







今天其实想聊一聊点云的配准的,但这个话题太大了,所以我决定拆分成几个分别讲,刚体变换是讲配准的储备知识。刚体变换是假设物体不会发生变形的旋转平移,不考虑扭曲拉伸等条件,简化了旋转平移的数学模型。
我们通常的配准,通俗的来讲,是将两片点云纳入到统一坐标系,无论是 align with(后一片点云配准到前一片坐标系)还是registration(全局配准),最终得到旋转平移参数是最终的目的,只是参数表达的方式不同,大致上有四元数,欧拉角,还有旋转矩阵三种表达方式,今天讲解后两种,四元数大多数人比较陌生,所以计划讲的多一点,另外写一篇文章。当然求解一次大概率没有很好的精度,大概率是需要进行迭代操作的。
欧拉角表示
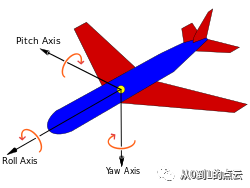
在摄影测量学中,我们习惯用偏摆(yaw,y轴旋转)、俯仰(pitch,x轴旋转),翻转(roll,z轴转动)来描述物体的姿态,加上平移和尺度因子参数,就是我们常用的布尔萨七参数,利用它,我们可以计算不同坐标系的变换。
求解七参数一般来说有三种方法
常规法:我们可以利用三个不在一个
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3228
3228











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









