






最近在整理总线的基本知识,前几天对LIN总线进行了整理—>LIN总线。今天来整理一下CAN总线,首先回顾一下之前写过的CAN相关的文章。
CAN总线错误处理机制
基于CAN的刷写流程
CAN消息中的Motorola和Intel
CAN一致性测试是什么
CAN历史
1983年,BOSCH开始着手开发CAN总线;
1986年,在SAE会议上,CAN总线正式发布;
1987年,Intel和Philips推出第一款CAN控制器芯片;
1991年,奔驰 500E 是世界上第一款基于CAN总线系统的量产车型;
1991年,Bosch发布CAN 2.0标准,分 CAN 2.0A (11位标识符)和 CAN 2.0B (29位标识符);
1993年,ISO发布CAN总线标准(ISO 11898),随后该标准主要有三部分:
ISO 11898-1:数据链路层协议
ISO 11898-2:高速CAN总线物理层协议
ISO 11898-3:低速CAN总线物理层协议
注意:ISO 11898-2和ISO 11898-3物理层协议不属于 BOSCH CAN 2.0标准。
2012年,BOSCH发布 CAN FD 1.0 标准(CAN with Flexible Data-Rate),CAN FD定义了在仲裁后使用不同的数据帧结构,从而达到最高 12Mbps 数据传输速率。CAN FD与CAN 2.0协议兼容,可以与传统的CAN 2.0设备共存于同样的网络。
CAN总线特点
CAN总线是一种串行数据通讯协议,具有对数据的位填充,数据块编码,循环冗余校验,帧优先级的判别等功能。其主要特点如下:
1、多主控制:在总线空闲时,所有节点都可以发送消息,最先访问总线的节点获得发送权,或当同时发时,高优先级ID获得发送权;
2、系统的柔软性:在CAN局域网内,增加节点不影响局域网内其他节点;
3、远程数据请求:可通过发送“遥控帧”请求其他节点发送数据;
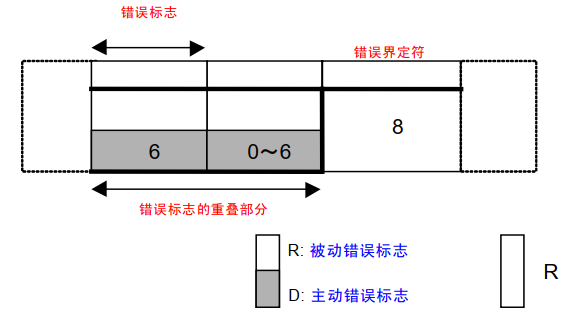
4、错误检测功能、错误通知功能、错误恢复功能 ,CAN错误可以回顾CAN总线错误处理机制,对CAN故障及恢复有详细的讲解。
5、远程数据请求:可通过发送“遥控帧”请求局域网内其他节点发送数据。总线拓扑
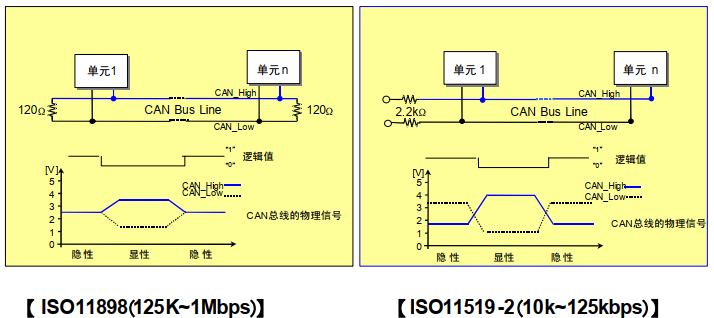
CAN总线采用双线传输,两根导线分别作为CAN_H、CAN_L,并在终端配备有120Ω电阻。收到总线信号时,CAN收发器将信号电平转化为逻辑状态,即CAN_H与CAN_L电平相减后,得到一个插值电平。总线上执行逻辑上的线“与”,显性电平为“0”,隐性电平为“1”。物理层特征如下图所示。
CAN帧的种类 CAN帧总共分为5种类型: 1、数据帧:用于发送节点向接收单元发送数据;
 2、遥控帧:用于接收节点向具有相同ID的发送节点请求数据;
2、遥控帧:用于接收节点向具有相同ID的发送节点请求数据;
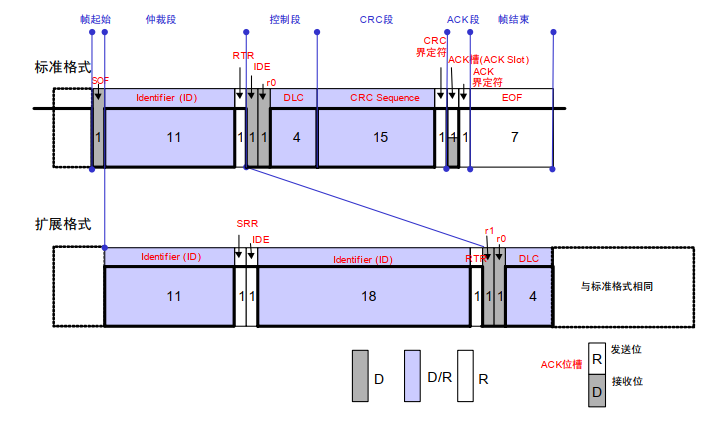
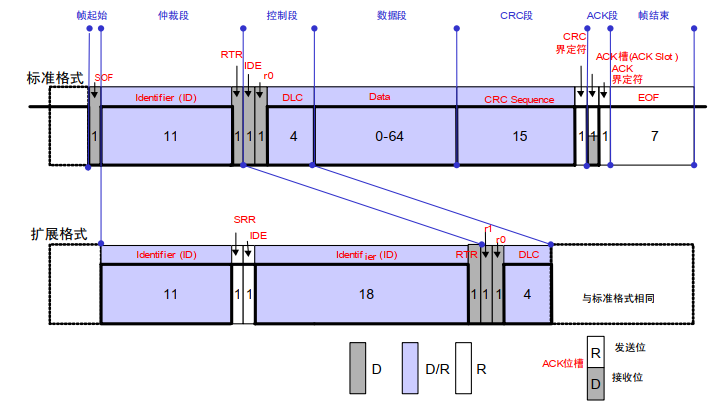
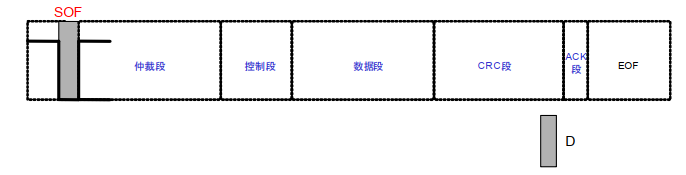
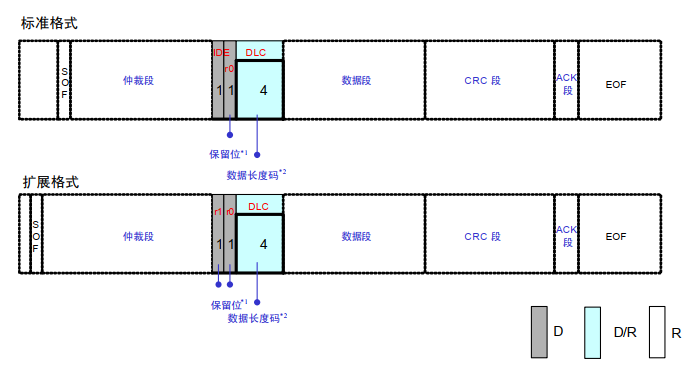
数据帧的帧结构 数据帧构成如下图所示,其由7部分构成。
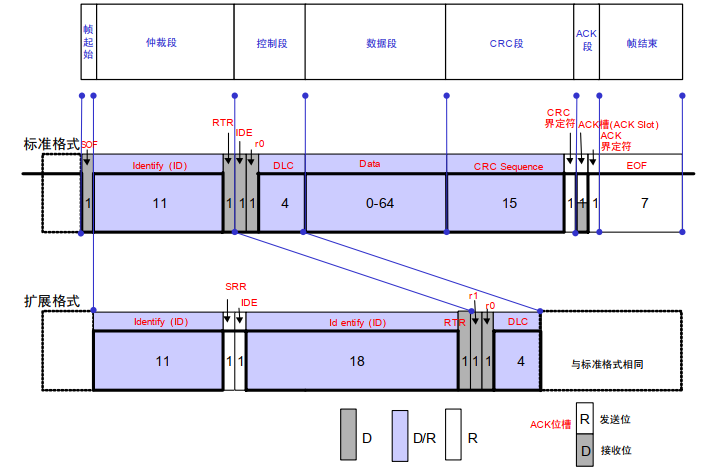
1、帧起始
在总线空闲时,总线为隐性状态。帧起始由单个显性位构成,标志着报文的开始,并在总线上起着同步作用。
2、仲裁段
仲裁的主要是定义了报文的标识符,也俗称ID。在CAN2.0A规范中,标识符为11位,而在CAN2.0B中变为了29位。这意味着在2.0B中可以存在更多不同类型的报文,但是也降低了总线的利用率。

3、控制段
主要定义了数据域字节的长度。通过数据长度码,接收节点可以判断报文数据是否完整。
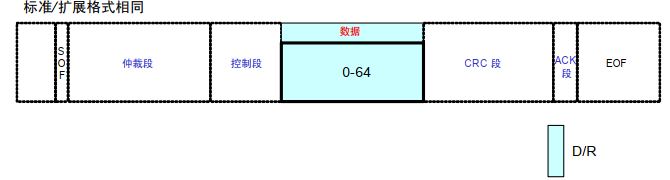
4、数据域
包含有0~8个字节数据。
5、CRC域
CRC又称循环冗余码校验,是检查帧传输错误的帧。由 15 个位的 CRC 顺序和 1 个位的 CRC 界定符组成,其CRC的计算范围包括帧起始、仲裁段、控制段、数据段。

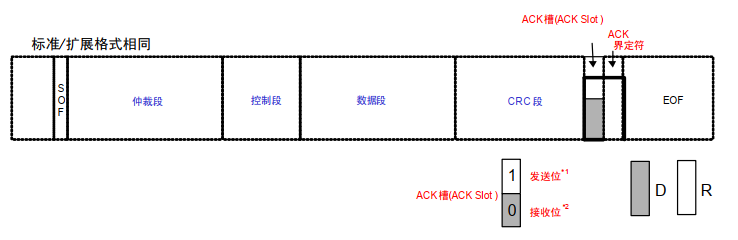
6、ACK域
用于接收节点确认是否正常接收,由ACK槽和ACK界定符组成。
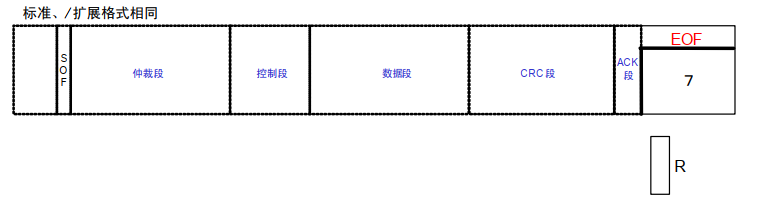
7、帧结束
由连续的7个隐性位组成,表示报文帧的结束。

点个“在看”再走!














 3655
3655











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









