线的方式充电,机身侧面扣下电池再用充电桩来单独充电,使用起来也十分方便。


翻到机身背面,可以看到底部则是清洁垫、正面防跌落感应器、轮子、背面悬崖感应器等,同时它还配备了三种不同的细纤维抹布,机器人将会自动感应不同的抹布设置不同的清洁模式,包括湿擦、湿抹、干擦这三种,分别适用于实木、瓷砖、大理石地板等地面。
擦地的过程就是机器人首先会喷水进行三次往复清洁地板,同时还会震动机身用以清洁顽固污渍。而湿抹则是像日常拖地一样,单次清洁路径,适合清洁木地板表面的灰尘。干擦则是用于清理毛发和灰尘,不需要喷水。


打开隐藏的提手,可以看到擦地机器人的水箱开关

Braava jet 241喷水擦地机器人的几种擦地模式

可以看到,喷水机器人首先用传感器探测前方是否有障碍物,如果确认是地面才会通过前面的喷水口往地面喷水,然后再利用机身底部的擦地斤进行清洁作业。

Braava jet 241喷水擦地机器人搭载了iAdapt 2.0导航系统,将会自动绘制一个“隐藏地图”,当碰到障碍物时,机器人会绕开障碍物然后继续清洁,因为采用前置喷水设计,机器人还会自动避开家具和墙壁,确保前方的地面是空旷的才会喷水,这样能够有效避免对墙壁和家居造成损坏。甚至几面有插排的时候也可以有效避免被喷到水。
最后体验总结,在深度体验这两款产品之后,我认为iRobot坚持做扫地、擦地分离的理念还是值得推崇的,因为两者可以做到术业有关工,而且两者不需要互相妥协,可以各尽其职,让清洁地板和湿擦地板两者都做到更加完美。同时,手机APP的加入也可以让两种清洁方式都实现手机远程操控,因为不少人(也包括我)经常无法忍受扫地机器人产生的噪音(实际上iRobot Roomba 961扫地机器人的运行噪音算是我测评过的最安静的一款了),所以我可以不在家的时候就让扫地机器人和拖地机器人工作,到家后已经干净了,让科技改变生活方式,其实就这么简单。

















 1649
1649

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









