







动态规划(Dynamic Programming)
1.理论定义
- 简称 dp
- 动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。不像搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。我们也可以通过对若干有代表性的问题的动态规划算法进行分析、讨论,逐渐学会并掌握这一设计方法。
- 动态规划一般可分为线性动规,区域动规,树形动规,背包动规四类。
2.解决的问题的基本思想
动态规划程序设计主要是用于求一些问题的最优解
首先来了解一下动态规划中的术语
-
阶段:就是把整个解题过程分解成若干个阶段
例如坐火车从北京到深圳,每次的经停一个地方都是一个阶段 -
状态:状态表示每个阶段开始面临的自然状况或客观条件,它不以人们的主观意志为转移,也称为不可控因素
-
无后效性:如果给定某一阶段的状态,则在这一阶段以后过程的发展不受这阶段以前各段状态的影响,所有各阶段都确定时,整个过程也就确定
-
决策:一个阶段的状态给定以后,从该状态演变到下一阶段某个状态的一种选择(行动)称为决策。在最优控制中,也称为控制
-
策略:由每个阶段的决策组成的序列称为策略
策略集合:中达到最优解的策略称为最优策略
解决问题的基本模型
- 根据上例分析和动态规划的基本概念,可以得到动态规划的基本模型如下:
-
确定问题的决策对象。
-
对决策过程划分阶段。
-
对各阶段确定状态变量。
-
根据状态变量确定费用函数和目标函数。
-
建立各阶段状态变量的转移过程,确定状态转移方程。
状态转移方程的一般形式: 一般形式: U:状态; X:策略 顺推: f[Uk]=opt{f[Uk-1]+L[Uk-1,Xk-1]} L[Uk-1,Xk-1]: 状态Uk-1通过策略Xk-1到达状态Uk 的费用 初始f[U1]; 结果:f[Un]。 倒推: f[Uk]=opt{f[Uk+1]+L[Uk,Xk]} L[Uk,Xk]: 状态Uk通过策略Xk到达状态Uk+1 的费用 初始f[Un];结果:f(U1)
应用实际
经典问题:求数字三角形的最大路径和
难度:简单
该题如图:
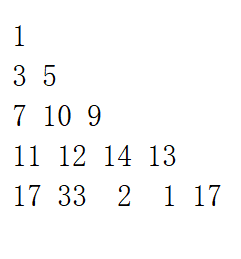
输入这样的数字三角形,输出的最大和:33+12+10+5+1=61
所以要解这个问题,就是确定何种方式能找到最大路径和,所以这个时候我们可以创建一个二维矩阵
这也是我们解决动态规划问题的常用方式

解题思路:
此时我们可以定义每个矩阵的数值为:
D[i][j]
最大路径和为:max_sum[i] [j]
通常解题方式:
通常我们找最大路径都是从第一行开始找,然后向下找,从而找最大值,并且记录每一行的最大值
这中情况下我们的状态方程就是max_sum[ i ][ j ] = max( sum_sum[i+1][j],sum[i+1][j+1])+D[i][j];
不过在这种情况下,我们需要记录每一个点的路径和,过于消耗空间资源
如图所示:

优化后的解题方式:
- 优化方式:从最后一行向前递推
- 并且这时我们也不再需要二维矩阵记录最大值
max_sum[i][j], - 只需要一维矩阵max_sum[n]就可以了,记录从最后一行开始每一个最大值的变化
- 解题思路如图

思路清晰以后我们可以轻松的写出代码:
#include<bits/stdc++.h>
using namespace std;
int main(){
int n;
int i,j;
cin >> n;
vector<int>max_sum(n+1);
vector<vector<int>> dp(n+1,vector<int>(n+1));
for(i=1;i<=n;i++)
for (j = 1; j <= i; j++)
{
cin >> dp[i][j];
if (i == n){
max_sum[j] = dp[i][j];
}
}
for (int i = n - 1; i > 0; --i)
for (int j = 1; j <= i; ++j)
max_sum[j] = max(max_sum[j], max_sum[j + 1]) + dp[i][j];
cout << max_sum[1] << endl;
system("pause");
return 0;
}
}















 544
544











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









