






1、机器人坐标系管理的改进
 主要有以下改进:
主要有以下改进:
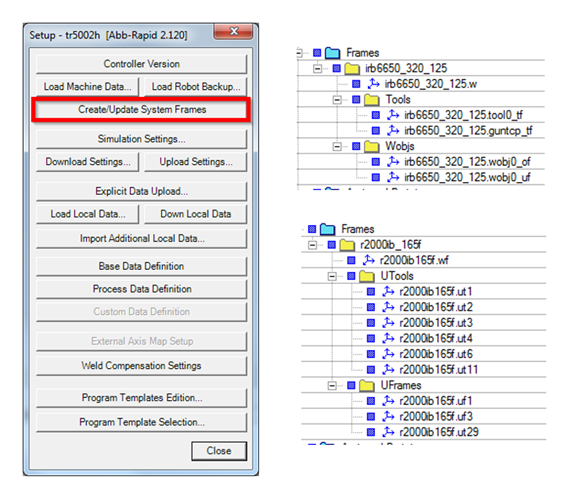
系统坐标系在对象树的文件夹结构下自动创建,拆分为"基本"和"工具"文件夹(每个机器人实例)
提高大型、复杂机器人仿真研究的可用性
根据控制器标准命名文件夹结构
支持所有 RCS
2、机器人控制器管理的改进
主要有以下改进:
增加新按钮("全部终止"),一次终止所有 RCS 连接
更轻松地检测 rrs.xml 问题:
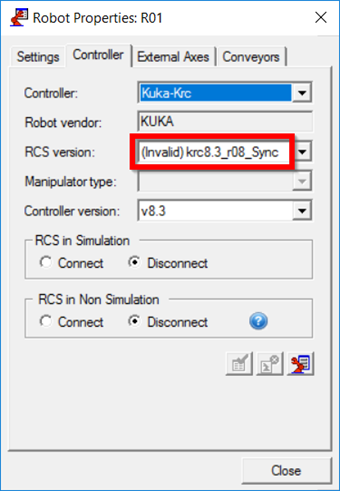
"缺少 RCS 版本"无效"指示
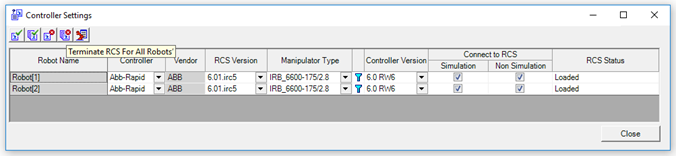
- 当已定义的 RCS 版本在加载的 rrs.xml 中不存在时,在"控制器设置"的 “RCS 版本”字段中,或"机器人属性"的“控制器”选项卡中,用户都可以看到"无效"指示前缀
3、紧急停机情况下的机器人行为仿真
主要有以下改进:
模拟紧急停机情况下的机器人行为
显示断电时所有可能的工具位置
需要 RCS 连接
支持对库卡KUKA机器人的仿真分析,即将支持FANUC机器人
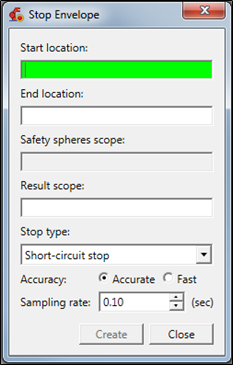
对具有最新RCS 版本的KUKA机器人,用户可以使用"急停扫动卷"(Stop Envelope)功能,图形化直观显示,机器人(或工具)在扫动卷的所有点和边缘。
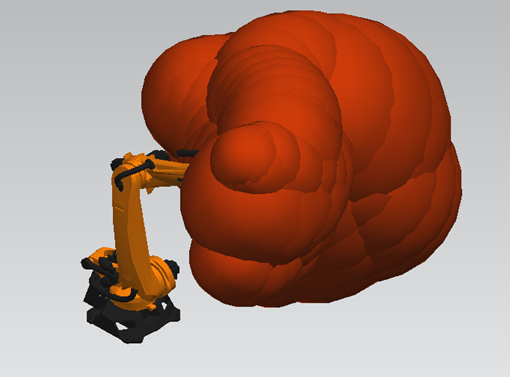
- 用户可以计算机器人运动突然停止时(例如,由于电源停止)或由于受控停止的情况的体积包络。
4、机器人各关节行程的实时显示
主要有以下功能:
在机器人查看器的"关节状态"面板中,动态显示仿真运行时,机器人各关节行程的已使用范围
显示上限和下限以及范围
用户可以自由切换显示的“打开或关闭 on\off”
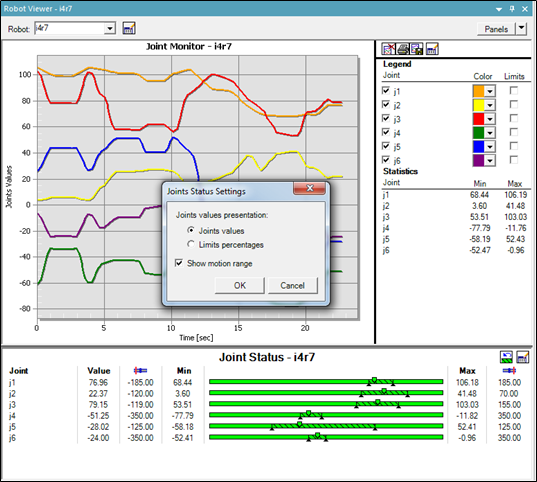 选择"显示运动范围"(Show motion range)选项,软件会叠加一个底带区域,图形化表示机器人各关节的行程范围,并可以黑色三角标记,放置在个关节行程范围极限值的图中。
此外,机器人各关节行程区域两侧的"最小"和"最大值"列,也会记录这些值。
选择"显示运动范围"(Show motion range)选项,软件会叠加一个底带区域,图形化表示机器人各关节的行程范围,并可以黑色三角标记,放置在个关节行程范围极限值的图中。
此外,机器人各关节行程区域两侧的"最小"和"最大值"列,也会记录这些值。
 声明:文章内容整理可能来自网络,如有侵权请联系沟通。本公众号所发表文章均代表作者个人对行业理解与思考总结,如有不妥,欢迎留言拍砖,我们将及时修正,您的建议是我们前进的动力。智能制造因你而进
步和前行!
长按二维码,添加公众号!
声明:文章内容整理可能来自网络,如有侵权请联系沟通。本公众号所发表文章均代表作者个人对行业理解与思考总结,如有不妥,欢迎留言拍砖,我们将及时修正,您的建议是我们前进的动力。智能制造因你而进
步和前行!
长按二维码,添加公众号!

共建、共享、共学、共融、共进、共赢














 974
974











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









