







1. master&&node
mater中文名又称为节点管理器,作为管家管理所需要的进程,其作用有两个:
每个node启动时都要向master注册。
管理node之间的通信。
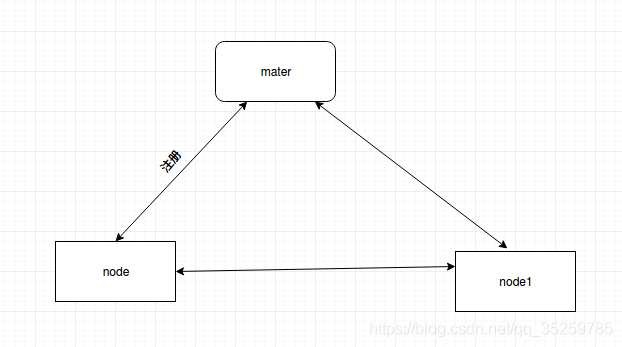 node先找master登记,登记完了才能启动。如果有很多的node两两之间的通信靠master的介绍完成的。
node先找master登记,登记完了才能启动。如果有很多的node两两之间的通信靠master的介绍完成的。
启动ros master:
$ roscore
node的启动方法:
$ rosrun [pkg_name][node_name]
与rosnode相关的命令:
#列出当前运行的node信息
$ rosnode list
#显示某个node的详细信息
$ rosnode info [node_name]
#结束某个node
$ rosnode kill [node_name]
启动master和多个node
$ roslaunch [pkg_name][file_name.lauch]
下面是实际例子参考ROS学习之路(一)创建必要文件:
$ source ~/catkin_ws/devel/setup.bash
$ cd ~/catkin_ws/src/ROS-Academy-for-Beginners
$ roslaunch robot_sim_demo robot_spawn.launch
在新的终端里
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2920
2920











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









