





为什么can两头要加120Ω电阻,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线
CAN控制器是CAN的核心元件,它实现了CAN协议中数据链路层的全部功能,能够自动完成CAN协议的解析。CAN控制器一般有两种,一种是控制器IC(SJA1000),另一种是集成CAN控制器的MCU(LPC11C00)。
SJA1000上电后处于复位状态,必须初始化后才能工作。
(1)置位模式寄存器Bit0位进入复位模式;
(2)设置时钟分频寄存器选择时钟频率、CAN模式;
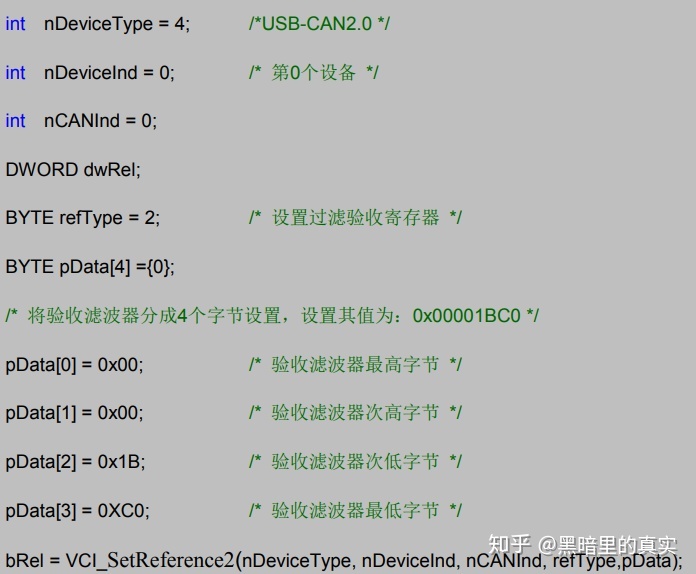
(3)设置验收滤波,设定验证码和屏蔽码;
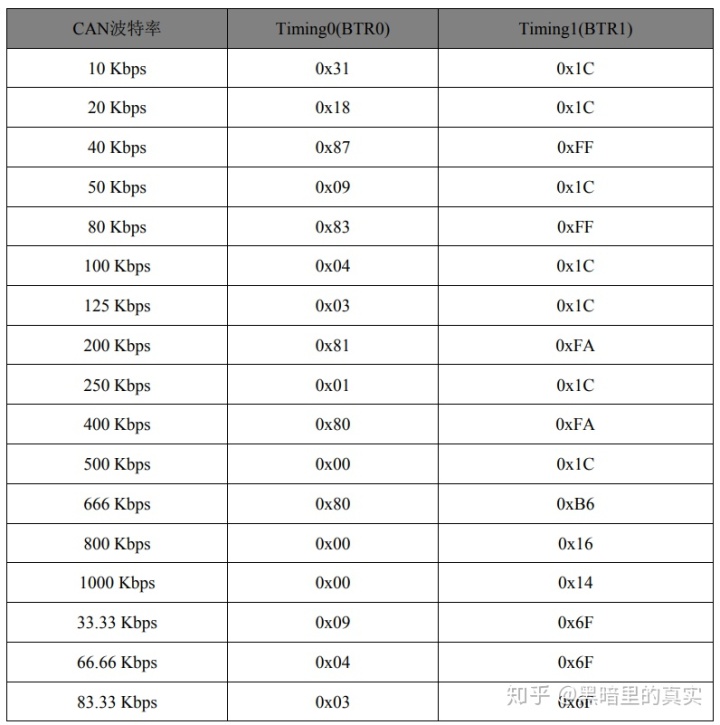
(4)设置总线定时器寄存器0、1设定CAN波特率;
(5)设置输出模式;
(6)清零模式寄存器Bit0位退出复位模式;
SJA1000可被视为外扩RAM,地址宽度8位,最多支持256个寄存器
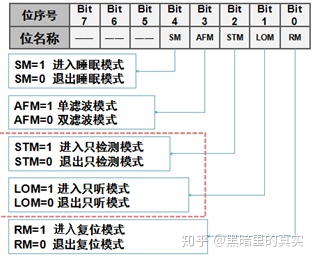
模式寄存器
CAN总线的滤波器设置
验收滤波器由验收代码寄存器 (ACRn)和验收屏蔽寄存器 AMRn 定义。
要接收的信息的位模式在验收代码寄存器中定义。
验收屏蔽寄存器定义验收代码寄存器的相应位对验收滤波器 是“相关的”或“无影响的” 。
在验收滤波器的帮助下 CAN 控制器能够允许 RXFIFO 只接收同识别码和验收滤波器中预设值相一致的信息。
复位请求位被置高, 验收代码寄存器 ACR可以访问 (读 /写),验收屏蔽寄存器 AMR 可以访问(读 /写)。
滤波的规则是:每一位验收屏蔽分别对应每一位验收代码,当该位验收屏蔽位为“1”的时候(即设为无关),接收的相应帧ID位无论是否和相应的验收代码位相同均会表示为接收;当验收屏蔽位为“0”的时候(即设为相关),只有相应的帧ID位和相应的验收代码位值相同的情况才会表示为接收。只有在所有的位都表示为接收的时候,CAN控制器才会接收该报文。
SJA1000验收滤波器由
4个验收码寄存器ACR0、ACR1、ACR2、ACR3
和 4个验收屏蔽寄存器AMR0、AMR1、AMR2、AMR3组成
这 8 个寄存器在 SJA1000的复位模式下设置
滤波的方式有两种,由模式寄存器中的AFM(MOD.3)位选择:
单滤波器模式(AFM位是1)、双滤波器模式(AFM位是0)。
单滤波器的配置定义了一个长滤波器(4字节、32位),由4个验收码寄存器和4个验收屏蔽寄存器组成的验收滤波器,滤波器字节和信息字节之间位的对应关系取决于当前接收帧格式。
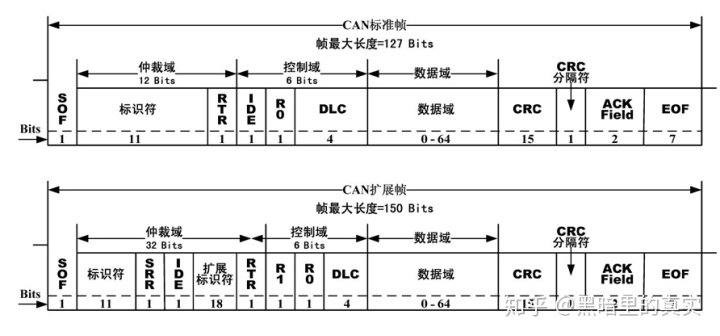
接收 CAN标准帧时单滤波器配置: 对于标准帧, 11 位标识符、 RTR位、数据场前两个字节参与滤波
对与参与滤波的数据,所有 验收屏蔽寄存器 AMR 为 0 的位所对应的 验收代码寄存器ACR位和参与滤波数据的对应位必须相 同才算验收通过;
接收 CAN扩展帧时单滤波器配置: 对于扩展帧, 29 位标识符和 RTR位参与滤波; 对与参与滤波的数据,所有 AMR 为“0”的位所对应的 ACR位和参与滤波数据的对应位必 须相同才验收通过滤波;
远程帧和数据帧非常相似,不同之处在于:
(1)RTR位,数据帧为0,远程帧为1;
(2)远程帧由6个场组成:帧起始,仲裁场,控制场,CRC场,应答场,帧结束,比数据帧少了数据场。
(3)远程帧发送特定的CAN ID,然后对应的ID的CAN节点收到远程帧之后,自动返回一个数据帧。
如果由于置位 RTR=1 位而没有数据字节,或因为设置相应的数据长度代码而没有或只有一个数据字节信息, 报文也会被接收。 对于一个成功接收的报文, 所有单个位在滤波器中的比 较结果都必须为“接受” ;
如果A需要B节点向你发送数据!A可以用B节点的ID,发送一个Remote frame(远程帧),B收到A ID 的 Remote Frame 之后就发送数据给A!发送的数据就是数据帧!
远程帧就像命令,命令相应的节点返回一个数据包.
双滤波器的配置
这种配置可以定义两个短滤波器,由4个 ACR和4个 AMR 构成两个短滤波器。
总线上的信 息只要通过任意一个滤波器就被接收。
滤波器字节和信息字节之间位的对应关系取决于当前接收的帧格式。
接收 CAN标准帧时双滤波器配置: 如果接收的是标准帧信息,被定义的两个滤波器是不一样的。
第一个滤波器由 ACR0、ACR1、AMR0、AMR1 以及 ACR3、AMR3 低 4 位组成, 11 位标识符、 RTR位和数据场第 1 字节参与滤波;
第二个滤波器由 ACR2、AMR2 以及 ACR3、AMR3 高 4 位组成, 11 位标识符和 RTR位参与滤 波。
如果没有数据字节向滤波器请求过滤, AMR1 和 AMR3 的低 4 位必须被置为“ 1”,即 “ 不 影响”。此时,两个滤波器的识别工作都是验证包括 RTR 位在内的整个标准识别码
接收CAN标准帧
设置模式寄存器的验收滤波器模式位( AFM)为 0,选择双滤波器模式;
设置验收代码寄存器 ACR0=0x0A、ACR1=0x40、ACR2=0x6B、ACR3=0xE0;
根据双滤波器时信息帧与滤波器的位对应关系, 将需要参与滤波的信息位对应的验收屏蔽寄 存器位设置为 0,设置 AMR0=0x00, AMR1=0x0F、AMR2=0x00、AMR3=0X0F;
接收 CAN扩展帧
双滤波器配置: 如果接收到扩展帧信息,定义的两个滤波器是相同的。 第一个滤波器由 ACR0、ACR1和 AMR0、 AMR1 构成; 第二个滤波器由 ACR2、ACR3和 AMR2、 AMR3 构成; 两个滤波器都只比较扩展识别码的前两个字节,即 29 位标识符中得高 16 位。 为了能成功接收信息,所有单个位的比较时至少有一个滤波器表示接收。
设置模式寄存器的验收滤波器模式位( AFM)为 0,选择双滤波器模式;
设置验收代码寄存器 ACR0=0x0A、ACR1=0x4A、ACR2=0x6B、ACR3=0XE9;
根据双滤波器时信息帧与滤波器的位对应关系, 将需要参与滤波的信息位对应的验收屏蔽寄 存器位设置为 0,设置 AMR0=0x00, AMR1=0x00、AMR2=0x00、AMR3=0X00;
typedef struct _INIT_CONFIG {
DWORD AccCode;
DWORD AccMask;
DWORD Reserved;
UCHAR Filter;
UCHAR Timing0;
UCHAR Timing1;
UCHAR Mode; } VCI_INIT_CONFIG, *PVCI_INIT_CONFIG;

Filter 滤波方式,允许设置为0-3,
Mode
=0表示正常模式(相当于正常节点),
=1表示只听模式(只接收,不影响总线),此模式下SJA1000不会发送错误帧,用于自动检测波特率;SJA1000以不同的波特率接收CAN帧,当收到CAN帧时,表明当前波特率与总线波特率相同
=2表示自发自收模式(环回模式),自测(环回)模式用于适配器进行自测试, 让CAN模块接收它自己的报文。在该模式下, CAN模块发送路径在内部与接收路径相连 接。该模式下会提供“假”应答,从而不需 要另一个节点来提供应答位。CAN报文不会 实际发送到CAN总线上。适配器发出的CAN 帧将能被适配器接收回来。
波特率设置
CAN总线无时钟,使用异步串行传输;波特率是1秒发送的数据位;

与波特率相关的寄存器共有 7 个,分别是:
同步跳转宽度、
预分频、
采样点、
相位缓冲段 2 选择位、
同步段、
传播时间段、
相位缓冲段 1 、
相位缓冲段 2。

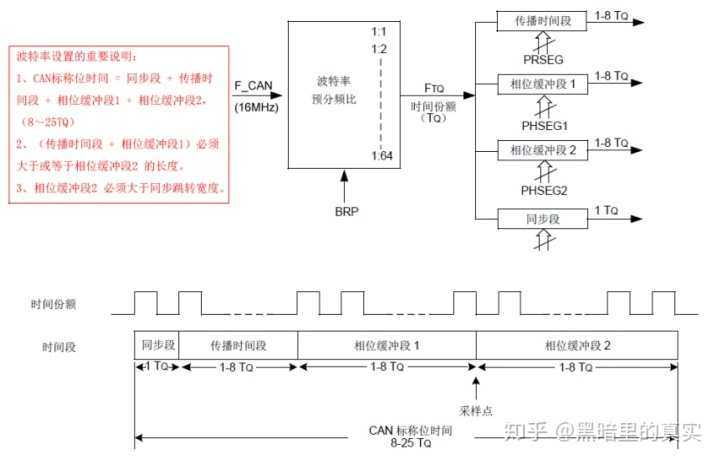
CAN标称位时间 = 同步段 + 传播时间段 + 相位缓冲段1 + 相位缓冲段2,(8~25TQ)
(传播时间段 + 相位缓冲段1)必须大于或等于相位缓冲段2的长度
相位缓冲段2必须大于同步跳转宽度
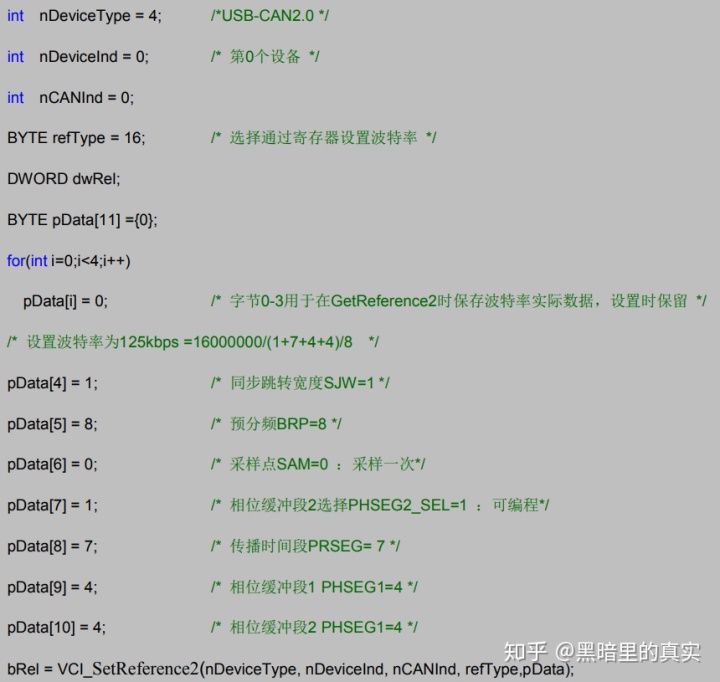
波特率计算公式=16000000/(同步段+传播时间段+相位缓冲段 1+相位缓冲段 2)/预分频
送CAN信息帧
typedef struct _VCI_CAN_OBJ
{
UINT ID;
UINT TimeStamp; //设备接收到某一帧的时间标识。时间标示从CAN卡上电开始计时,计时单位为0.1ms
BYTE TimeFlag;//是否使用时间标识,为1时TimeStamp有效,TimeFlag和TimeStamp只在此帧为接收帧时 有意义
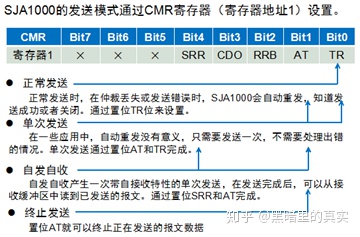
BYTE SendType; //发送帧类型。 =0时为正常发送(发送失败会自动重发,重发时间为4秒,4秒内没有发出则取消); =1时为单次发送(只发送一次,发送失败不会自动重发,总线只产生一帧数据); 其它值无效。
BYTE RemoteFlag; //是否是远程帧。=0时为为数据帧,=1时为远程帧(数据段空)。
BYTE ExternFlag; //是否是扩展帧。=0时为标准帧(11位ID),=1时为扩展帧(29位ID)。
BYTE DataLen; //数据长度 DLC (<=8),即CAN帧Data有几个字节。约束了后面Data[8]中的有效字节。
BYTE Data[8];
BYTE Reserved[3];
}
CAN帧发送:
发送CAN帧的步骤:
1.检测状态寄存器,等待发送缓冲区可用;
2.填充报文到发送缓冲区;
3.启动发送。
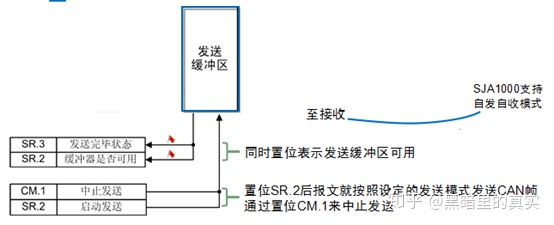
SJA1000具有一个12字节的缓冲区,要发送的报文可以通过寄存器16-28写入,也可通过寄存器96-108写入或读出

















 834
834











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









