





迄今为止,看到的函数中,卷积的操作发生在OpenCV函数的内部。理论上,图像卷积就是将内核与图像覆盖区域对应位置相乘之后求和。从调用函数上来看,它需要一个数组参数来描述内核。在实践层面,有一个重要的微妙因素会对结果产生重大影响。微妙之处在于一些内核是可分离的,而另一些则不是。
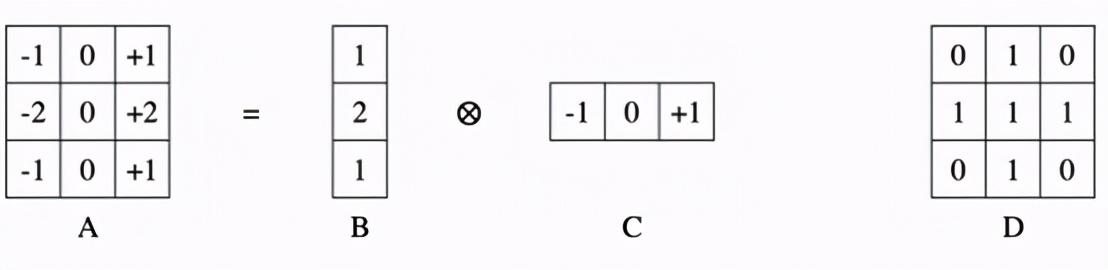
图1
图1(A)是可分离的; 它可以表示为两个一维卷积(B和C);D是一个不可分割内核的例子。可分离的内核是可以被认为是两个一维内核的内核,首先与x内核进行卷积然后与y内核进行卷积来应用。这种分解的好处是内核卷积的计算成本大约是图像面积乘以内核区域。这意味着用n×n内核卷积区域A的图像需要时间与An2成正比,同时n×1内核与图像卷积一次,然后与1×n内核卷积占用与An + An = 2An成比例。即使n小于3也有好处,随着n的增长,优势更为突出。
1、 利用filter2D()滤波
鉴于图像卷积所需的操作次数,是图像中像素的数量乘以内核中的像素数,这可能需要很多计算,因此,在这种情况下,最好让OpenCV来帮你完成并利用内部优化。OpenCV完成这些操作的函数是filter2D():
cv::filter2D(
cv::InputArray src,
cv::OutputArray dst,
int ddepth,
cv::InputArray kernel,
cv::Point anchor = cv::Point(-1,-1),
double delta = 0,
int borderType = cv::BORDER_DEFAULT
);
创建一个适当大小的数组,并用滤波器的系数填充它,然后将它与源图像和目标图像一起传递到filter2D()中。可以使用ddepth指定结果图像的深度,使用锚点指定滤波的锚点,使用borderType指定边界类型。如果定义了锚点,则内核可以是偶数大小;否则,它应该是奇数大小。如果要在应用滤波器后将总体偏移应用于结果,则可以使用参数delta。
2、 利用sepFilter2D分离滤波器
在内核可分离的情况下,通过以分离的形式表示并将这些一维内核传递给OpenCV,将从OpenCV获得最佳性能。sepFilter2D()与filter2D()类似,除了它期望这两个一维内核而不是一个二维内核。
cv::sepFilter2D(
cv::InputArray src,
cv::OutputArray dst,
int ddepth,
cv::InputArray rowKernel,
cv::InputArray columnKernel,
cv::Point anchor = cv::Point(-1,-1),
double delta = 0,
int borderType = cv::BORDER_DEFAULT
);
sepFilter2D()的所有参数都与cv :: filter2D()的参数相同,但使用rowKernel和columnKernel参数替换内核参数除外。后者为n1×1和1×n2阵列,n1不一定等于n2。
3、构建内核
getDerivKernel()构造Sobel和Scharr内核,getGaussianKernel()构造高斯内核。
void cv::getDerivKernels(
cv::OutputArray kx,
cv::OutputArray ky,
int dx,
int dy,
int ksize,
bool normalize = true,
int ktype = CV_32F
);
getDerivKernel()的结果放置在kx和ky参数中。内核(Sobel和Scharr)是可分离的内核,将返回两个数组,一个是1×ksize(行系数,kx),另一个是ksize×1(列系数,ky)。这些是从x和y导数阶dx和dy计算而来的。衍生内核总是方形的,因此大小参数ksize是一个整数。ksize可以是1,3,5,7或cv ::SCHARR中的任何一个。normalize参数告诉getDerivKernels()是否应该对内核元素进行归一化。对于在浮点图像上操作的情况,将normalize设置为true,但是当正在操作整数数组时,通常更为明智的做法是,在一些数组之前不对数组进行归一化,这样就不会丢掉以后需要的精度。最后一个参数ktype表示滤波器系数的类型。 ktype的值可以是CV_32F或CV_64F。
高斯滤波器的实际内核数组由getGaussianKernel()生成。
cv::Mat cv::getGaussianKernel(
int ksize, // Kernel size
double sigma, // Gaussian half-width
int ktype = CV_32F // Type for filter coefficients
);
与派生内核一样,高斯内核是可分离的。因此,getGaussianKernel()只计算一个ksize×1的系数数组。ksize的值可以是任何奇数正数。参数sigma设置近似高斯分布的标准偏差。根据以下函数从sigma计算系数:

也就是说,计算系数α使得滤波器整体被归一化。可以将其设置为-1,在这种情况下,将根据ksize大小自动计算σ值。在这种情况下,
例1是具体的使用方法,从中能看出构造的每个卷积核的用途吗?
例1:filter2D、sepFilter2D、getDerivKernels、getGaussianKernel功能演示。
#include #include using namespace std;using namespace cv;int main(int argc, char** argv){ Mat src = imread("E:/ img.bmp", 1); namedWindow("原始噪声图像", 0); imshow("原始噪声图像", src); //构造滤波器 Mat kernal = Mat::ones(3, 3, CV_32FC1); kernal/= 9; Mat filterDst; filter2D(src, filterDst, src.depth(), kernal); namedWindow("filter2D结果1", 0); imshow("filter2D结果1", filterDst); Mat kernal2 = (Mat_(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); Mat dst1; filter2D(filterDst, dst1, src.depth(), kernal2); namedWindow("filter2D结果2", 0); imshow("filter2D结果2", dst1); Mat kx = (Mat_(1, 3) << 0, -1, 0); Mat ky = (Mat_(1, 3) << -1, 0, -1); sepFilter2D(filterDst, dst1, src.depth(), kx, ky);// , Point(-1, -1), 0, BORDER_DEFAULT); namedWindow("sepFilter2D结果", 0); imshow("sepFilter2D结果", dst1); getDerivKernels(kx, ky, 1, 1, 3, true); cout << kx << endl; cout << ky << endl; Mat dst2; sepFilter2D(filterDst, dst2, src.depth(), kx, ky);// , Point(-1, -1), 0, BORDER_DEFAULT); cv::normalize(dst2, dst2, 0, 255, NORM_MINMAX, CV_8UC1); namedWindow("sepFilter2D结果2", 0); imshow("sepFilter2D结果2", dst2); Mat gaussKernal; gaussKernal = getGaussianKernel(7, -1); filter2D(src, filterDst, src.depth(), gaussKernal); namedWindow("Filter2D结果3", 0); imshow("Filter2D结果3", filterDst); waitKey(0); return 0;}
图2 操作结果示意图















 790
790











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









