









Single-shot Refinement Neural Network for Object Detection
(CVPR 2018)
该论文结合了one-stage和two-stage方法,具体来说是结合的Faster RCNN和SSD。前者首先提取候选区域,再进行目标的分类和回归,检测精度高于后者;后者的检测速度快,精度稍差,主要原因是因为正负样本比例严重失调。RefineDet结合了这两种方法,克服它们各自的缺点。
主要的网络结构图如下,包括ARM anchor细化(Anchor Refinement Module)模块和ODM 目标检测(Object Detection Module)模块。ARM是一个简化后的SSD网络,在多个尺度下进行anchor的前景背景二分类,同时通过回归对目标框的位置和尺寸进行大致的调整,为后续的ODM模块提供一个好的初始化区域。相当于Faster RCNN中的RPN提取部分,不同的是此处为多尺度预测anchor;ODM可以看做一个fast RCNN,对提取出来的兴趣目标区域进行多尺度的预测,包括目标类别分类和目标框回归。二者之间通过TCB(Transfer Connection Block)进行不同网络层的特征融合,共享特征,如下图所示。总体来看,ARM减小分类器的搜索空间,粗略描述anchor的位置和大小。TCB将ARM中的特征,传输给ODM模块,以获取更加准确的目标位置和大小。网络将原来two-stage的串行结构转化成了并行结构。


one-stage精度落后于two-stage的一个主要原因是类别不平衡。为了解决这种问题,作者采用了Negative anchor过滤。在训练阶段,针对ARM中的anchor,如果negative confidence大于一个阈值θ(θ=0.99),那么在训练ODM时将它舍弃。也就是通过hard Negative anchor和ARM anchor来训练ODM。
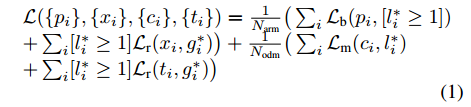
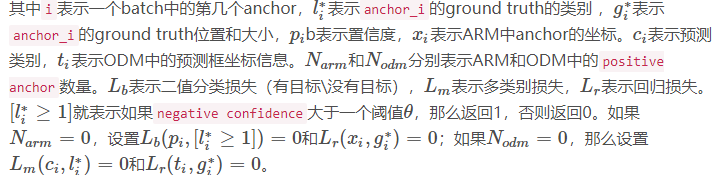
损失函数包括两部分:ARM损失和ODM损失。















 498
498











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









