







🚀write in front🚀
🔎大家好,我是黄桃罐头,希望你看完之后,能对你有所帮助,不足请指正!共同学习交流
🎁欢迎各位→点赞👍 + 收藏⭐️ + 留言📝💬本系列哔哩哔哩江科大STM32的视频为主以及自己的总结梳理📚
🚀Projeet source code🚀
💾工程代码放在了本人的Gitee仓库:iPickCan (iPickCan) - Gitee.com
引用:
STM32入门教程-2023版 细致讲解 中文字幕_哔哩哔哩_bilibili
Keil5 MDK版 下载与安装教程(STM32单片机编程软件)_mdk528-CSDN博客
STM32之Keil5 MDK的安装与下载_keil5下载程序到单片机stm32-CSDN博客
0. 江协科技/江科大-STM32入门教程-各章节详细笔记-查阅传送门-STM32标准库开发_江协科技stm32笔记-CSDN博客
【STM32】江科大STM32学习笔记汇总(已完结)_stm32江科大笔记-CSDN博客
江科大STM32学习笔记(上)_stm32博客-CSDN博客
STM32学习笔记一(基于标准库学习)_电平输出推免-CSDN博客
术语:
| 英文缩写 | 描述 |
| GPIO:General Purpose Input Onuput | 通用输入输出 |
| AFIO:Alternate Function Input Output | 复用输入输出 |
| AO:Analog Output | 模拟输出 |
| DO:Digital Output | 数字输出 |
| 内部时钟源 CK_INT:Clock Internal | 内部时钟源 |
| 外部时钟源 ETR:External clock | 时钟源 External clock |
| 外部时钟源 ETR:External clock mode 1 | 外部时钟源 Extern Input pin 时钟模式1 |
| 外部时钟源 ETR:External clock mode 2 | 外部时钟源 Extern Trigger 时钟模式2 |
| 外部时钟源 ITRx:Internal trigger inputs | 外部时钟源,ITRx (Internal trigger inputs)内部触发输入 |
| 外部时钟源 TIx:external input pin | 外部时钟源 TIx (external input pin)外部输入引脚 |
| CCR:Capture/Comapre Register | 捕获/比较寄存器 |
| OC:Output Compare | 输出比较 |
| IC:Input Capture | 输入捕获 |
| TI1FP1:TI1 Filter Polarity 1 | Extern Input 1 Filter Polarity 1,外部输入1滤波极性1 |
| TI1FP2:TI1 Filter Polarity 2 | Extern Input 1 Filter Polarity 2,外部输入1滤波极性2 |
正文:
0. 概述
从 2024/06/12 定下计划开始学习下江协科技STM32课程,接下来将会按照哔站上江协科技STM32的教学视频来学习入门STM32 开发,本文是视频教程 P2 STM32简介一讲的笔记。
定时器共四个部分,分为八个小节笔记。本小节为第一部分第一节。
🌳在第一部分,是定时器的基本定时的功能:定时中断功能、内外时钟源选择
🌳在第二部分,是定时器的输出比较功能,最常见的用途是产生PWM波形,用于驱动电机等设备
🌳在第三部分,是定时器的输入捕获功能和主从触发模式,来实现测量方波频率
🌳在第四部分,是定时器的编码器接口,能够更加方便读取正交编码器的输出波形,编码电机测速
1. 🚢输入捕获
定时器输入捕获相关的 stm32f10x_tim.h 中的函数原型:

| 函数原型 | 功能 |
| void TIM_ICInit(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct); | TIM定时器输入捕获初始化 |
| void TIM_ICStructInit(TIM_ICInitTypeDef* TIM_ICInitStruct); | TIM定时器输入捕获结构体初始化为默认值 |
| void TIM_PWMIConfig(TIM_TypeDef* TIMx, TIM_ICInitTypeDef* TIM_ICInitStruct); | 这个函数和TIM_ICInit类似都是用于初始化输入捕获单元的,但是TIM_ICInit函数只是单一地配置一个通道而TIM_PWMIConfig可以快速配置两个通道的PWMI模式(自动将另一个通道配置为相反的模式) |
| void TIM_PrescalerConfig(TIM_TypeDef* TIMx, uint16_t Prescaler, uint16_t TIM_PSCReloadMode); | TIM定时器预分频器设置 |
| void TIM_SelectInputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_InputTriggerSource); | 选择输入(从模式)触发源TRGI |
| void TIM_SetIC1Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC); void TIM_SetIC2Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC); void TIM_SetIC3Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC); void TIM_SetIC4Prescaler(TIM_TypeDef* TIMx, uint16_t TIM_ICPSC); | TIM定时器输入捕获通道IC1,IC2,IC3,IC4预分频器配置 |
| uint16_t TIM_GetCapture1(TIM_TypeDef* TIMx); uint16_t TIM_GetCapture2(TIM_TypeDef* TIMx); uint16_t TIM_GetCapture3(TIM_TypeDef* TIMx); uint16_t TIM_GetCapture4(TIM_TypeDef* TIMx); uint16_t TIM_GetCounter(TIM_TypeDef* TIMx); | TIM定时器获取输出捕获值CCR |
| void TIM_SelectOutputTrigger(TIM_TypeDef* TIMx, uint16_t TIM_TRGOSource); | 选择输出(主模式)触发源TRGO,选择主模式触发的触发源 |
| void TIM_SelectSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_SlaveMode); | 选择从模式需要执行的操作 |
| void TIM_SelectMasterSlaveMode(TIM_TypeDef* TIMx, uint16_t TIM_MasterSlaveMode); | TIM定时器主从模式,定时器级联 |
2. 🚢实验1-输入捕获测频率
两个代码的接线图都一样,如下
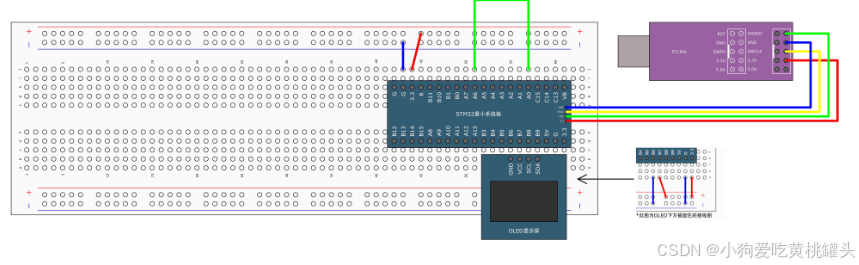
测量信号的输入引脚是PA6,信号从PA6进来,待测的PWM信号也是STM32自己生成的,输出引脚是PA0。
需要配置电路连接图示如下:

🌾第一步,RCC开启时钟,把GPIO和TIM的时钟打开
🌾第二步,GPIO初始化,把GPIO配置成输入模式(一般选择上拉输入或浮空输入模式
🌾第三步,配置时基单元,让CNT计数器在内部时钟的驱动下自增运行,和之前代码一
🌾第四步,配置输入捕获单元,包括滤波器、极性、直连通道、交叉通道、分频器这些参数,用一个结构体就可以统一进行配置了
🌾第五步,选择从模式的触发源,触发源选择为TI1FP1,这里调用一个库函数给一个参数就行了
🌾第六步,选择触发之后执行的操作,执行Reset操作,这里调用一个库函数就行了
最后,当这些电路都配置好之后,调用TIM_Cmd函数,开启定时器。这样所有的电路就能配合起来了,按照我们的要求工作了。当我们需要读取最新一个周期的频率时,直接读取CCR寄存器,然后按照fc/N,计算一下就行了,这就是整个程序的思路
注意滤波器和分频器的区别:虽然它俩都是计次,但是滤波器计次并不会改变信号的原有频率,一般滤波器的采样频率都会远高于信号频率,所以滤波器只会滤除高频噪声使信号更平滑,1KHz滤波之后仍然是1KHz,信号频率不会变化;而分频器就是对信号本身进行计次,会改变频率,1KHz,2分频之后就是500Hz,4分频就是250Hz。
源码
PWM.c
#include "stm32f10x.h" // Device header
#include "PWM.h"
void PWM_Init(TIM_TypeDef* TIMx)
{
//1. RCC开启时钟,把要用的TIM外设和GPIO外设的时钟打开
//2.配置时基单元,包括时钟源选择,预分频器,自动重装载器,时基单元就配置好了
//3.配置输出比较单元,包括CCR的值,输出比较模式,极性选择,输出使能这些参数
//4.初始化GPIO,把PWM的OC输出GPIO引脚配置为复用输出模式
//5.运行控制,启动计数器
//Setp 1.
//RCC APB1的外设时钟控制,因为TIM2在STM32的APB1外设总线上
if(TIMx == TIM2)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
//GPIO初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//Setp 2.
//选择时基单元的时钟,使用内部RCC时钟 CLK_INT (Clock_Internal)
TIM_InternalClockConfig(TIMx);
//Setp 3.
//配置时基单元
TIM_TimeBaseInitTypeDef TimeBaseInitStruct;
TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //时钟信号滤波使用,滤波的采样频率,采样点数
TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数器向上计数
TimeBaseInitStruct.TIM_Period = 100 - 1; //ARR, Auto-Reload Register 自动重装载寄存器的值,记得需要减一
TimeBaseInitStruct.TIM_Prescaler = 720 - 1; //PSC, 预分频器的值,记得需要减一
TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数器的值
TIM_TimeBaseInit(TIMx, &TimeBaseInitStruct);
//输出表通道1
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = 10; //CCR
TIM_OC1Init(TIMx, &TIM_OCInitStruct);
//输出PWM目标,PWM频率1KHz,PWM占空比 50%,PWM分辨率 1%
//PWM频率=72MHz/(PSC+1)(ARR+1) =>PSC 720
//PWM占空比=CCR/(ARR+1) ==>CRR 50
//PWM分辨率=1/(ARR+1) ==>ARR 100
//
//Setp 6.
//定时器启动
TIM_Cmd(TIMx, ENABLE);
}
void PWM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare)
{
TIM_SetCompare1(TIMx, Compare);
}
void PWM_SetPrescale(uint16_t Prescale)
{
TIM_PrescalerConfig(TIM2, Prescale, TIM_PSCReloadMode_Update);
}
PWM.h
#ifndef __PWM_H__
#define __PWM_H__
void PWM_Init(TIM_TypeDef* TIMx);
void PWM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare);
void PWM_SetPrescale(uint16_t Prescale);
#endif IC.c
#include "stm32f10x.h" // Device header
#include "InputCapture.h"
void IC_Init(void)
{
//使用定时器TIM3 CH1
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//使用定时器TIM3 CH1,在stm32功能表中对应PA6引脚
//GPIO初始化
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//Setp 2.
//选择时基单元的时钟,使用内部RCC时钟 CLK_INT (Clock_Internal)
TIM_InternalClockConfig(TIM3);
//Setp 3.
//配置时基单元
TIM_TimeBaseInitTypeDef TimeBaseInitStruct;
TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //时钟信号滤波使用,滤波的采样频率,采样点数
TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数器向上计数
TimeBaseInitStruct.TIM_Period = 65536 - 1; //ARR, Auto-Reload Register 自动重装载寄存器的值,记得需要减一
TimeBaseInitStruct.TIM_Prescaler = 72 - 1; //PSC, 预分频器的值,记得需要减一
TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数器的值
TIM_TimeBaseInit(TIM3, &TimeBaseInitStruct);
//TIM3定时器
//计数器频率=72MHz/(PSC+1)=72MHz/72=1MHz
//
//输入捕获功能配置
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICFilter = 0xF;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInit(TIM3, &TIM_ICInitStruct);
//选择输入Trigger
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
//TIM Slave功能
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
//定时器启动
TIM_Cmd(TIM3, ENABLE);
}
uint16_t IC_GetRate(void)
{
return 1000000/(TIM_GetCapture1(TIM3) + 1);
}
IC.h
#ifndef __INPUT_CAPTURE_H__
#define __INPUT_CAPTURE_H__
void IC_Init(void);
uint16_t IC_GetRate(void);
#endifman.c
#include "stm32f10x.h" // Device header
#include "oled.h"
#include "PWM.h"
#include "Delay.h"
#include "InputCapture.h"
uint8_t KeyNum = 0;
int main(int argc, char *argv[])
{
int i = 0;
OLED_Init();
OLED_ShowString(1, 1, "PWM IC");
PWM_Init(TIM2);
PWM_SetCompare1(TIM2, 80);
PWM_SetPrescale(360-1);
IC_Init();
while(1)
{
OLED_ShowNum(2,1,IC_GetRate(), 5);
}
return 1;
}
2.1 实验结果
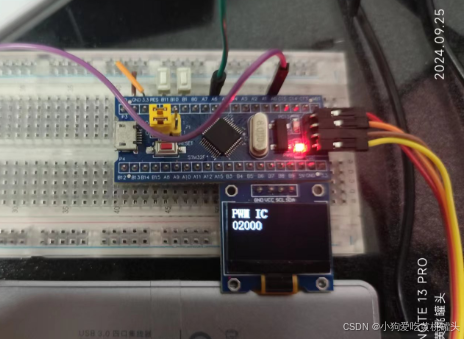
逻辑分析仪抓取到的频率为2000Hz,占空比Duty=80%。

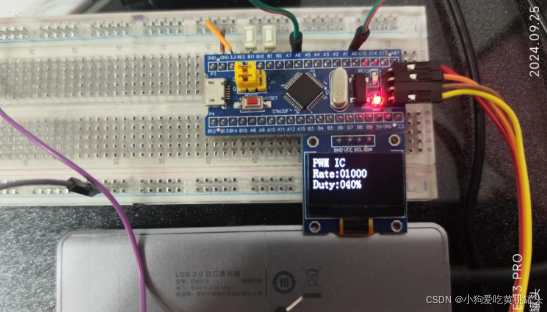
3.🚢实验2-PWMI输入捕获测频率和占空比
IC.c文件改进使用 PWMI 输入捕获模式测量输入PWM信号的频率和占空比。
PWM.c
#include "stm32f10x.h" // Device header
#include "InputCapture.h"
void IC_Init(void)
{
//使用定时器TIM3 CH1
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//使用定时器TIM3 CH1,在stm32功能表中对应PA6引脚
//GPIO初始化
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//Setp 2.
//选择时基单元的时钟,使用内部RCC时钟 CLK_INT (Clock_Internal)
TIM_InternalClockConfig(TIM3);
//Setp 3.
//配置时基单元
TIM_TimeBaseInitTypeDef TimeBaseInitStruct;
TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; //时钟信号滤波使用,滤波的采样频率,采样点数
TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //计数器向上计数
TimeBaseInitStruct.TIM_Period = 65536 - 1; //ARR, Auto-Reload Register 自动重装载寄存器的值,记得需要减一
TimeBaseInitStruct.TIM_Prescaler = 72 - 1; //PSC, 预分频器的值,记得需要减一
TimeBaseInitStruct.TIM_RepetitionCounter = 0; //重复计数器的值
TIM_TimeBaseInit(TIM3, &TimeBaseInitStruct);
//TIM3定时器
//计数器频率=72MHz/(PSC+1)=72MHz/72=1MHz
//
//输入捕获功能配置
TIM_ICInitTypeDef TIM_ICInitStruct;
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_1;
TIM_ICInitStruct.TIM_ICFilter = 0xF;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
// TIM_ICInit(TIM3, &TIM_ICInitStruct);
//
// TIM_ICStructInit(&TIM_ICInitStruct);
// TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
// TIM_ICInitStruct.TIM_ICFilter = 0xF;
// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Falling; //占空比下降沿触发
// TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
// TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_IndirectTI;
// TIM_ICInit(TIM3, &TIM_ICInitStruct);
//使用PWMI输入捕获设置函数
TIM_PWMIConfig(TIM3, &TIM_ICInitStruct);
//选择输入Trigger
TIM_SelectInputTrigger(TIM3, TIM_TS_TI1FP1);
//TIM Slave功能
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
//定时器启动
TIM_Cmd(TIM3, ENABLE);
}
uint16_t IC_GetRate(void)
{
return 1000000/(TIM_GetCapture1(TIM3) + 1);
}
uint16_t IC_GetDuty(void)
{
return (TIM_GetCapture2(TIM3) + 1)*100/TIM_GetCapture1(TIM3);
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









