






2- 基于51单片机的医院点滴监控系统(液位,滴速,步进电机)proteus,原理图、流程图、物料清单、仿真图、源代码
功能描述
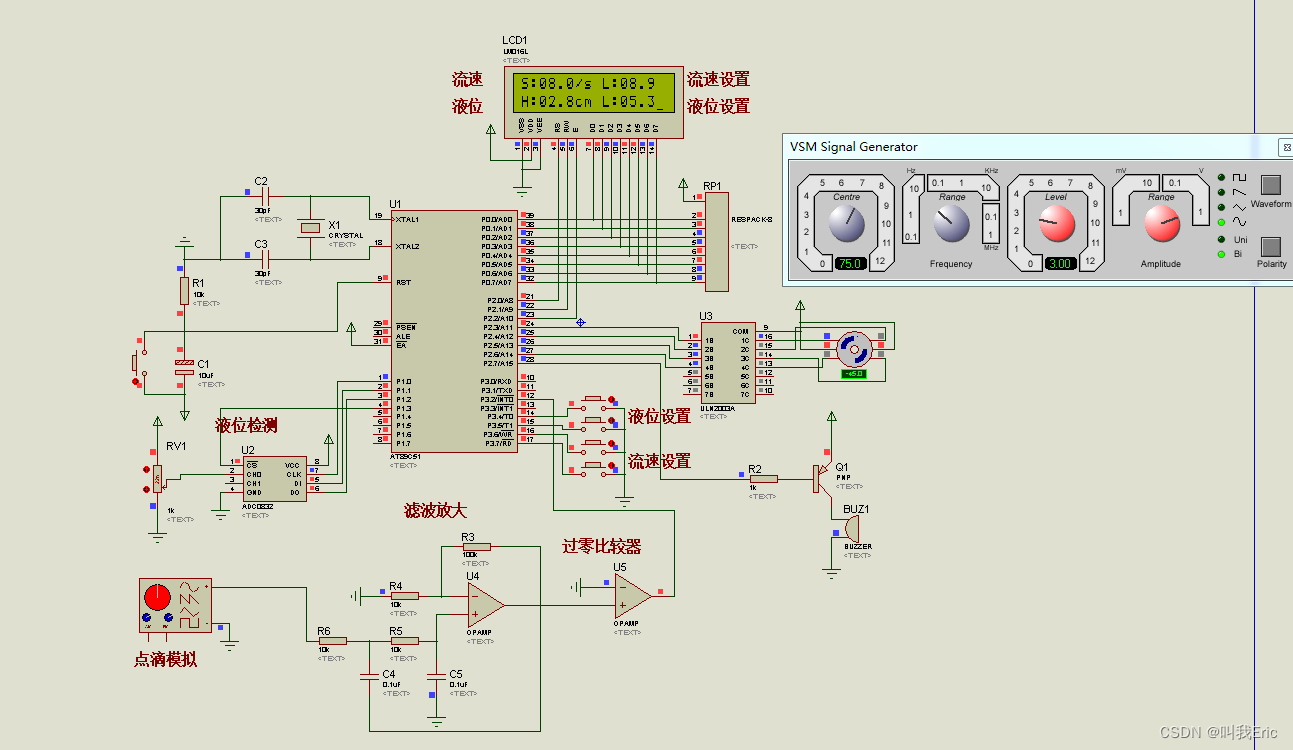
请自行下载资料。资料有问题请私信。
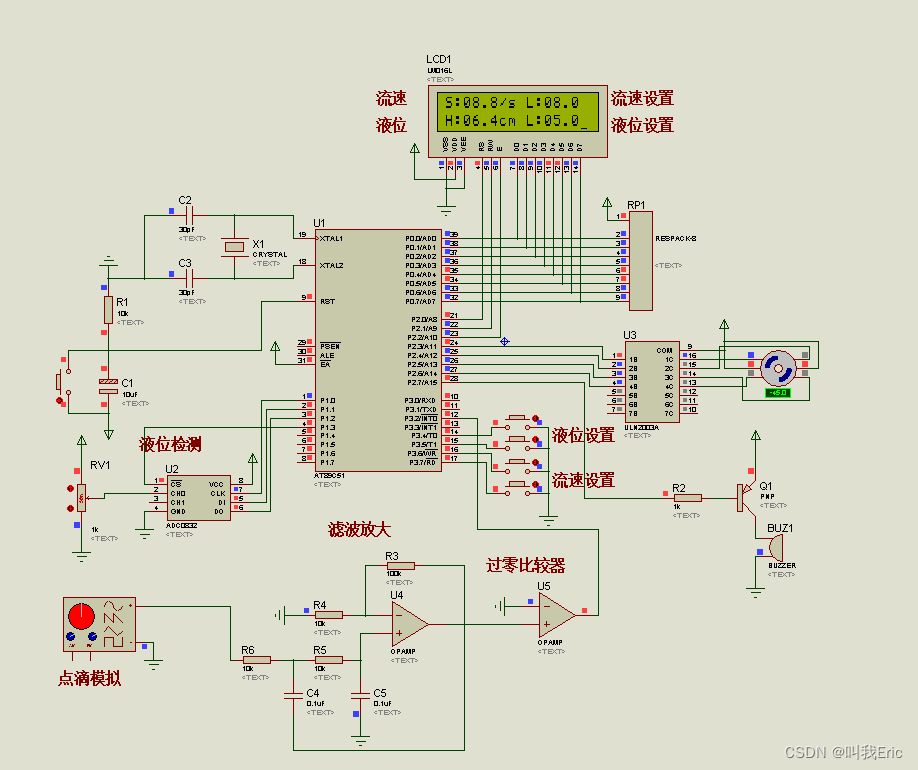
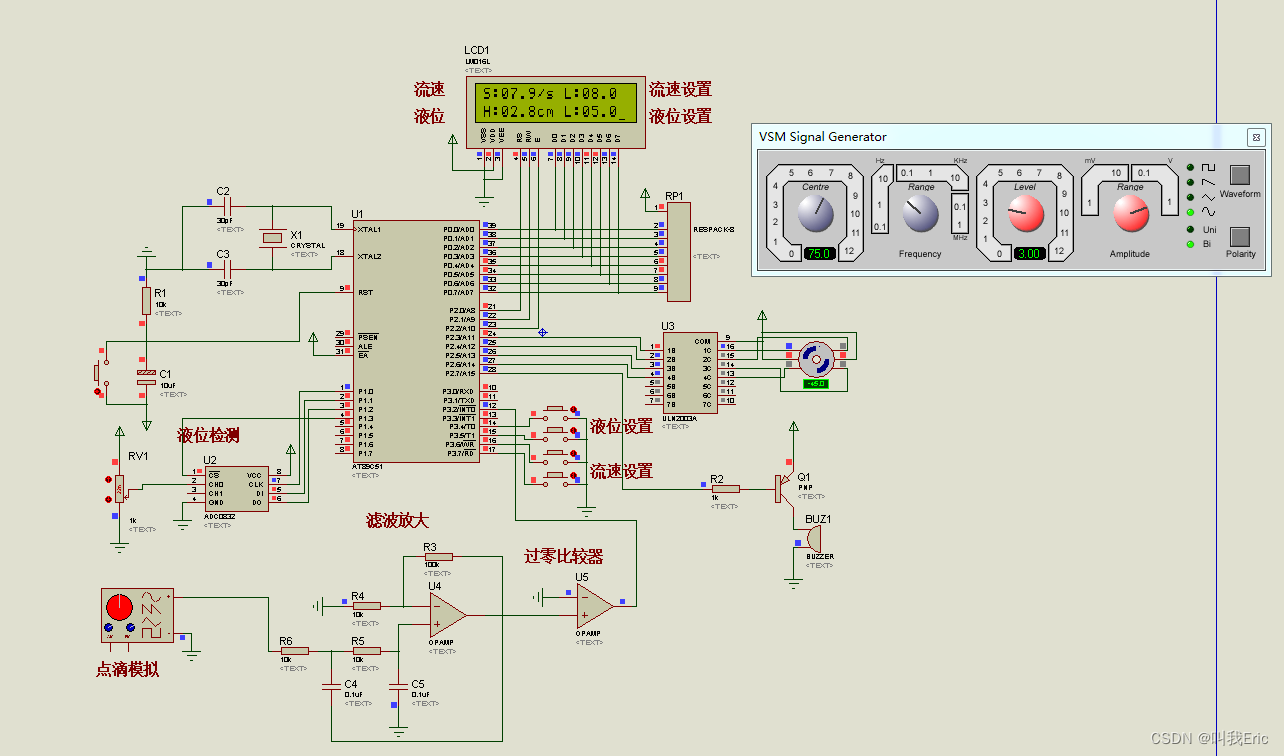
医院打点滴监控系统
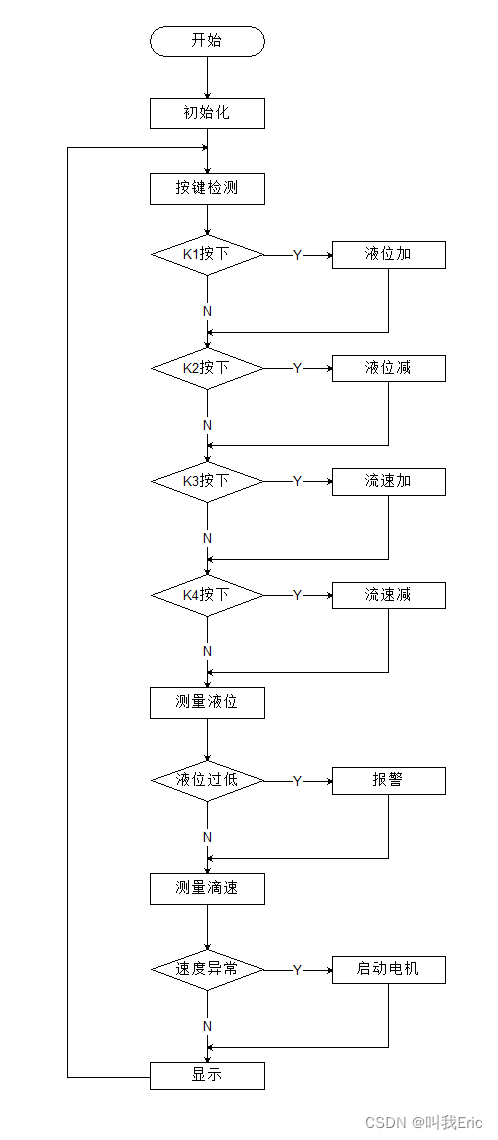
1、具有液位报警、液滴速度控制功能。
2、采用液位传感器测量液位高度,采用红外传感器测量液滴速度
3、如果液位低于设定值,蜂鸣器响
4、如果液滴速度不等于设定值,启动步进电机进行调节
资料包含:
1、proteus工程文件(.pdsprj)
2、原理图工程文件(.SchDoc)与PDF版本(.pdf),已调整为白底,可以直接截图使用,打印是纯白背景无网格。
3、流程图工程文件(.vsdx)与word版本(.docx/.doc)
4、物料清单excel表格(.xlsx)
5、源代码工程文件(.uvproj)
#include "reg51.h"
#include "ADC0832.h"
#include "lcd1602.h"
sbit beep=P2^7;//蜂鸣器
sbit k1=P3^4;//按钮
sbit k2=P3^5;
sbit k3=P3^6;
sbit k4=P3^7;
sbit AA=P2^3;//电机
sbit BB=P2^4;
sbit CC=P2^5;
sbit DD=P2^6;
sbit test=P1^7;
uchar high=0;//液位
uchar limit=50;//液位报警
uchar set=80;//流速设置
uchar speed=40;//流速
uchar time=0;
uchar hang1[]="S:00.0/s L:00.0";
uchar hang2[]="H:00.0cm L:00.0";
uchar ii;
void delay(uint i)//延时
{
uchar j;
while(i--)
{
for(j=0;j<110;j++);
}
}
void zheng()//正转
{
BB=1;delay(100);
AA=0;delay(100);
CC=1;delay(100);
BB=0;delay(100);
DD=1;delay(100);
CC=0;delay(100);
AA=1;delay(100);
DD=0;delay(100);
}
void fan()//反转
{
DD=1;delay(100);
AA=0;delay(100);
CC=1;delay(100);
DD=0;delay(100);
BB=1;delay(100);
CC=0;delay(100);
AA=1;delay(100);
BB=0;delay(100);
}
void main()
{
init_1602();
AA=1;BB=0;CC=0;DD=0;
IT0=1;//跳变沿出发方式(下降沿)
EX0=1;//打开INT0的中断允许。
TMOD|=0X01;
TH0=0X3C;
TL0=0XB0;
ET0=1;//打开定时器0中断允许
EA=1;//打开总中断
TR0=1;//打开定时器
while(1)
{
if(!k1)//液位设置
{
if(limit<100)
limit++;
while(!k1);
}
if(!k2)//液位设置
{
if(limit>0)
limit--;
while(!k2);
}
if(!k3)//速度设置
{
if(set<100)
set++;
while(!k3);
}
if(!k4)//速度设置
{
if(set>0)
set--;
while(!k4);
}
if(ii>set+10)//控制流速
zheng();
if(ii<set-10)
fan();
if(high<limit)
beep=0;
else
beep=1;
}
}
void Timer0() interrupt 1 //定时器0中断
{
if(time<20)//定时1s
time++;
else
{
time=0;
ii=speed;//测流速
speed=0;
high=ADC();//测液位
hang1[2]=ii/100+0x30; //显示
hang1[3]=ii%100/10+0x30;
hang1[5]=ii%10+0x30;
hang1[11]=set/100+0x30;
hang1[12]=set%100/10+0x30;
hang1[14]=set%10+0x30;
hang2[2]=high/100+0x30;
hang2[3]=high%100/10+0x30;
hang2[5]=high%10+0x30;
hang2[11]=limit/100+0x30;
hang2[12]=limit%100/10+0x30;
hang2[14]=limit%10+0x30;
write_string(1,0,hang1);
write_string(2,0,hang2);
}
TH0=0X3C;
TL0=0XB0;
}
void Int0() interrupt 0 //外部中断0的中断函数
{
speed++;
}
















 4783
4783

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











