






DWM1000 超宽带测距,使用的TOF(time of fly) 的方式,也就是计算无线电磁波传输时间,通过传输的时间换算成距离。 电磁波传输速率和光速一样,速度是299792.458km/s,可参见百度百科。如果想通过测试这个传播时间换算距离,那么就需要非常高的内部时钟。然。。。并不是有了高速的内部时钟即可测距,还需要一点,数据送达天线的精确时间,也就是我们发送数据时,何时将数据送到天线,以及接收到有效数据到天线时的确切时钟。 理论上所有满足以上两点的射频收发器都可以实现TOF测距。
DWM1000有一个delayed 发送,也就是延时发送,可以精确控制发送时间,其实这个可用可不用,用了它可以减少一次数据传输而已。
下面简单介绍官方提供基础例子中的SS-TWR 和 DS-TWR
不论SS-TWR 还是DS-TWR 都是双边测距,能够得到两个模块之间的距离信息,而不是位置信息,位置信息需要后期使用高中数学知识计算。
参考官方资料,但并不会逐句翻译,尽量写我的理解,且别人更容易理解的语句。
官方参考资料:《dw1000_user_manual_2.10》APPENDIX 3: Two-Way Ranging
1 Single-sided Two-way Ranging(SS-TWR)
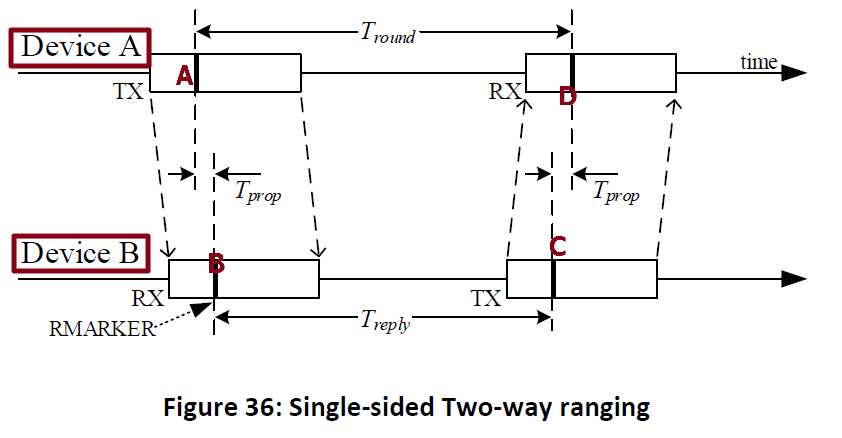
一共有两个设备,也就是两个DWM1000 模块,分别称为DeviceA 和 DeviceB, DeviceA 在A 时刻发送一条信息给DeveiceB,经过空中一段时间传播(Tprop)在时刻B到达B设备。
我们很直观的可以看到,时刻B - 时刻A 就是信号的传播时间,也就是Tprop,然后换算距离,是否可行? 答案是不能! 因为A 和B 都有独立的时钟,并没有同步,假如二者时钟可以同步,那么这样计算是最好的。
什么是二者时钟同步? 就是某一个时刻下,设备A 和 设备B 时钟节拍一样,假如都是20180个时钟节拍(时钟节拍从系统上电或者PLL稳定后,从0到最大然后依次0 最大往复)或者两者知道确切的差值。然DWM1000 模块间显然没有这么高的能力让不同模块间时钟同步。
待续

















 1390
1390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









