






电机的供电电源正极对应的就行磁线圈的S极。无论是有刷、无刷都是S极。利用同极排斥。异极相吸的原理进行电机的旋转。
无刷直流电机和有刷直流电机区别在于:
①无刷直流电机是是通过电刷和换向器实现换向。②有刷直流电机通过逆变电路实现驱动换向。
有刷电机是线圈转。无刷电机是磁芯转。
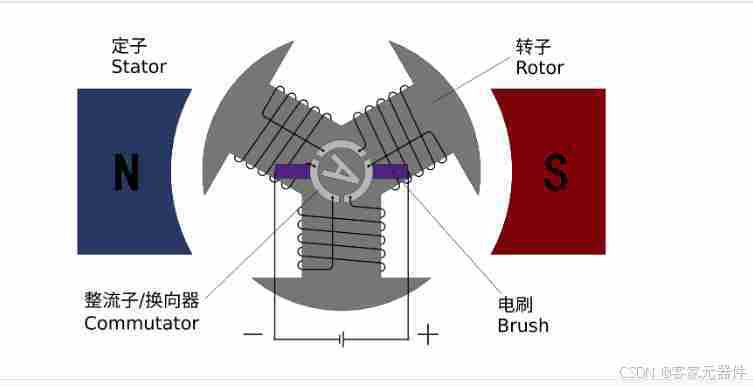
一、直流有刷电机
①、三相直流有刷电机是由电源决定的。电源的方向决定了旋转的方向。正极在那边就往那边转。
②、三相:电源的正极最近的相是S极。另外两相则是N极。
通电后。电机转动一直变化的是三相电机的极性。每转60°。逆时针变化一次线圈的极性。
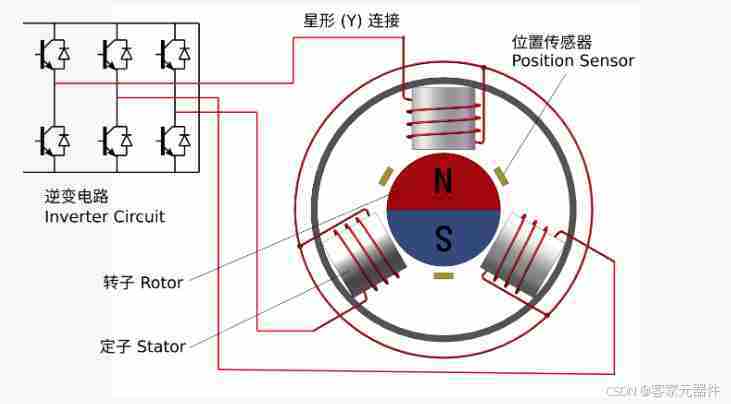
二、直流无刷电机
通过MOS的导通让三相电磁线圈的两相通电。实现正反转。每两相通电。转子会随着转动。转子的转动的角度是60°。正反向需要看电源的输入方向。
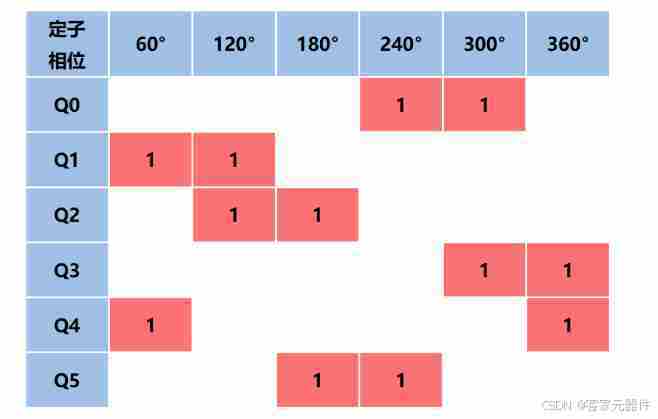
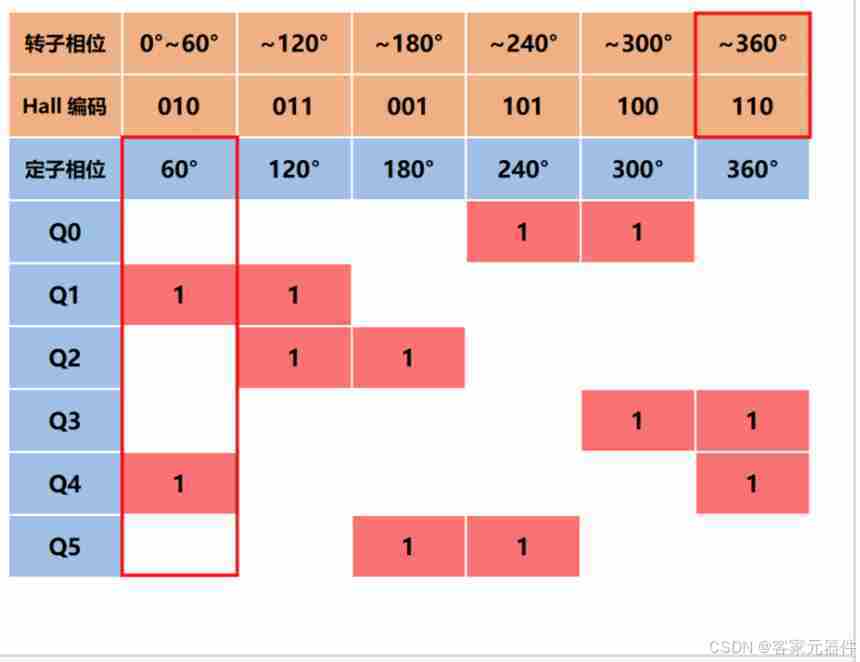
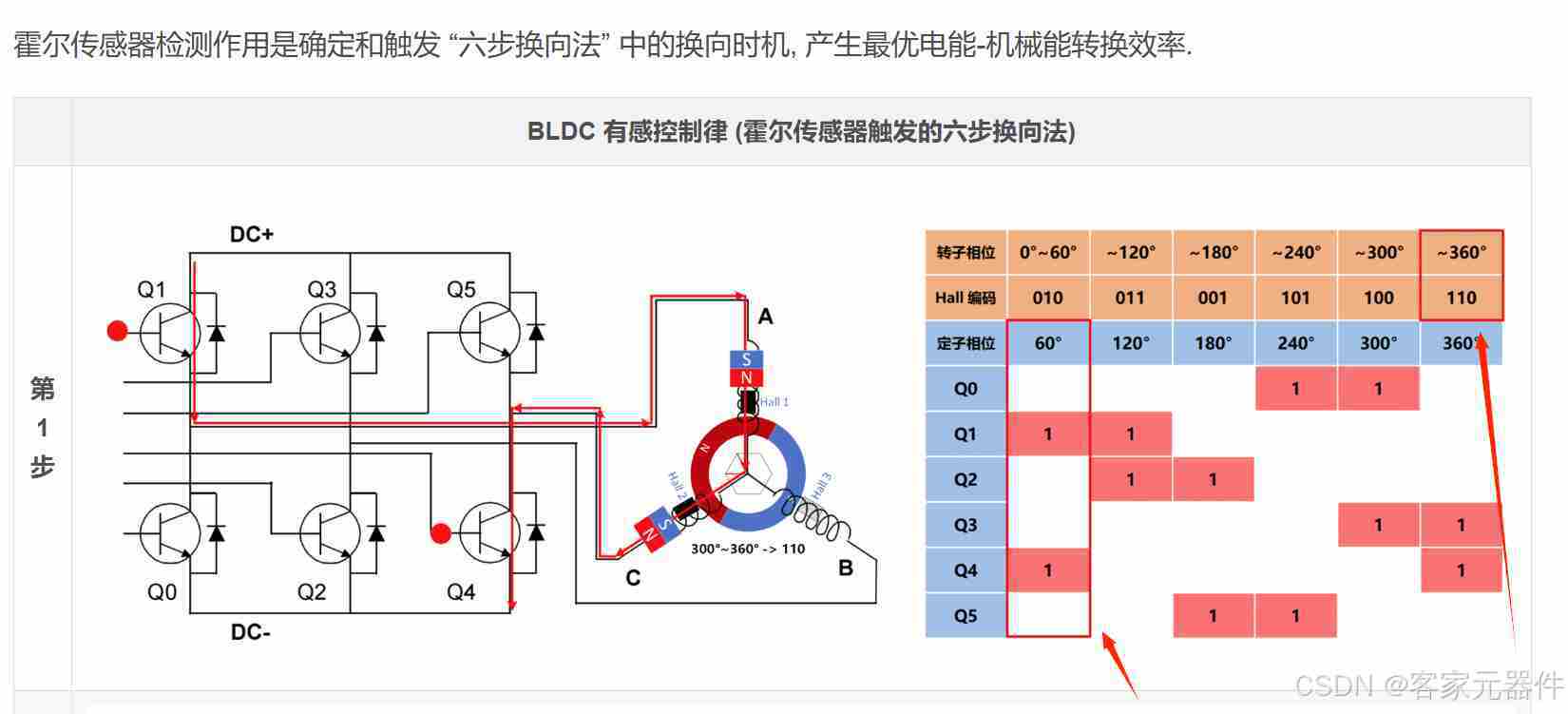
常用六步换向时序
①、六步换向法时序, 同一时间只有两相导通 (120° 导通), 另一相不导通 (悬空)。
②、转子每转过 60° 电角度, 定子换向一次, 定子旋转磁场在一次换向后也变化 60° 电角度, 实现同步控制。每次只切换一相。
③、电源正极对应是S极。输出是N。中间S&N磁铁靠近哪两边。就打开哪两边的MOS管。电流方向根据正反转决定。
直流无刷电机怎么判断应该要进行换相了呢?
通过有感驱动和无感驱动两类。
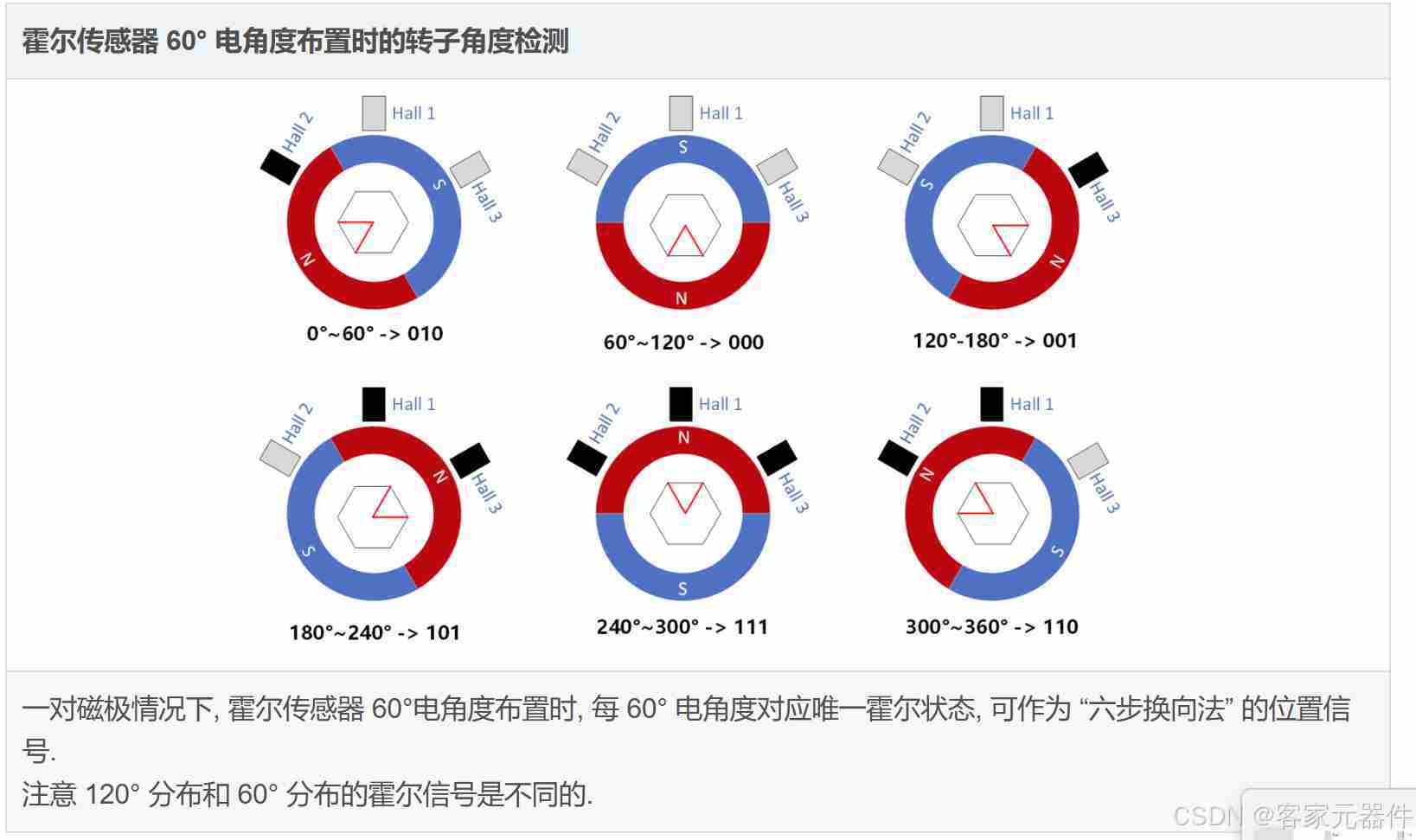
有感驱动:通过hall传感器采集转子位置信号。再根据hall信号进行电流换相。
优点:①电机启动和低速时可以做到大力矩输出;②启动时不会有抖动, 非常顺畅
缺点:①霍尔自身比较敏感脆弱,容易受到其他信号的干扰
②增加信号线(+5根)和结构安装。
③增加了体积和成本
运用场景:这类电机主要运用在需要频繁启动、停止、反转的地方。车模和船模中比较常用。
PS:一般hall要么是60°。要么是120°分布。大多数都是跟三相电机一样是120°分布。60°和120°的信号是不一样的。
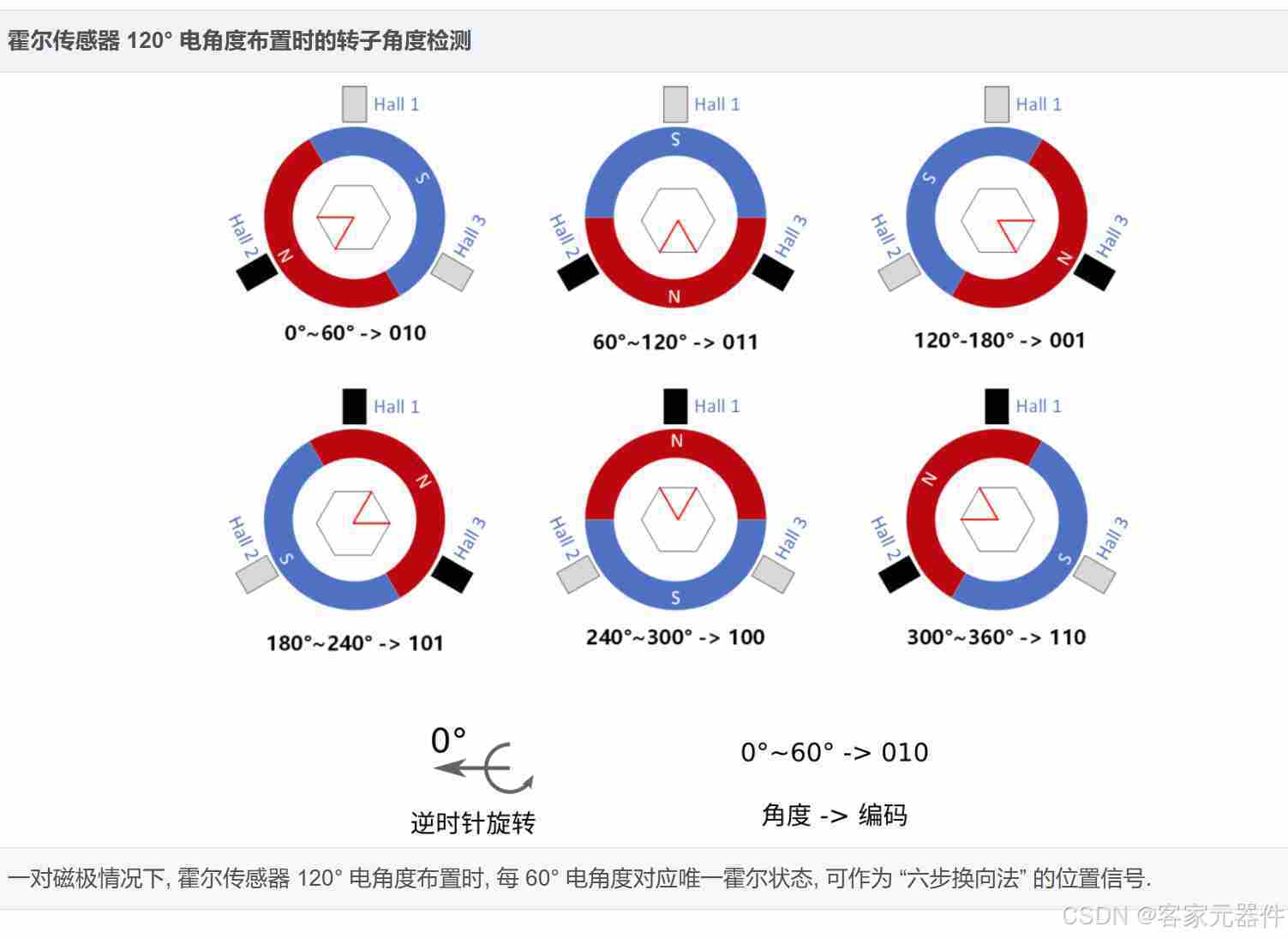
120°分布情况下反向旋转的的hall编码。
有感控制策略:
①、起始位置
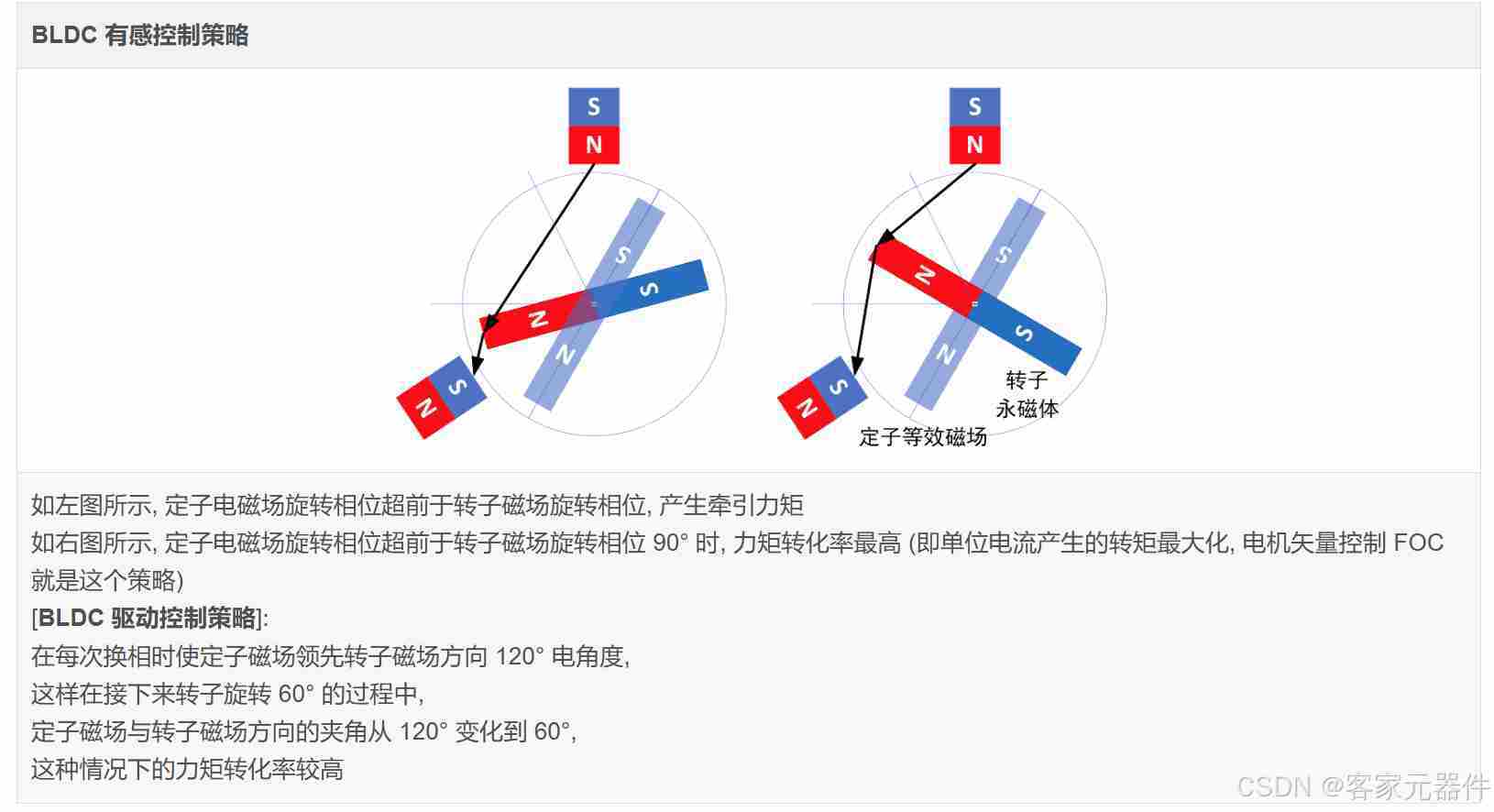
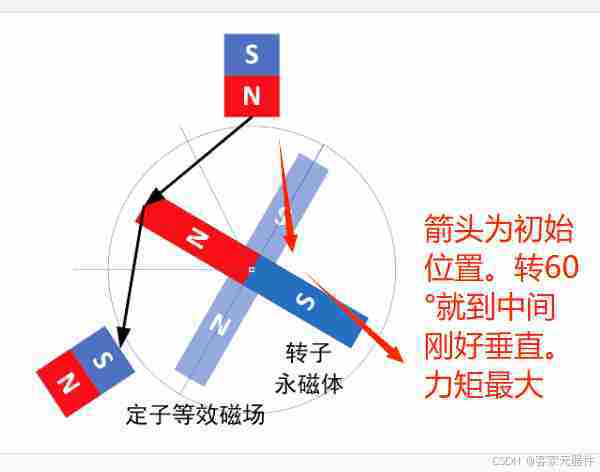
②转动过程中如何切换效率最大
无感驱动:不需要外部位置传感器,通过检测悬空相的反电动势的过零点,进行换相控制
优点:①成本和机构都有很大的简化:②电机只需要引出三根相线
缺点:带载、满载启动容易抖动或启动失败,只适合固定负载启动或者空载启动的场合
无感控制启动的时候可控性比较差。需要达到一定转速后才变得可控
应用场景:航模/无人机一般用无感方式。因为航空发动机启动后空中不需要停车。
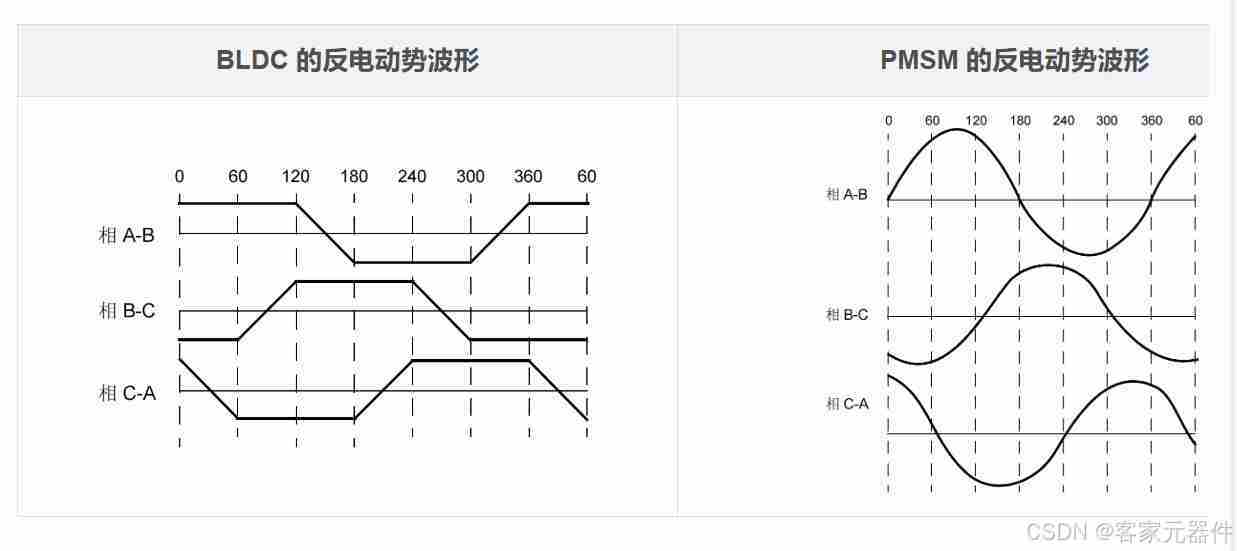
三、反电动势 (Back Electromotive Force, Back EMF)
指有反抗电流通过趋势的电动势。反电动势就是阻碍电机转动。如果电机需要维持原来的运动就需要电源提供能量。
BLDC (直流无刷电机)反电动势接近于梯形波, 而 PMSM(永磁同步电机) 反电动势接近于正弦波

















 7553
7553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









