






 本文介绍了人工势场法的基本原理,包括引力势场和斥力势场的概念,以及梯度下降法的应用。通过MATLAB实现,展示了如何构建势场图并执行梯度下降法来规划机器人路径。同时,讨论了方法存在的问题,如局部极小值,并提出了改进策略。
本文介绍了人工势场法的基本原理,包括引力势场和斥力势场的概念,以及梯度下降法的应用。通过MATLAB实现,展示了如何构建势场图并执行梯度下降法来规划机器人路径。同时,讨论了方法存在的问题,如局部极小值,并提出了改进策略。
阅读本文需要的基础知识为:
- 理解机器人的构型空间。建议阅读:机器人运动规划中的C space怎样理解?为什么不直接在笛卡尔坐标系下运算呢?
本文的实现程序与使用说明见我的学习工具箱:小明工坊:【个人开源】机器人运动规划学习工具箱使用说明
基本原理
1.概述
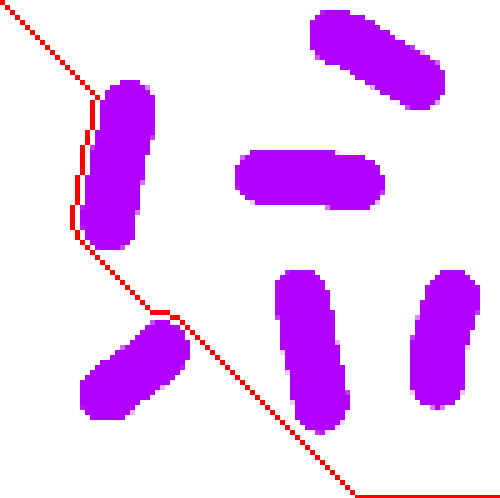
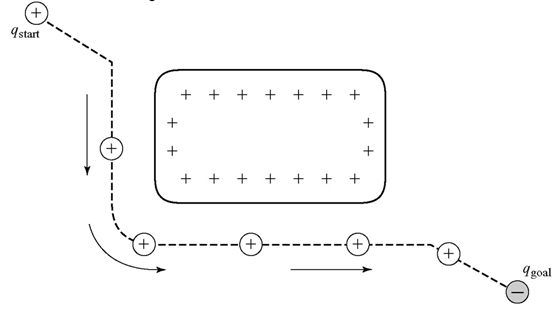
我们打两个比方来说明人工势场法的作用机理。首先,我们把构型空间比作一个电势场平面,机器人(的当前构型)比作空间中一点。如果让机器人的起点和障碍物带正电荷,终点带负电荷,机器人带正电荷。由于同性电荷相斥,异性电荷相吸的原理,机器人将会在电场力的作用下沿着某条路径向终点移动 ,并避开带正电荷的障碍物,如图1所示。
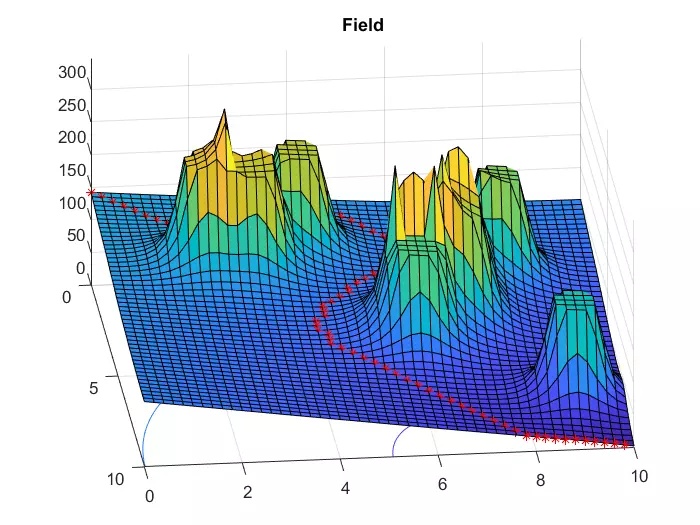
类似的,我们也可以把构型空间比作一个有起伏地形的区域。其中,起点和障碍物位于较高的区域,终点位于较低的区域,机器人视作一个球体。那么在重力的作用下,机器人将沿着某条轨迹从较高的起点滑落到较低的终点,并避开较高的障碍物。如图2[2]所示。
以上的两个例子其实就是电势场与重力势场的作用机制,电势场和重力势场都是自然势场。而人工势场法就是在已知起点、终点和障碍物位置的情况下,构建一个人工势场来模仿这种作用机制。人工势场法的优点在于,它其实是一种
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1818
1818











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









