






研究背景:混动系统扭振问题比较棘手,为了评估扭振水平就需要测量轴系的转速信号。传统的方法是用磁电转速传感器测量飞轮、齿轮等获得转速信号。本文的目的是提供一种通过电机旋转变压器的电压信号完成转速测量或计算的方法。
本文的适用范围:正-余弦旋转变压器:

图1,旋变实物
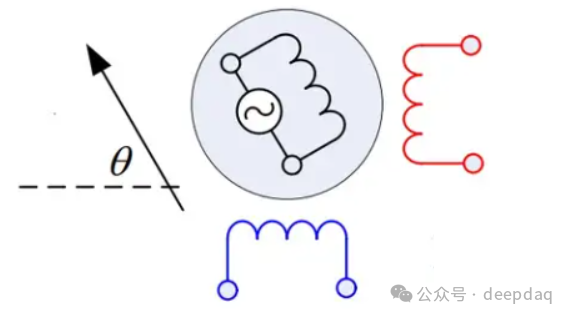
图2、旋变原理图
先简单理解一下:这个旋变个人把他简化为变压器,中间转子部分施加一个高频正弦激励电压,一般为10000Hz。这个周期变化的电压会引起定子线圈上的感应,且频率保持一致,如下图:
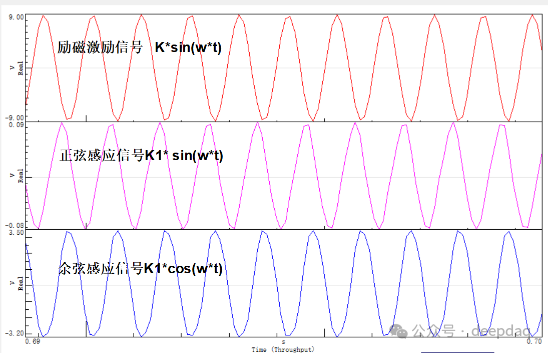
图3、转速为0时的电压信号
需要注意的是图3中是电机转速为0的数据。
在图1中可以发现转子外轮廓近似于正弦的形状,在图2中蓝色线圈和红色线圈空间布置相差90度。
当电机旋转起来之后,一方面因为转子轮廓的近似正弦的变化必定会对蓝色及红色线圈中产生的感应电压产生调制,另一方面因为空间布置相差90°,蓝色线圈两端的感应电压(Usin)与红色线圈的感应电压(Usin)相差90°,实测数据如下图:
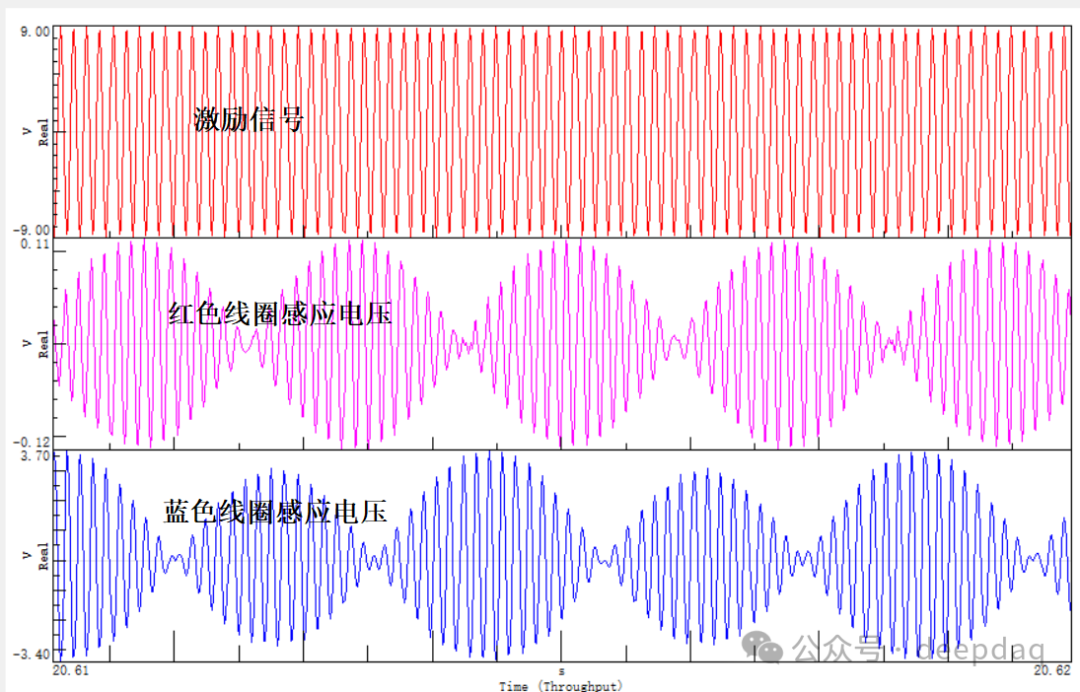
图4、某转速下的旋变电压。
给出上述信号数学表达式:
激励信号:V:U*sin(wt) 式(1)
正弦感应信号:Vsin = KU*sin(wt)*sin(e) 式(2)
余弦感应信号:Vcos = KU*sin(wt)*cos(e) 式(3)
U:激励信号的电压幅值;w:激励信号的频率;K:匝数比等引起的比例系数
e 转子角度;这个角度就是我们需要得到的。
计算这个e的方法很多,本文采用同步检波法:同步检波法又称相干解调,常用于线性调制信号的解调。其方法是利用乘法器,将输出的信号与同频率同相位载波信号的相乘,然后通过低通滤波器滤除高频信号即可得到所需的包络信号。
数据表达式:
Vsin*V= KU*sin(wt)*sin(e)*U*sin(wt) 式(4)
Vcos*V= KU*sin(wt)*cos(e)*U*sin(wt) 式(5)
根据三角函数公式得:
Vsin*V= KU^2/4[2*cos(e)-cos(2wt-e)-cos(2wt+e)] 式(6)
Vcos*V= KU^2/4[2*sin(e)-sin(2wt-e)-sin(2wt+e)] 式(7)
如果转子按照w0的频率旋转是e = w0*t;
Vsin*V这个信号由下面三个频率信号组成:
KU^2/4*2*cos(e)=KU^2/4*2*cos(w0*t) 式(8)
KU^2/4*cos(2wt-e) =KU^2/4*cos((2w-w0)*t) 式(9)
cos(2wt+e) = cos(2wt+w0*t)=cos((2w+w0)*t) 式(10)
因为发动机转速一般不超过6000rpm 故w0一般小于100hz;
常见的激励信号频率10000Hz居多,所以2w-w0 和2w+w0都是高频的。
因此我们采用低通滤波的方法去除高频保留低频:
Vsin*V 被滤波后就变成了 KU^2/4*2*cos(e)
同理
Vcos*V 被滤波后就变成了 KU^2/4*2*sin(e)
进一步:Vcos*V/Vsin*V =sin(e)/cos(e)
利用反正切计算转角e = arctan(sin(e)/cos(e)) 式(11)
转角e微分之后获得w0即角速度。
测量:
如果是NVH测试工程,目前就可以展开测试了。把图1 中的线接出来完成电压测试。
有使用teatlab的小伙伴参考下面的公式:
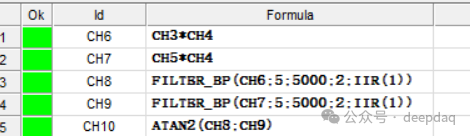
图5
CH3 即 Vsin;CH5 即 Vcos;CH4 即 V;滤波和反正切计算也很简单。
仿真:如果当前不具备测试条件也可以通过仿真的方法。本文利用AMEsim实现:
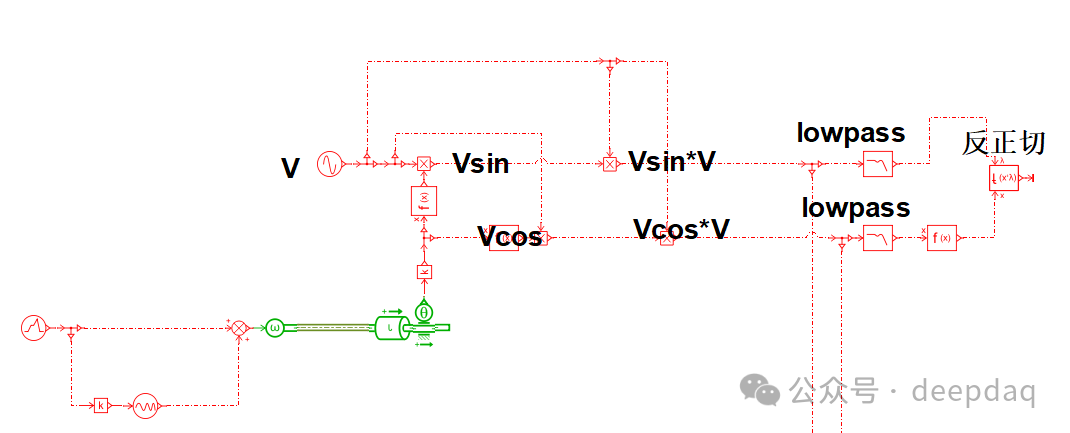
图6、模型
结果:
通过仿真验证了该方法的有效性:
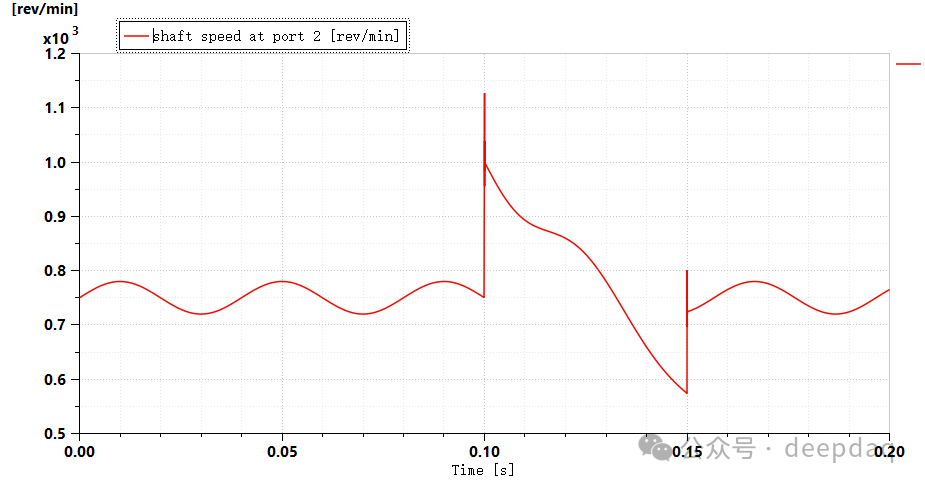
图7、模型中控制转速
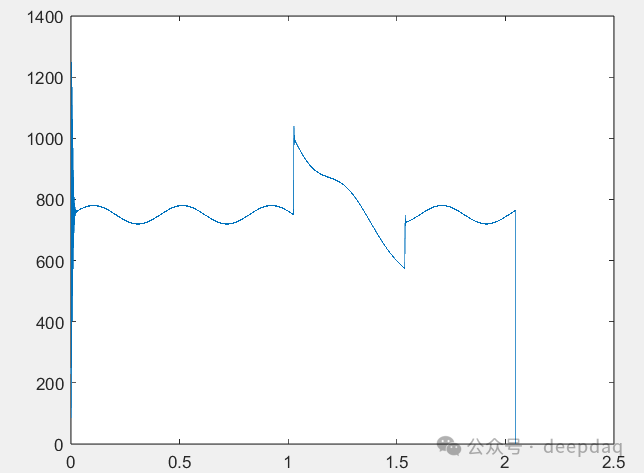
图8、通过本文采用的方法获得转速
通过结果对比本文采用的方法满足扭振测试的需要
由于测试条件的不同每个人可能会遇到不同的问题,可随时私信交流。















 331
331

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









