






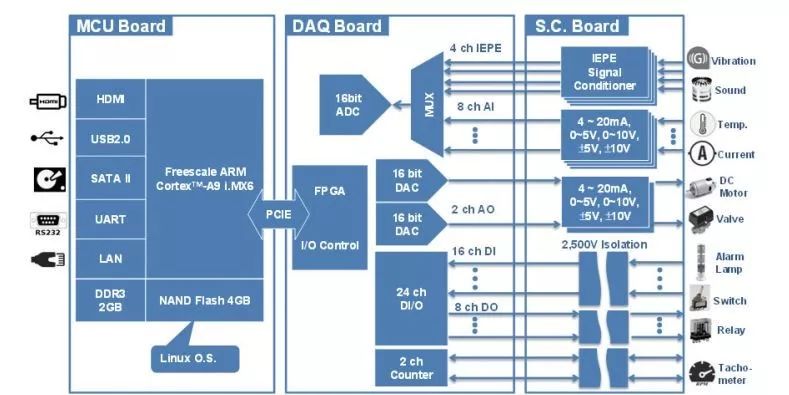
MIC-1816R嵌入式ARM测控一体机采用ARM Cortex-A9 i.MX6处理器,支持Ubuntu操作系统,提供Qt和C开发包、示例程序,集成4通道IEPE加速规信号采集、8通道电压电流采集、模拟输出和数字IO等,具有极高性价比,是设备状态监测和工业测控的首选方案。

- ARM Cortex-A9 i.MX6,1GHz
- 1MS/s 采样率(Total)
- 4通道IEPE信号输入,增益= 1/10/100
- 8 通道模拟输入,电压 或 4 ~20mA
- 2通道模拟输出,3 MS / s,16位分辨率
- 16通道隔离数字输入和8通道隔离数字输出
- 2 x 32 位可编程 counter/timers
- 2 x RS-232,2 x CAN BUS 端口
- 1 x 10/100/1000 Base-T RJ-45 LAN 端口
- 1 x USB 2.0 和 1 x OTG USB 2.0
- 极低功耗
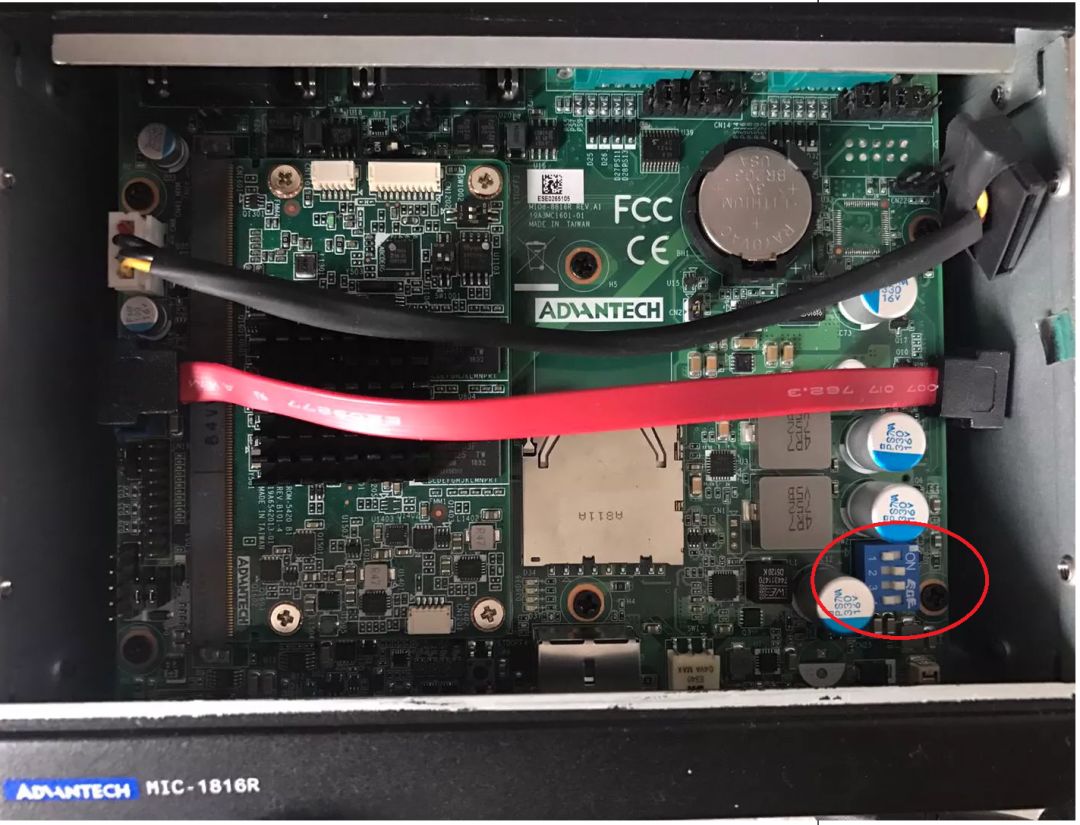
MIC-1816R支持两种操作系统,通过SW2拨码开关进行切换:
1、嵌入式Linux Yotco:安装在内置EMMC上。开机可直接启动。预装采集卡C语言驱动和例程,C编译器;
2、嵌入式Ubuntu:需要另外烧录到SD卡上,预装采集卡C语言、Qt语言驱动和例程,C编译器和Qt Creator。
操作系统切换
1、内置EMMC卡启动Yotco:SW2拨码开关->1-on,2-3-4-off ;
2、SD启动Ubuntu:SW2拨码开关->1-off,2-3-on,4-off。
SW2蓝色拨码开关位于下图SD卡插槽附近。
Ubuntu系统安装及Qt示例程序使用说明
一、安装盘准备
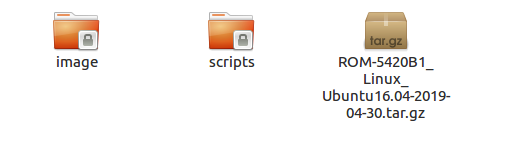
1、下载镜像文件文件名:ROM-5420B1_Linux_Ubuntu16.04-XXXXX.tar.gz(下载地址请在文末留言);
2、U盘方式:在Ubuntu或Linux下解压缩到空白U盘(ext4格式不可以是fat32),不能在windows下解压缩。
3、解压缩的指令: .tar.gz
tar zxvf FileName.tar.gz
4、目录方式:也可以直接解压缩到Linux系统下的目录中
出现的目录如下:
二、烧录Ubuntu到SD卡:
1、烧录到SD(SD容量必须>=8G),建议使用Ubuntu系统,按解压会有image和scripts两个目录。
2、烧录进入scripts目录,执行./mksd_recovery-linux.sh /dev/mmcblk1 (SD卡设备)等待脚本执行完毕后即可通过SD启动系统。
3、可以将SD卡通过USB转换器接入Linux系统,sudo su 切换到root身份,在Ubuntu中输入fdisk -l查看挂载设备,可看到除了本地硬盘sda之外,多出了sdc。
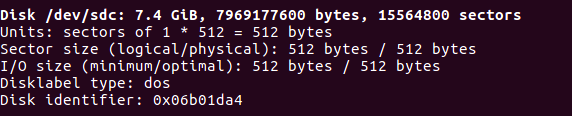
输入./mksd_recovery-linux.sh /dev/sdc。

安装完毕后再次使用fdisk -l,出现dev/sd1和dev/sd2。
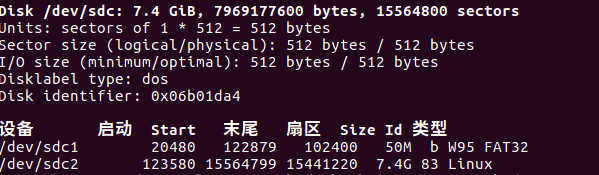
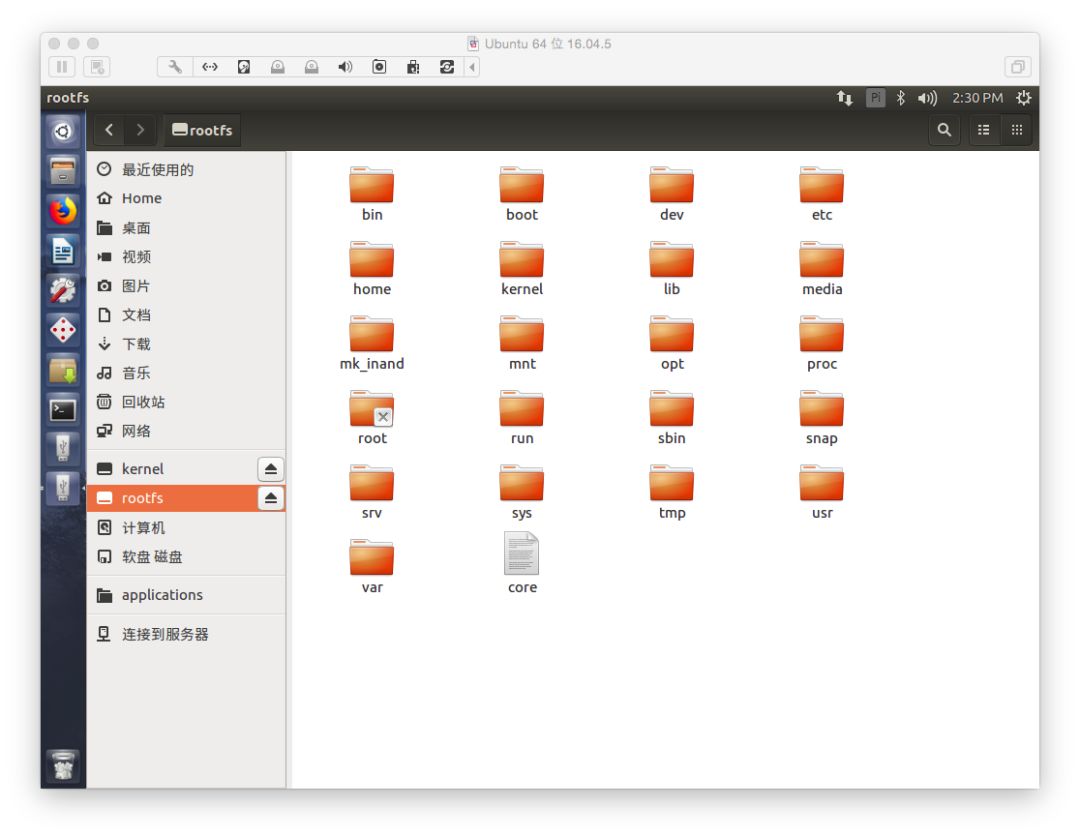
同时文件管理器中会看到SD卡出现Kernel和rootfs两个分区。
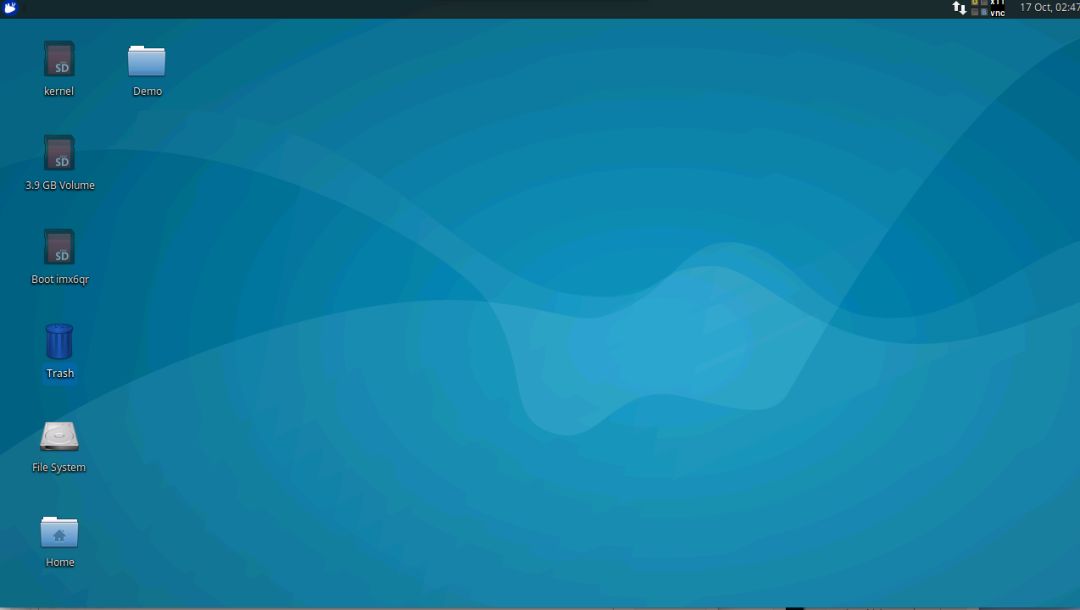
 三、将SD卡插入MIC-1816R插槽,启动后进入Ubuntu桌面。
三、将SD卡插入MIC-1816R插槽,启动后进入Ubuntu桌面。
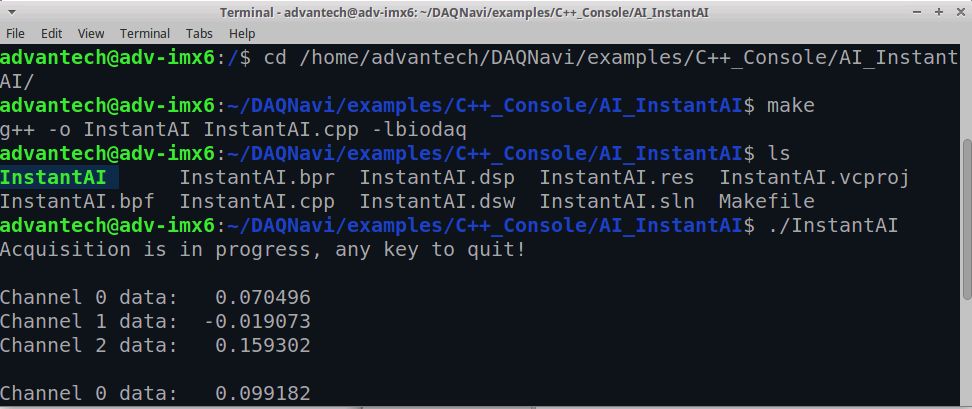
四、启动终端,进入C语言例子代码目录,使用make指令编译程序,运行(详细步骤参考“附录:Linux通用C语言示例程序使用说明”。
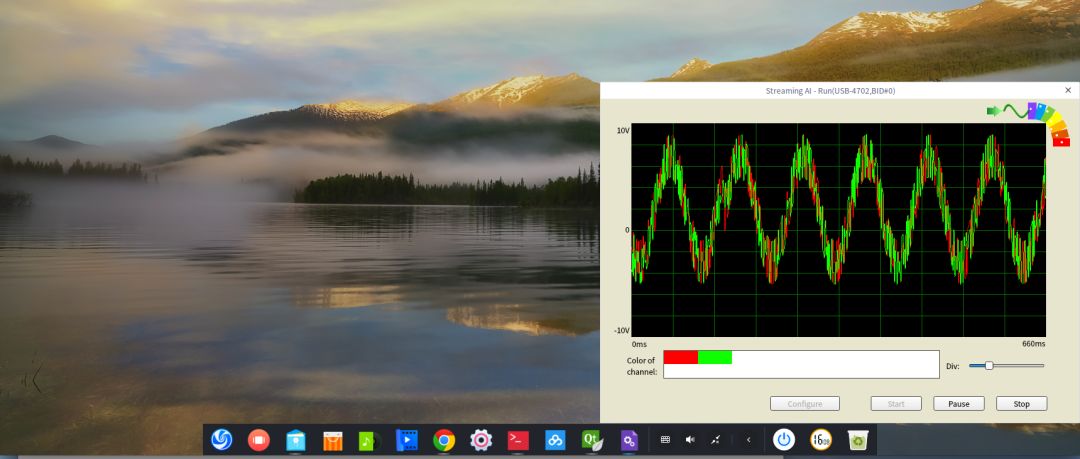
五、启动Qt,打开例子程序:
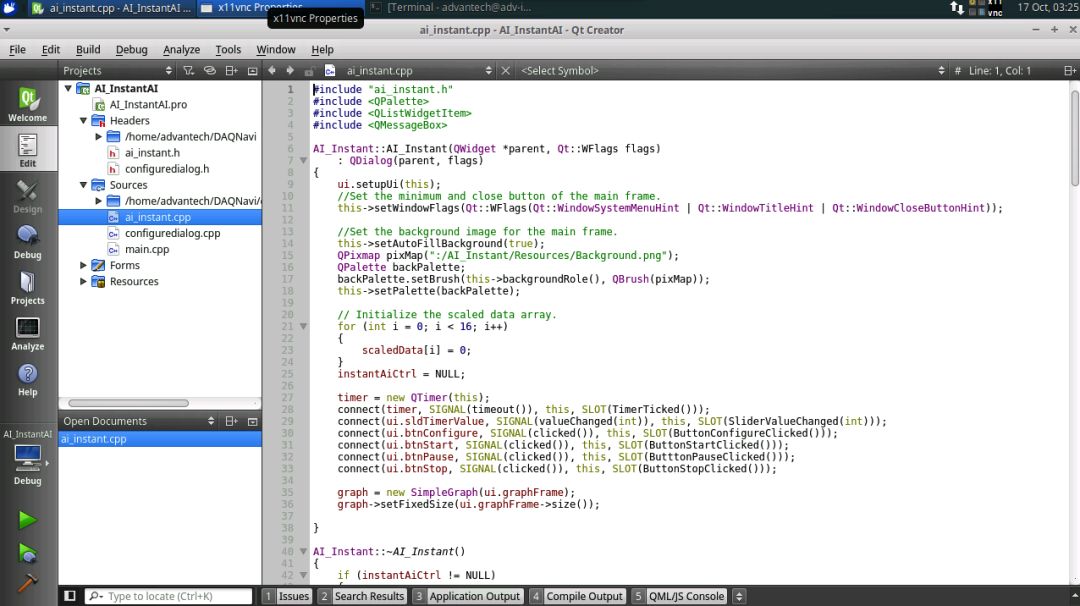
编译运行。
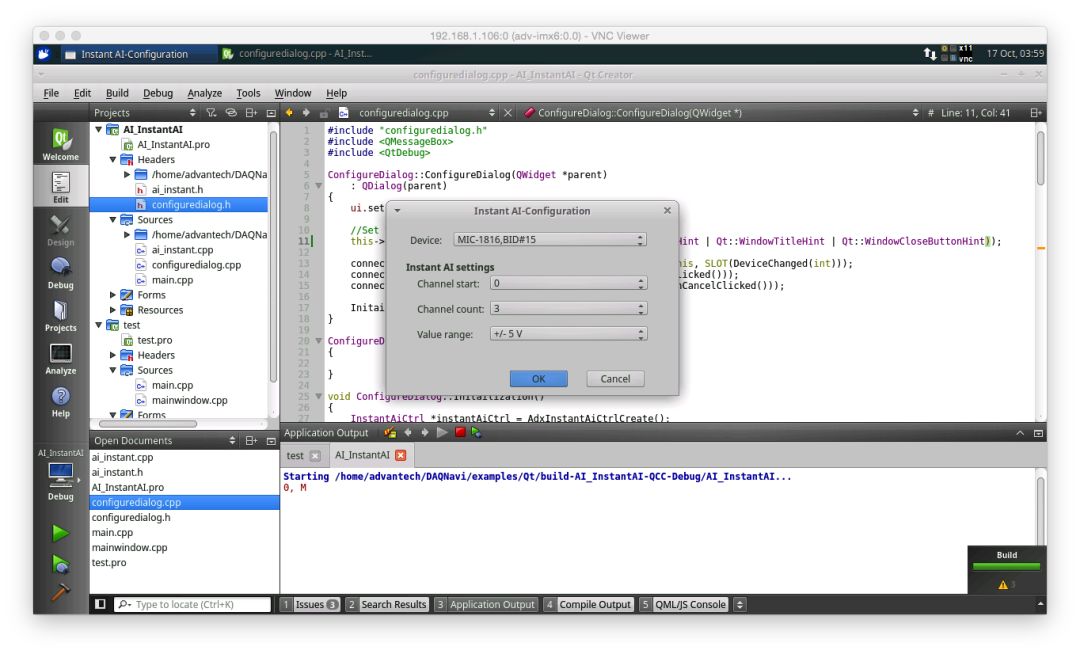
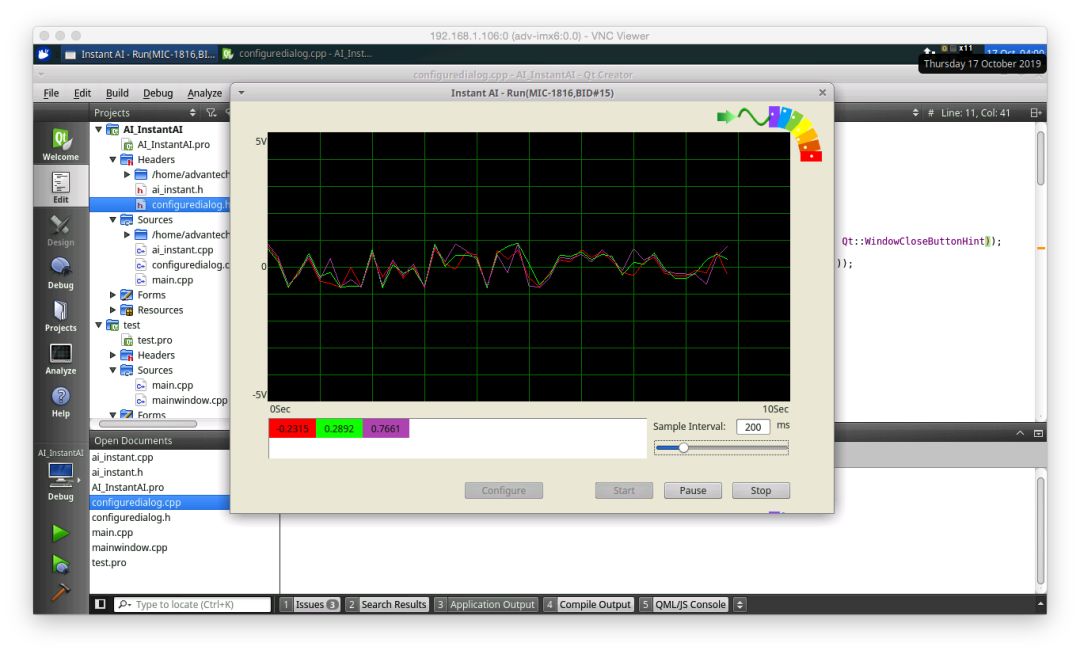
选择设备、起始通道、采集通道数和量程范围,按OK按钮,显示采集曲线。
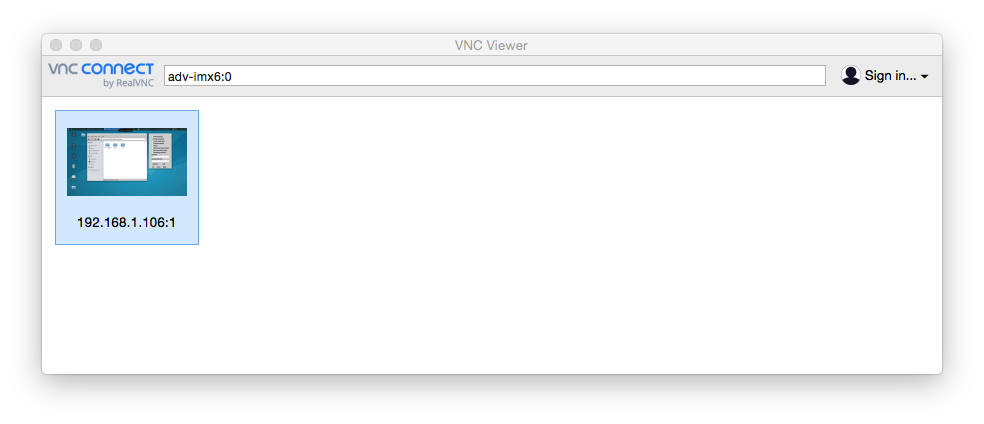
VNC远程桌面配置
程序开发既可以使用MIC-1816R直接开发,也可以通过内置的VNC服务器,通过远程客户端访问MIC-1816R远程桌面。
1、VNC服务器配置如下:
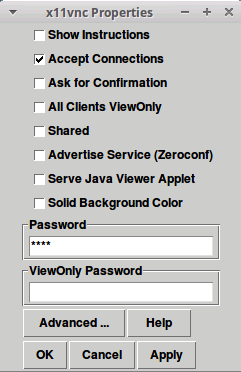
2、启动远程VNC客户端,键入IP地址进行连接。
3、启动远程调试
附录:Linux C语言示例程序使用说明
请在下面的所有步骤中使用ROOT权限,本以Ubuntu为例。
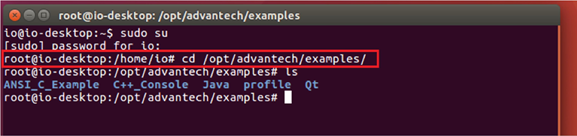
步骤1:C++示例源代码位置是“/opt/advantech/examples/C++_Console”。
> > cd /opt/advantech/examples/C++_Console
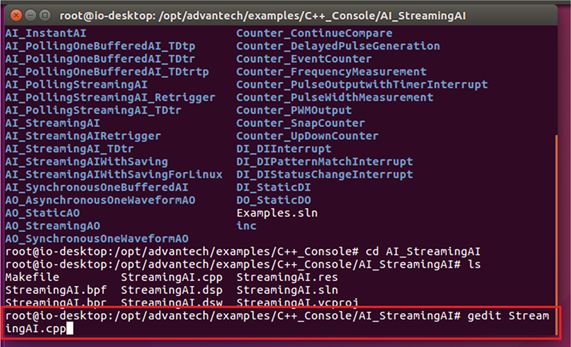
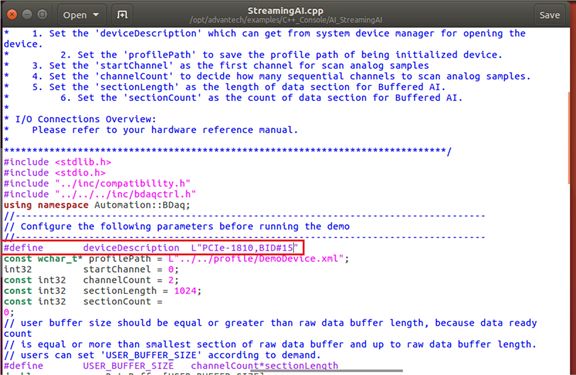
步骤2:在示例中修改“deviceDescription”参数。这里使用“gedit”,这是一个文本编辑器。
>> gedit(示例.cpp文件名)
 步骤3:在系统中获取设备描述,然后在示例中替换“deviceDescription”,如果需要更改采集功能,可修改其他初始参数或函数。
步骤3:在系统中获取设备描述,然后在示例中替换“deviceDescription”,如果需要更改采集功能,可修改其他初始参数或函数。
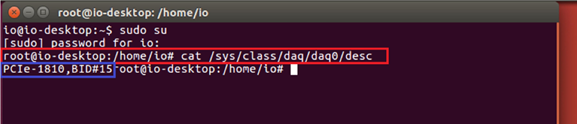
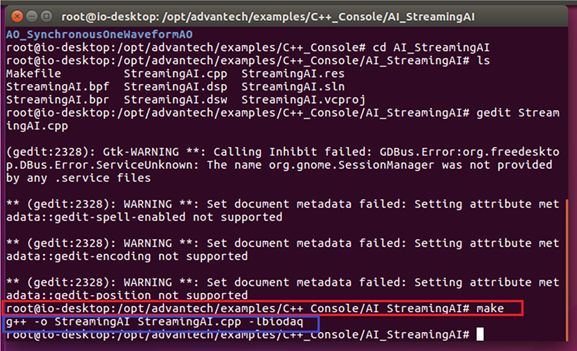
步骤4:编译例子程序。
>>make
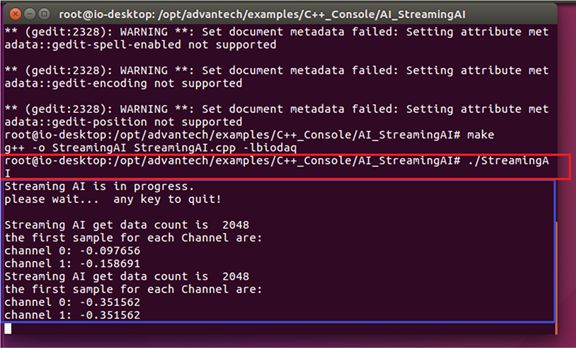
步骤5:运行例子程序
>>./( 例子名称)
步骤6:如果需要再次修改示例,请重复步骤3到步骤5
相关参考资料
十分钟学会Linux数据采集开发-Ubuntu/Deepin
基于Linux的水电站机组励磁装置监控运维系统
PMS||声音振动监测与分析解决方案
研华测试与测量解决方案2019金秋版
视频||十分钟学会LabVIEW数据采集应用开发


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









