







杨老师浅谈wedo2.0巡线小车

wedo2.0巡线小车
下面由杨老师浅谈一下wedo2.0巡线小车,本课程可作为老师进阶培训课程使用,如果有不对的地方请各位关注我公众号的大神们指教。
说到巡线小车我们一般都会想到使用EV3做巡线小车,其中有单光感巡线,双光感巡线,PID巡线等,之前也一直在学习和研究EV3巡线,今天来讲一下wedo巡线。
wedo2.0里传感器有倾斜传感器、运动传感器。我们本次用到的是运动传感器,一般情况下只要用来是识别物品,但不同的颜色识别的值则不一样,所以利用颜色来完成wedo巡线小车。
接下来通过我最近搭建和研究的模型来讲解一下wedo巡线小车。

模型一
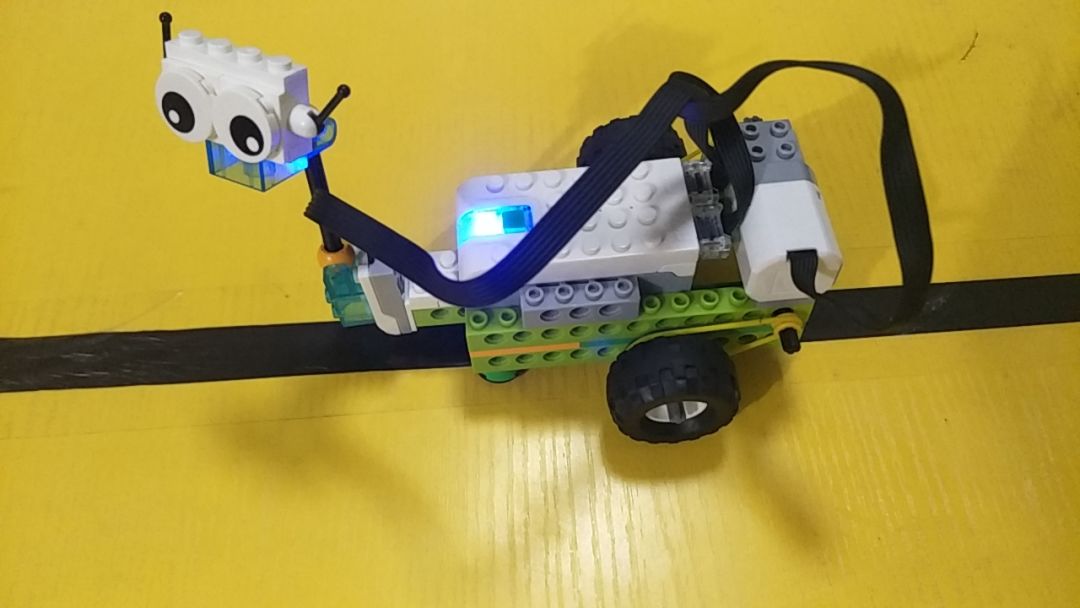
巡线小车1
原理:这巡线小车主要利用皮带传动。小齿轮带动大齿轮/大滑轮带动小滑轮左加速传动(同轴)小滑轮带动大滑轮作减速传动,利用转速不同完成巡线,如果识别到黑色则向左旋转,如果识别到黄色则向右旋转。
程序图:

细节图:

视频效果:

模型二

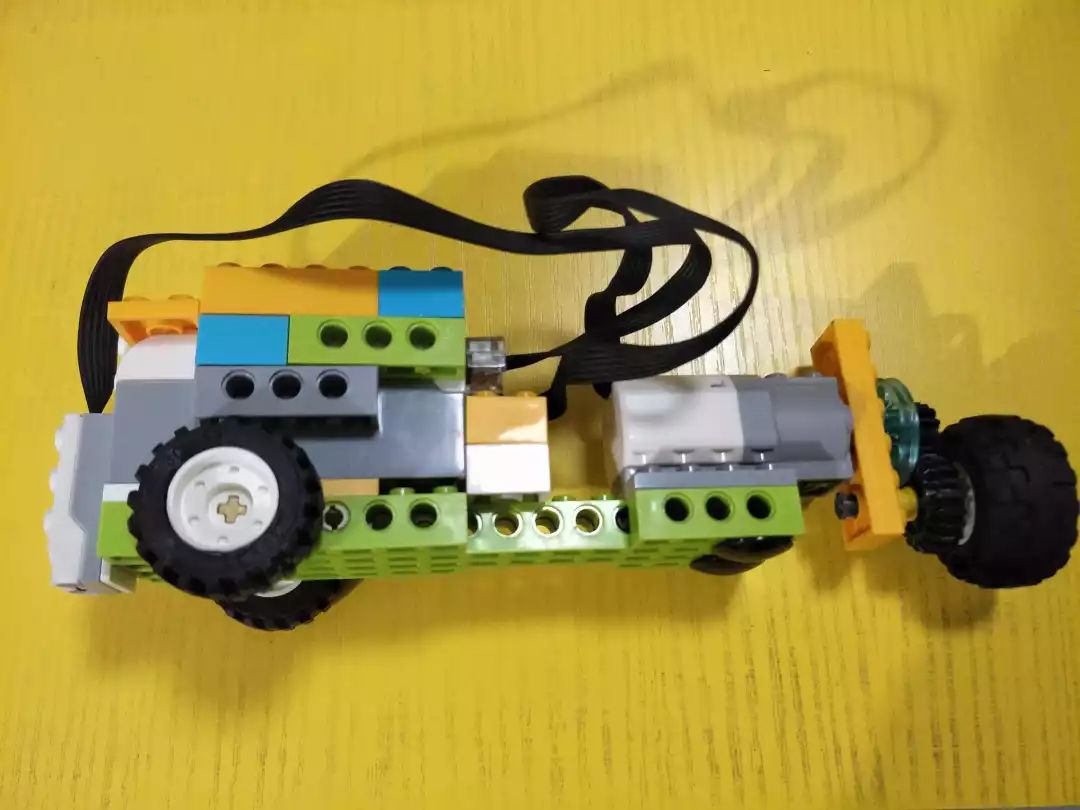
巡线小车2
原理:主要利用最后轮子的左右旋转,识别到黑色向右旋转,识别到黄色向左旋转,通过不断的左右钻转达到巡线的目的。
程序图:
细节图:
视频效果:
模型三
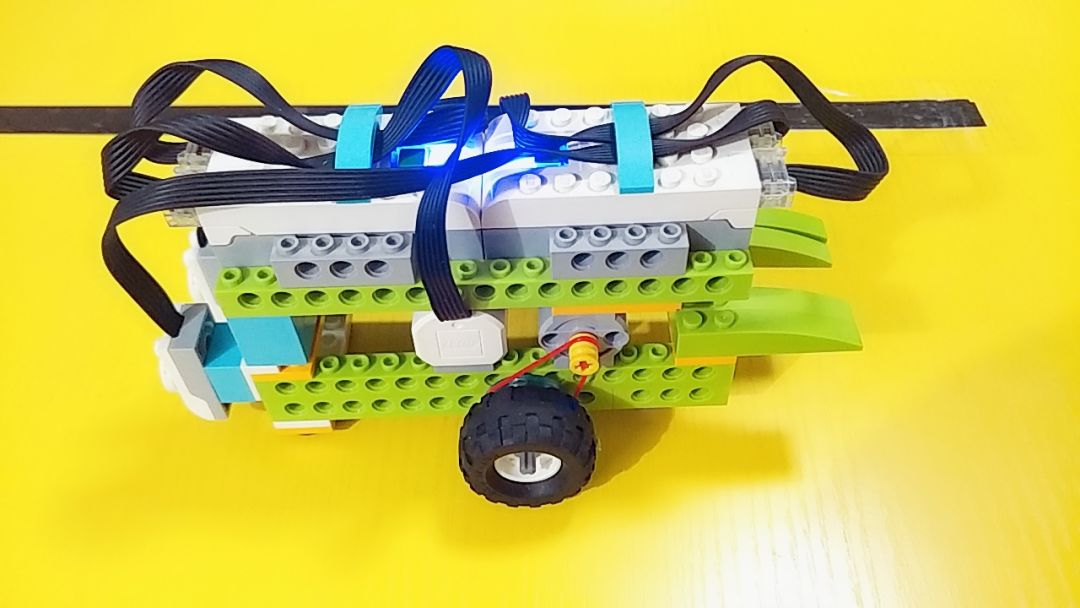
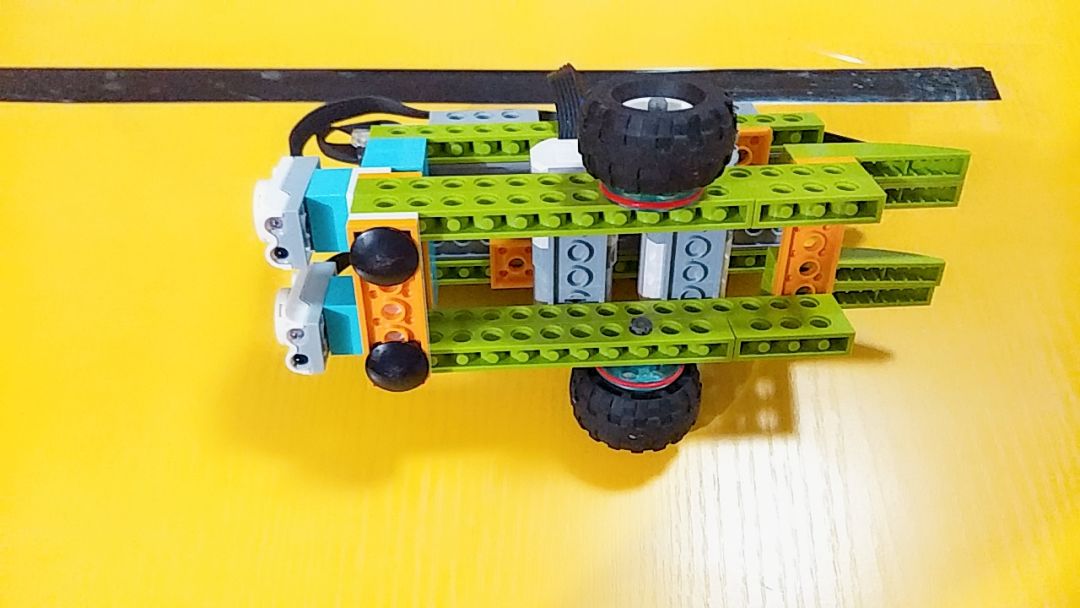
巡线小车3
原理:集线器1如果识别到黑线则向右旋转,集线器2如果识别到黑色则向左旋转,如果都没有识别到就前行。
程序图:这个程序就不公布啦,留下一个悬念, 各位老师或者小朋友自己多调试一下。
细节图:
视频效果:
、















 2567
2567











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









